 PoBot
PoBot
Les moyens de production de pièces mécaniques s’améliorent continuellement : plus grande précision, coûts moins élevés, simplicité d’utilisation des outils. C’est vrai dans l’industrie, c’est vrai dans les bureaux d’études. Et forcément nous bénéficions de ces progrès dans les loisirs et dans les activités techniques amateurs.
De même que les imprimantes 3D ont apporté aux concepteurs la capacité de produire des pièces uniques et solides, en combinant les avantages du prototypage rapide et (…)
Accueil > Mots-clés > Fabrication > CNC
CNC
On appelle CNC une machine à commande numérique par ordinateur, c’est-à-dire un ensemble d’outils de construction mécanique (fraises, moteurs) dont le fonctionnement est intégralement géré par un programme informatique : mise en route, déplacement de l’objet à couper, vitesse et dimensions du fraisage.
Les amateurs peuvent depuis quelques années acquérir des CNC pour des prix (relativement) abordables, ou même construire leur propre machine. Les composants utilisés sont similaires à ceux d’un robot : moteurs pas-à-pas, courroies, contrôleur de puissance, etc...
Articles
-
 Les machines laser
Les machines laser
2 octobre 2011, par Julien H. -
 Bien usiner le plexiglas
Bien usiner le plexiglas
30 mars 2012, par Eric P.Vous construisez un robot et pensez qu’il faut de l’aluminium pour être solide et facile à faire ? lisez ces conseils issus de nombreuses expériences.
L’avantage du plexiglas est qu’il se travaille plus facilement que l’aluminium et qu’il coûte beaucoup moins cher.
C’est assez solide pour un robot même de 20 centimètres, surtout en 5mm d’épaisseur. De plus s’il y a des efforts pouvant induire des déformations, il suffit de prévoir des raidisseurs en profilé alu (T, carré creux,...) tels (…) -
 Monte-charge du robot 2011
Monte-charge du robot 2011
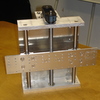
3 octobre 2011, par StephanLe monte-charge est un actionneur spécifique du robot PoBot 2011 répondant à un besoin du règlement Eurobot : empiler des pions les uns sur les autres. Mais il faisait bien plus que ça comme vous allez pouvoir le constater.
Il est composé d’un châssis en échelle sur lequel coulisse une plaque de fixation verticale mise en mouvement linéaire par une vis sans fin.
Massif, il s’intégrait parfaitement dans le châssis :
La vis trapézoïdale
Contrairement à une poulie, la vis à pas (…) -
Choisir une fraise pour le plexiglas
30 janvier 2011, par Eric P., StephanVoici les notes d’un échange concernant le choix d’une fraise pour travailler le plexiglas. En effet, cet outil existe en différentes formes qu’il faut savoir sélectionner en fonction du résultat attendu.
Nous n’avons pas pour objectif de trancher définitivement la question, mais d’apporter des arguments et un retour d’expérience concret, à défaut d’être exhaustif.
Le problème
On souhaite graver du plexiglas qui sert de support à une démonstration robotique, afin d’y afficher des (…) -
 Une éolienne à vitesse constante (2012)
Une éolienne à vitesse constante (2012)
9 septembre 2012, par Jean-PierreLa construction d’une structure mobile comme une éolienne n’est pas tellement éloignée de celle d’un robot mobile. Elle est intéressante d’un point de vue mécanique et électronique.
Le modèle choisi pour cet "EoleBot" est une éolienne à axe vertical avec un mécanisme ingénieux permettant une vitesse constante et donc une protection contre les vents forts. Les explications et les consignes de fabrication sont disponibles sur le site On peut le faire.
Principe
Mais pourquoi une vitesse (…) -
 Fabrication des pieds de R2-D2
Fabrication des pieds de R2-D2
12 août 2012, par Jean-Pierre, Julien H.Cet article présente la fabrication de la coque qui recouvre chacun des trois pieds, mais aussi des plates-formes intérieures qui soutiennent les roues et les moteurs. Il présente des astuces mécaniques qui nécessitent des connaissances en robotique, notamment les contraintes de poids, de couple et de vitesse et leurs effets sur les frottements et les glissements.
La coque
Le moule a été réalisé en polystyrène extrudé (disponible en grande surface de bricolage par couches de 6 (…) -
 Une motorisation en récup’
Une motorisation en récup’
24 mars 2013, par Eric P.Comment assembler à relativement peu de frais un groupe propulseur puissant pour un robot roulant.
-
 Quarduino : quatre pattes et une Arduino (2011)
Quarduino : quatre pattes et une Arduino (2011)
2 octobre 2011, par LoïcLe robot Quarduino a été construit après une première expérience avec en mécanique et en électronique avec des drones bi-rotors.
Les premières pièces ont été taillées dans du bois léger, et percées pour se connecter directement sur les servomoteurs.
Première version
A l’origine, le robot n’était pas autonome : il se pilotait à partir d’une IHM personnelle pour Arduino. Puis l’idée est apparue d’enregistrer les commandes sous forme d’une séquence textuelle d’ordres envoyés par liaison (…) -
 Gravure anglaise
Gravure anglaise
10 mars 2011, par Julien H., StephanLa méthode de gravure anglaise consiste à travailler une plaque recouverte de cuivre avec des outils mécaniques afin d’y tracer un circuit électronique, sans utilisation de produits chimiques.
La précision nécessaire pour réaliser un circuit "utile" neutralise toute utilisation d’outils à main. Par contre cette gravure devient très intéressante pour ceux qui possèdent ou ont accès à une machine à commande numérique (CNC).
Nous avons utilisé une fraiseuse numérique que Stephan maîtrise (…) -
 Notre fraiseuse Elektor Profiler
Notre fraiseuse Elektor Profiler
30 décembre 2012, par Julien H.Depuis 2012, le club dispose enfin de sa propre fraiseuse à commande numérique grâce à la générosité de Patrick, co-fondateur et premier président du club. Nous pourrons pleinement en profiter dès que nous serons installés dans un local permanent, début 2013.
La machine-outil fonctionne grâce à un quatuor complémentaire :
– une table portique CNC Elektor Profiler de Colinbus
– un contrôleur Axemotion PulseBox
– un logiciel de CAO/FAO Galaad
– une fraiseuse Proxxon
Le contrôleur nous (…)
