 PoBot
PoBot
 Quarduino : quatre pattes et une Arduino (2011)
Quarduino : quatre pattes et une Arduino (2011)Le robot Quarduino a été construit après une première expérience avec en mécanique et en électronique avec des drones bi-rotors.
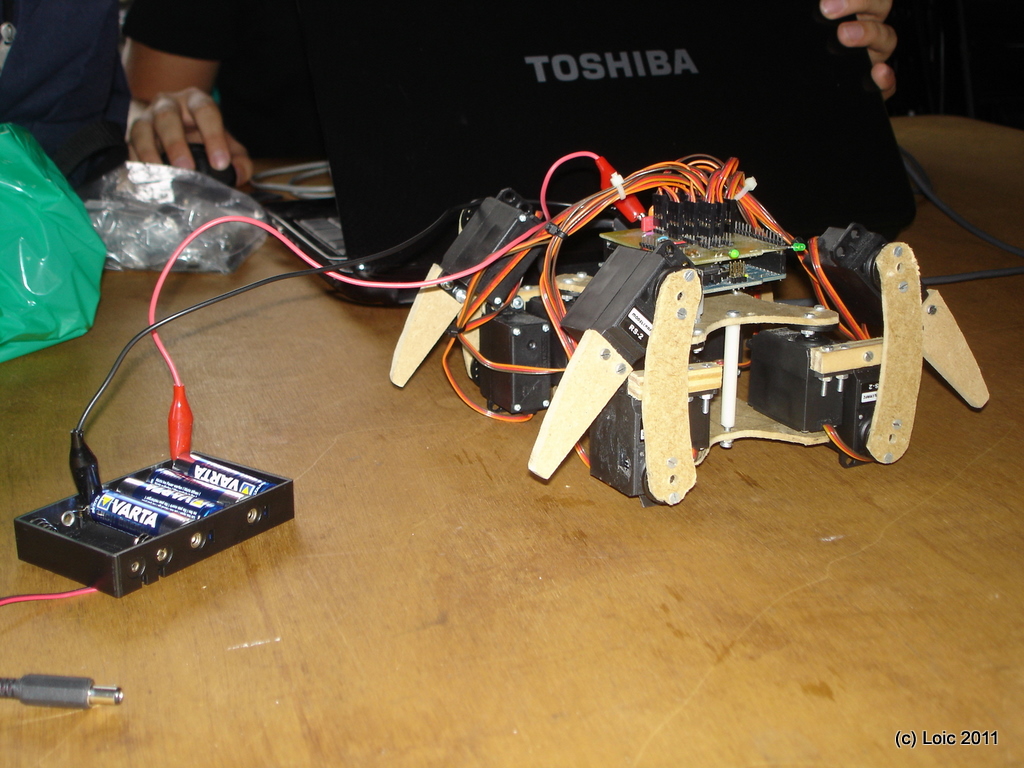
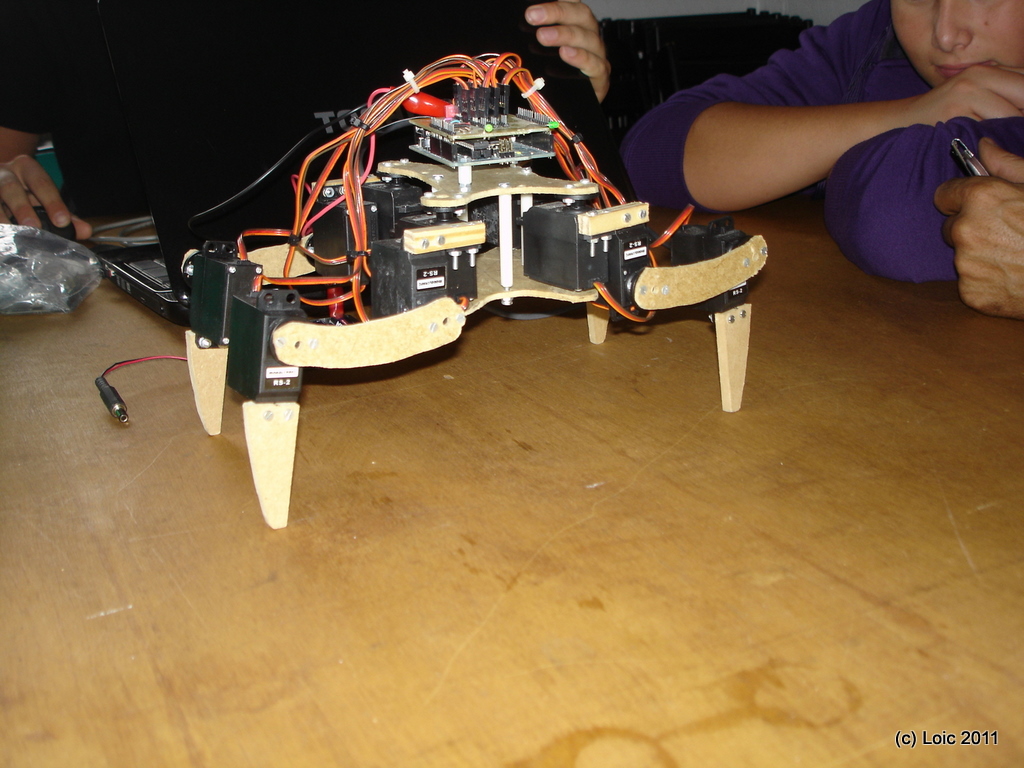
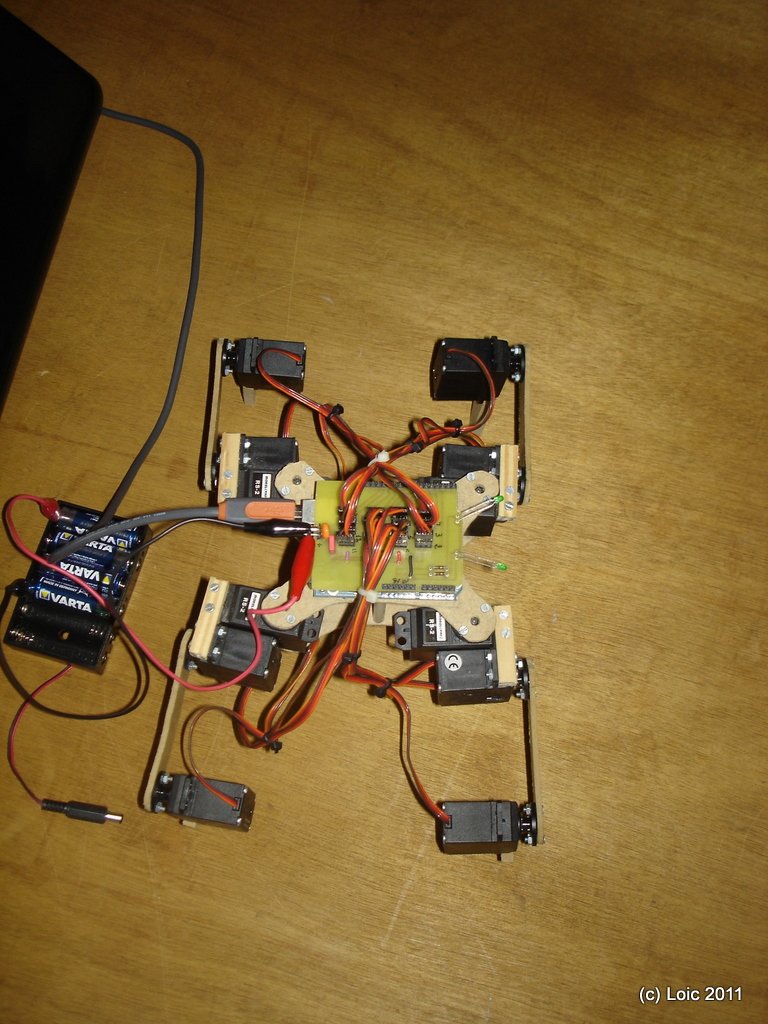
Les premières pièces ont été taillées dans du bois léger, et percées pour se connecter directement sur les servomoteurs.
Première version
A l’origine, le robot n’était pas autonome : il se pilotait à partir d’une IHM personnelle pour Arduino. Puis l’idée est apparue d’enregistrer les commandes sous forme d’une séquence textuelle d’ordres envoyés par liaison série jusqu’à la carte Arduino qui pilote le robot.
