 PoBot
PoBot
 Balises à laser tournant interne (2004)
Balises à laser tournant interne (2004)En 2004, Patrick avait développé un système mêlant ingénieusement optique, mécanique et électronique. Il l’a utilisé sur le robot de la Coupe 2005 (une année riche en moyens de localisation puisque les balises à balayage laser ont été développées la même année).
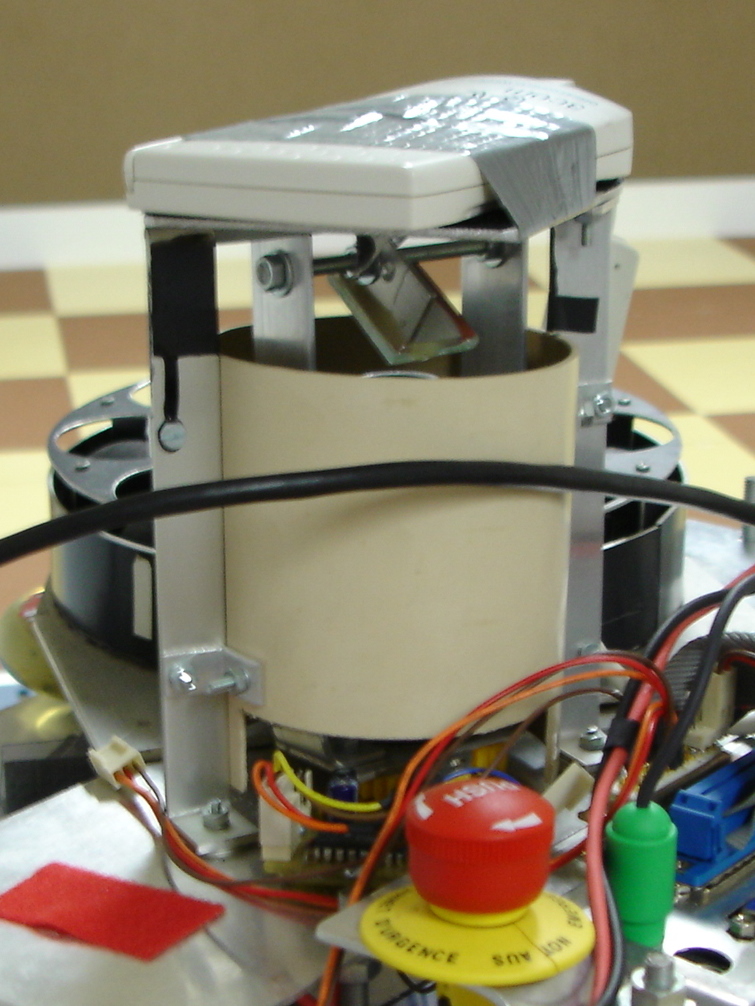
Le principe est le suivant : un rayon laser émis à l’intérieur du robot est réfléchi sur un miroir tournant incliné à 45° pour faire un balayage horizontal autour du robot. Ce rayon est réfléchi par les balises inertes équipées d’un morceau de catadioptre fin et va donc être récupéré par le même miroir et par un capteur très proche de l’émetteur laser.
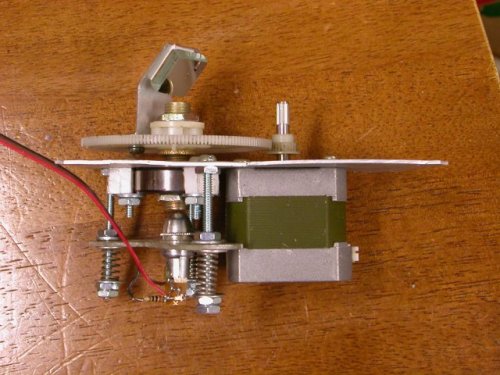
L’angle de rotation du miroir est piloté (ici par un moteur pas à pas) et permet ainsi de récupérer l’angle entre la balise / catadioptre qui a réfléchi le rayon et le robot (avec la propre orientation du robot).






Vos commentaires
# Le 19 avril 2011 à 15:35, par thibault En réponse à : Balises à laser tournant interne (2004)
En réponse à : Balises à laser tournant interne (2004)
bonjour,
petit question vis a vis du laser ?
les lasers sont ceu cité pour la balise de 2005 ? des lasers de conférencier, pas de problèmes avec la classe du laser ?
merci
tib
# Le 24 avril 2011 à 11:07, par Julien H. En réponse à : Balises à laser tournant interne (2004)
En réponse à : Balises à laser tournant interne (2004)
Bonjour,
A cette époque (2004), il n’y avait pas de restriction réglementaire et un simple laser de conférencier (classe 2) faisait l’affaire. Désormais pour un usage en Coupe de France (voire même Eurobot, je ne sais pas si tous les pays ont cette restriction), il faut du classe 1, ce qui est introuvable pour du DIY. Il faut passer par la case "banque" et sortir 1000 euros...
Répondre à ce message
# Le 10 mars 2011 à 16:43, par Charly En réponse à : Balises à laser tournant interne (2004)
En réponse à : Balises à laser tournant interne (2004)
Bonjour,
Est-il possible d’avoir de plus d’informations sur la matériel utilisé (type de télémètre laser notamment) ?
Merci d’avance
# Le 10 mars 2011 à 18:31, par Julien H. En réponse à : Balises à laser tournant interne (2004)
En réponse à : Balises à laser tournant interne (2004)
Il s’agit tout simplement d’un pointeur laser à 5 euros, démonté et modifié.
Répondre à ce message