 PoBot
PoBot
Lorsqu’on veut piloter un tel robot, une interface graphique est bien plus pratique qu’une interface en ligne de commande. Mais encore faut-il bien la concevoir.
Et pour ça, au lieu de foncer tête baissée dans le code, on s’interroge sur les besoins (ou "cahier des charges"). Ainsi on ne va pas penser à tout ce qu’on pourrait faire de joli et de clignotant, mais à ce que l’utilisateur (qui peut bien sûr être vous-même) a besoin.
Cahier des charges
Si on reprend le bipède de (…)
Accueil > Mots-clés > Logiciel et programmation > simulation
simulation
Articles
-
 Conception d’une interface utilisateur graphique
Conception d’une interface utilisateur graphique
2 novembre 2009, par Julien H. -
 Évitement et contrôle de trajectoire
Évitement et contrôle de trajectoire
17 septembre 2005, par Eric P.Présentation du premier simulateur de robot, développé en 2004 pour mettre au point les algos d’évitement d’obstacles et de contrôle de trajectoire.
-
 Banc de simulation dynamique
Banc de simulation dynamique
27 avril 2009, par Julien H.Ce nouveau projet consiste à tester le fonctionnement de différents moteurs dans des conditions proches de l’utilisation en robotique mobile sans avoir à subir les contraintes de mise en oeuvre réelle sur une base roulante.
Ainsi, ce banc de simulation servira à la fois aux débutants pour tester leurs algorithmes de contrôle, et aux plus expérimentés pour rechercher les paramétrages aux conditions limites de fonctionnement avant patinage. Lorsque nos tests seront terminés, nous pourrons (…) -
 Simuler un robot
Simuler un robot
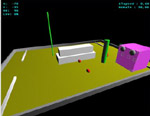
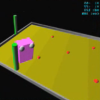
5 août 2010, par Julien H.Il est très utile de valider un concept, un design ou un algorithme en simulant le fonctionnement par un programme informatique. Plutôt qu’un long discours, voici d’abord un exemple :
Cette vidéo montre le déplacement d’un robot sur le thème de la Coupe de France 2008 : on va récupérer 3 boules sur 3 totems différents et on va marquer (à l’autre bout du terrain) et on répète le mouvement. Simple non ?
On voit bien qu’à vitesse "habituelle", on ne pourrait parcourir que 3 fois le terrain. (…) -
 Interface en ligne de commande
Interface en ligne de commande
19 mars 2009, par Julien H.Tout d’abord, rappelons ce qu’est une interface en ligne de commande. Il s’agit d’un moyen de communiquer entre un humain et une machine, en tapant du texte lisible dans une console. En anglais, CLI pour Command Line Interface.
On a tous utilisé au moins une fois la ligne de commande, c’est le DOS (pour les Microsoftiens) ou le Shell (pour les Linuxiens). Donc l’objectif ici est de communiquer avec une carte Arduino en tapant dans un terminal des consignes du type "gauche45" ou "avance50" (…)
