 PoBot
PoBot
J’utilise des robots aspirateurs Roomba de la société iRobot depuis plusieurs années. A force de me rendre l’inestimable service de ne pas avoir à passer l’aspirateur (et donc de ne plus me faire engueuler quand j’avais le malheur d’oublier…) il a fallu procéder à quelques réparations. Dernière réparation en date, le changement du pare-choc. Il était tellement rayé que les capteurs infra-rouge de proximité ne voyaient plus les obstacles…
Refusant de jeter quoi que ce soit sans en avoir (…)
Accueil > Mots-clés > Electronique > infra-rouge
infra-rouge
L’infra-rouge désigne une partie non-visible de la lumière, qui permet donc de réaliser des capteurs de lumière qui ne sont pas sensibles à la luminosité ambiante mais aux seules sources d’infra-rouge, qui sont moins nombreuses et peuvent quand même être créées artificiellement à faible coût.
Articles
-
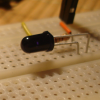
 iRobot Roomba : capteur infra-rouge
iRobot Roomba : capteur infra-rouge
16 mars 2011, par Frédéric Bernat -
 Caméra IR avec une Wiimote
Caméra IR avec une Wiimote
21 février 2009, par Julien H.La Wiimote (pour Wii Remote) est une télécommande pour la console de jeu Nintendo ’Wii’ dont vous avez peut être déjà entendu parler.
Ses caractéristiques sont : des boutons (normal pour une télécommande) un accéléromètre 3 axes (c’est déjà moins commun) un port d’extension I2C (là, ça se rapproche de notre domaine) une connexion Bluetooth (sympa !) une caméra infra-rouge de résolution 1024x768 (c’est ce qui nous intéresse ici)
L’idée est d’utiliser le module caméra pour repérer des (…) -
 Barrière infra-rouge
Barrière infra-rouge
30 janvier 2009, par Julien H.Nous avons déjà présenté différents articles utilisant des leds infra-rouge pour de la détection d’obstacle ou même pour une barrière : Capteur de proximité IR Dépose des balles
Une rubrique est d’ailleurs consacrée aux différents composants optiques : Détecteurs et capteurs optiques
Mais dans cet article, nous allons faire un petit montage très simple en utilisant tout d’abord des diodes infra-rouge émettrices et réceptrices. Puis nous résoudrons les problèmes pour aller vers des (…) -
 Roues codeuses
Roues codeuses
15 septembre 2009, par KeurondeComment réaliser des roues codeuse pour un moindre coût.
-
 Capteur de distance infra-rouge (Sharp)
Capteur de distance infra-rouge (Sharp)
18 octobre 2008, par Julien H.La famille GP2D de Sharp est connue en robotique pour servir : de capteur de présence (retournant une information tout ou rien ou bien à seuil fixe) ou en mesure de distance (résultat transmis sous forme analogique ou par voie série).
Ils coûtent une quinzaine d’euros et on les trouve facilement (exemple : Gotronic). Cet article est une introduction pour faciliter leur utilisation et bien comprendre leur fonctionnement pour éviter les erreurs de débutants.
Ces capteurs utilisent un (…) -
 Balises goniométriques 2013 (1ère partie)
Balises goniométriques 2013 (1ère partie)
10 août 2013, par Eric P.Premiers éléments de la construction d’un démonstrateur de balises de localisation goniométriques utilisant des détecteurs d’obstacle à capteur infra-rouge.
-
 Robot joueur de foot
Robot joueur de foot
17 décembre 2010, par Julien H.En cette dernière semaine avant Noël, Laurent nous fait découvrir un robot bipède qui joue au foot.
Robot en vente sur Zartronic.fr Caractéristiques
– compatible Arduino
– 4 servomoteurs
– détecteur de distance infra-rouge
– autonome ou télécommandé
– prix modéré
On attend donc que le Père Noël descende par la cheminée pour l’apporter : rendez-vous en janvier pour nos premiers coups de pied dans le ballon rond lors des ateliers du vendredi. -
 Parasites sur des capteurs Sharp
Parasites sur des capteurs Sharp
1er mai 2010, par Julien H.Ce petit article a pour objectif de présenter un problème rencontré avec deux capteurs infra-rouge Sharp et si possible de trouver une solution.
Voici le problème : des parasites quand les deux capteurs Sharps sont utilisés ensemble.
Ces images sont obtenues simplement en envoyant aussi vite que possible les valeurs reçues sur les convertisseurs analogiques.
A gauche, les deux capteurs ensemble. A droite, un capteur seul (même chose avec le second).
D’autres vues du problème : on (…) -
 Accostage sur dock de rechargement ROOMBA
Accostage sur dock de rechargement ROOMBA
17 mai 2011, par Frédéric BernatAlgorithme de docking pour recharger les batteries d’un robot
-
 Évitement d’obstacles et de chutes de R2-D2
Évitement d’obstacles et de chutes de R2-D2
10 août 2012, par Julien H.Lors de la conception du robot droïde, la priorité a été mise sur la sécurité. Il s’agit d’un robot mobile autonome de plus d’un mètre de haut, pesant plus qu’un enfant de même taille. Il est donc primordial qu’il puisse s’arrêter de lui même en cas de problème : collision, perte d’équilibre, voire chute.
La solution ne peut pas simplement être un bouton d’arrêt d’urgence : nous n’aurons pas forcément accès au robot. Cela ne peut pas non plus être une télécommande : la personne qui la (…)
