 PoBot
PoBot
Comment rectifier un signal en entrée quand il est très brouillé : un cas pratique qui rappellera quelques bases de l’électronique. A compléter par vos propres expériences !
Accueil > Mots-clés > Electronique > analogique
analogique
On désigne ainsi tout signal dont la tension varie de manière continue, signifiant ainsi l’information. C’est le cas du son reçu d’un microphone ou transmis à un haut-parleur.
On oppose "analogique" à "numérique", signal pour lequel l’information est codée par un nombre fixe de valeurs prédéfinies, comme le code binaire où le 0 et le 1 sont les bornes de la tension transmises par le composant.
Le passage de l’un à l’autre se fait par un convertisseur analogique numérique, ou inversement par un convertisseur numérique analogique.
Articles
-
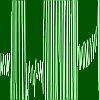 Filtrer un signal analogique
Filtrer un signal analogique
9 août 2008, par Julien H. -
 Capteur "flex sensor" résistif
Capteur "flex sensor" résistif
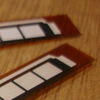
13 janvier 2011, par Julien H.Un capteur de flexion : voilà une utilisation originale des propriétés mécaniques des matériaux conducteurs. Cette fois pour un usage purement robotique puisqu’il s’agit de contrôler des moteurs en fonction de la courbure du capteur.
Le matériel
On utilise un capteur "Flex Sensor" de la société Spectra Symbol : deux fines couches de métal sont séparées par un polymère conducteur qui se déforme quand on le plie, modifiant la résistance aux bornes des deux couches métalliques.
Le capteur (…) -
 Potentiomètre linéaire
Potentiomètre linéaire
3 septembre 2010, par Julien H.Cet article rassemble les différents tests réalisés avec un potentiomètre motorisé de marque Alps, disponible pour 30 euros. C’est un capteur de position (une quinzaine de centimètres de débattement) qui peut être bricolé pour être relié à un robot (sa fonction première étant plutôt d’être manipulé par un humain). Par exemple relier une tige mobile au curseur pour savoir de combien un bras articulé s’est déplacé, etc..
C’est un bon petit atelier pour démarrer en robotique puisqu’il y a à (…) -
 Capteur de température analogique
Capteur de température analogique
14 janvier 2010, par Julien H.Le LM335Z est un simple capteur de température qui s’utilise très facilement.
Nous avions déjà étudié un capteur de température numérique, le LM75 décrit dans cet article, qui nécessitait d’utiliser un protocole de communication, I2C.
Le LM335Z est plus simple, il est analogique, c’est-à-dire qu’il présente une tension variable en fonction de la température. La variation de tension est linéaire : 10 mV par degré Kelvin (K). Avec un microcontrôleur (carte Arduino par exemple), on (…) -
 Anti-parasites pour capteur Sharp
Anti-parasites pour capteur Sharp
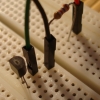
5 juillet 2011, par Julien H.Les capteurs GP2Dxx de Sharp sont très utiles pour évaluer une distance car ils sont simples à connecter et coûtent seulement une quinzaine d’euros. On les a déjà présentés dans cet article.
Modèles de capteurs Sharp chez Gotronic
Cependant lorsqu’on veut une bonne précision, il faut améliorer le capteur. Nous avions déjà traité le filtrage d’un signal analogique dans cet article.
Voici le problème :
Et l’explication est simple. Lorsque l’émetteur/récepteur infra-rouge fonctionne, il (…) -
 Servomoteur à retour de position
Servomoteur à retour de position
10 mai 2010, par Julien H.De la même manière qu’on a pu modifier un servomoteur pour obtenir une rotation continue, on peut modifier un servomoteur de modélisme standard (ici, un Futaba S3003) pour avoir un retour d’informations.
Dans le cas présent, on va tester le servomoteur à retour d’informations de EasyRobotics qui fournit une information de position sous forme d’une tension analogique, via un connecteur supplémentaire.
Matériel un servomoteur à retour d’informations une carte Arduino 5 câbles de connexion (…) -
 Acquisition et transmission de signaux
Acquisition et transmission de signaux
7 février 2012, par Julien H.Bien que la plupart des capteurs utilisent un protocole standard, on a parfois besoin d’un autre mode de communication pour s’interconnecter avec des équipements existants.
Le cas le plus courant est l’utilisation de centrales de traitement fermées acceptant des périphériques RS-232 ou RS-485. Dans ce cas-là, impossible d’implémenter son propre circuit et de programmer l’acquisition. Il faut intervenir du côté du capteur afin de fournir les signaux attendus.
Pour les capteurs basiques (…) -
 Accéléromètre Analog ADXL311
Accéléromètre Analog ADXL311
7 décembre 2008, par Julien H.Un accéléromètre est un composant de plus en plus courant dans des objets du quotidien : stabilisateurs d’image des camescopes numériques grand public, manette de console de jeux vidéo Nintendo Wii, etc..
On peut les utiliser dans des robots pour détecter des chocs, ou pour mesurer un déplacement (c’est un des composants d’une centrale inertielle, ou IMU, avec le gyroscope).
Les puces MEMS
L’accéléromètre que nous utilisons prend la forme d’un petit bout de silicium de quelques (…) -
 Robot suiveur de ligne (2011)
Robot suiveur de ligne (2011)
3 juillet 2011, par Antonin, LéoUn robot suiveur de ligne, tout le monde peut en faire un. La preuve en est donnée par Léo et Antonin, deux collégiens de 12 ans qui ont rejoint le club à l’automne 2010 et depuis ont réalisé plusieurs robots dont ce suiveur de ligne.
Un robot suiveur de ligne n’est pas forcément programmé, il peut être conçu pour réagir directement par une simple connexion électronique entre ses capteurs et ses moteurs.
La mécanique n’a pas non plus besoin de sortir des usines de Dassault Systèmes avec (…) -
 Carte d’interface USB K8055 / VM110
Carte d’interface USB K8055 / VM110
12 janvier 2009, par Julien H.Le module VM110 ou K8055 de Velleman est une carte d’expérimentation USB fournissant des entrées/sorties pilotées depuis un ordinateur connecté à un PC. Nous la présentons rapidement avant de proposer son utilisation via la DLL fournie contrôlée par un programme Java.
Elle possède simplement : 5 entrées numériques TTL 5V 2 entrées analogiques (convertisseur 8 bits) 8 sorties numériques 2 sorties analogiques (8 bits également) avec conversion analogique et PWM 2 compteurs 16 bits (…)
