 PoBot
PoBot
Les moyens de production de pièces mécaniques s’améliorent continuellement : plus grande précision, coûts moins élevés, simplicité d’utilisation des outils. C’est vrai dans l’industrie, c’est vrai dans les bureaux d’études. Et forcément nous bénéficions de ces progrès dans les loisirs et dans les activités techniques amateurs.
De même que les imprimantes 3D ont apporté aux concepteurs la capacité de produire des pièces uniques et solides, en combinant les avantages du prototypage rapide et (…)
Accueil > Mots-clés > Electronique > laser
laser
Le laser est un mode artificiel d’émission de la lumière mis au point pendant les années 60 pour des besoins scientifiques, puis utilisé à grande échelle car son faisceau rectiligne permet d’obtenir une surface d’éclairage extrêmement petite, permettant la lecture d’informations gravées à la surface d’un disque (et le CD-ROM était né).
En bricolage, les lasers puissants (40 watts par exemple) peuvent découper (vaporiser plus exactement) des matériaux durs comme le bois ou l’aluminium. Au-delà, ce serait dangereux :) donc seule l’industrie les emploie.
Les lasers permettent aux roboticiens de faire des mesures précises, et nous les avons utilisés dans plusieurs balises goniométriques.
Articles
-
 Les machines laser
Les machines laser
2 octobre 2011, par Julien H. -
 Balises à laser tournant interne (2004)
Balises à laser tournant interne (2004)
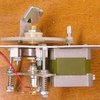
26 octobre 2010, par Julien H.En 2004, Patrick avait développé un système mêlant ingénieusement optique, mécanique et électronique. Il l’a utilisé sur le robot de la Coupe 2005 (une année riche en moyens de localisation puisque les balises à balayage laser ont été développées la même année).
Le principe est le suivant : un rayon laser émis à l’intérieur du robot est réfléchi sur un miroir tournant incliné à 45° pour faire un balayage horizontal autour du robot. Ce rayon est réfléchi par les balises inertes équipées (…) -
 Balise de détection par rétro-réflexion (2011)
Balise de détection par rétro-réflexion (2011)
13 juillet 2011, par Mathieu S., StephanLe laser permet une détection précise dans un encombrement réduit : l’avantage de son utilisation sur d’autres systèmes (radio, capteurs IR) est connu depuis nos débuts, comme le montre ce système à laser de 2004.
Mais pour pouvoir s’en servir dans les compétitions Eurobot, les équipes font face à une contrainte particulière depuis quelques années : seuls les lasers de classe 1 sont autorisés, ce qui limite les innovations technologiques basées sur la récupération de pointeurs lasers comme (…) -
 Les lasers de classe I
Les lasers de classe I
28 octobre 2008, par Julien H.Un condensé des différentes informations disponibles concernant l’utilisation de lasers dans un robot : dangers, classes, fournisseurs... notamment dans le contexte de la Coupe Eurobot
-
 Balises laser goniométriques (2005)
Balises laser goniométriques (2005)
31 octobre 2005, par Eric P.Principe de base
Le système développé calcule la position en X/Y du robot sur le terrain à partir des relèvements de sa position depuis les deux balises situées aux angles du terrain (côté adversaire), puis la communique au robot par liaison sans fil.
Le système se compose de : 2 balises d’angle, contenant un scanner laser destiné à mesure le gisement sous lequel est vu le robot (ou plus exactement, le réflecteur catadioptrique placé dessus) une balise de contrôle et de communication, (…) -
 Télémètre laser Hokuyo
Télémètre laser Hokuyo
8 février 2011, par Julien H.Nous avons récemment eu la chance de tester un télémètre Hokuyo. Kesako ? Tout simplement un (très gros) capteur de distance à balayage laser capable d’analyser tous les obstacles sur 240° en 1/10ème de seconde.
C’est le modèle URG-04LX-UG01 que nous avons testé. Il fait 7 centimètres de hauteur sur une base carrée de 5 x 5 centimètres. Son avantage est de fonctionner en 5 volts seulement.
Il voit de 2 cm à plus de 5 mètres (exactement 560 cm) et a une résolution angulaire de 0,36° ! Et (…)