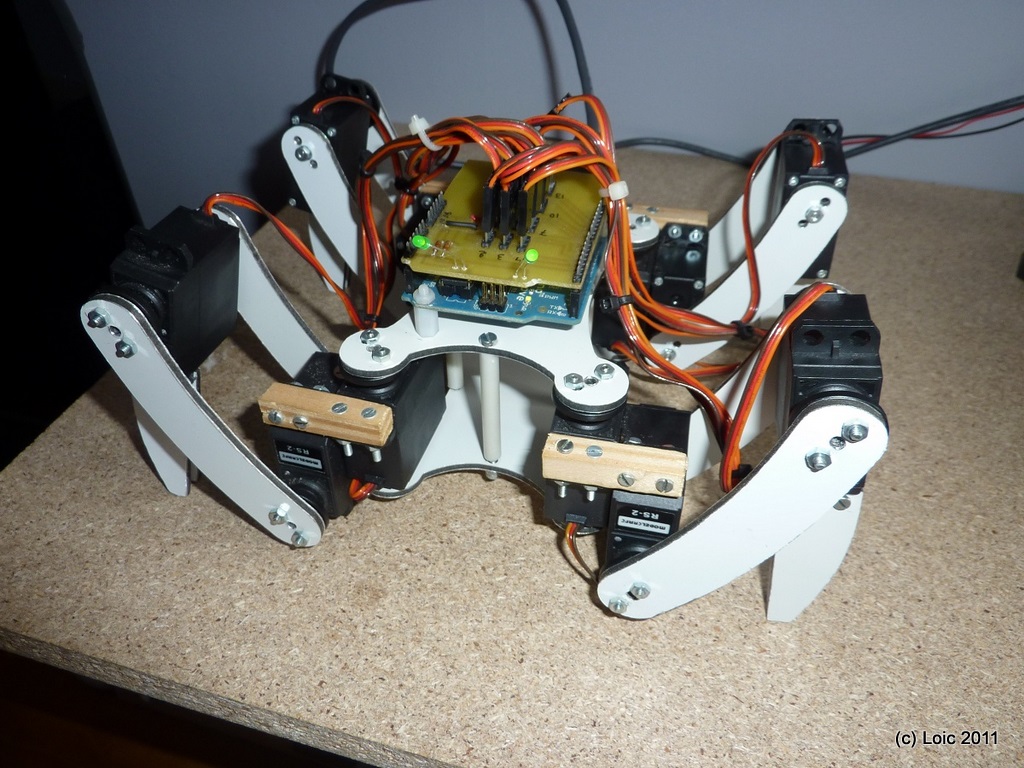
Seconde version
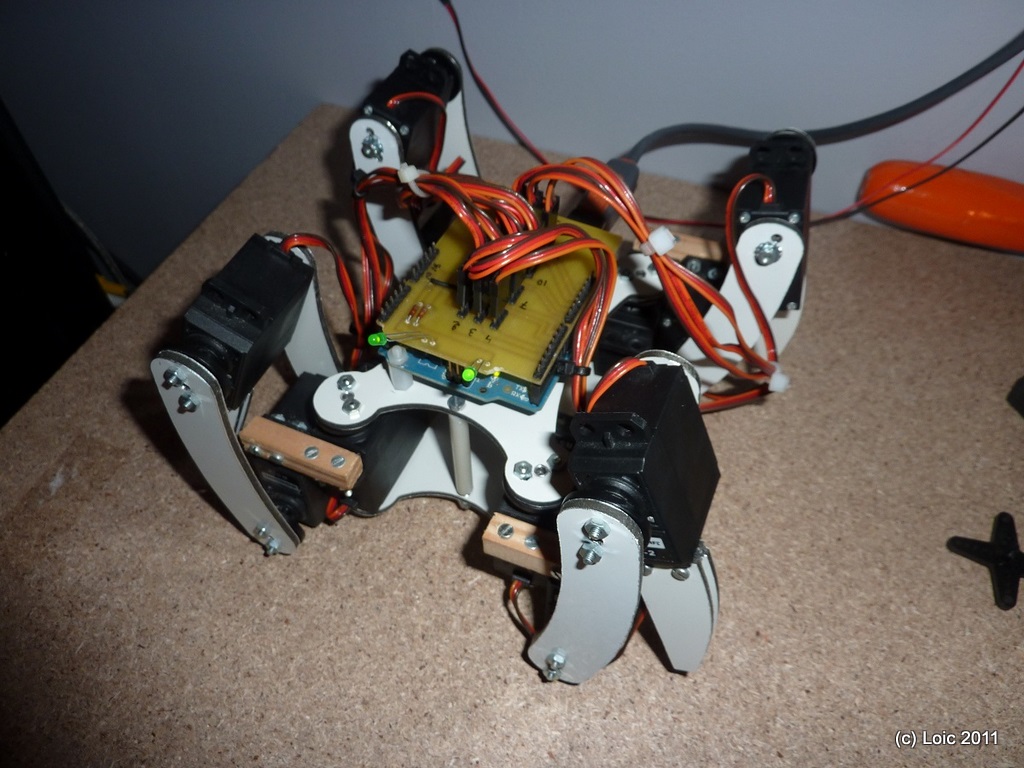
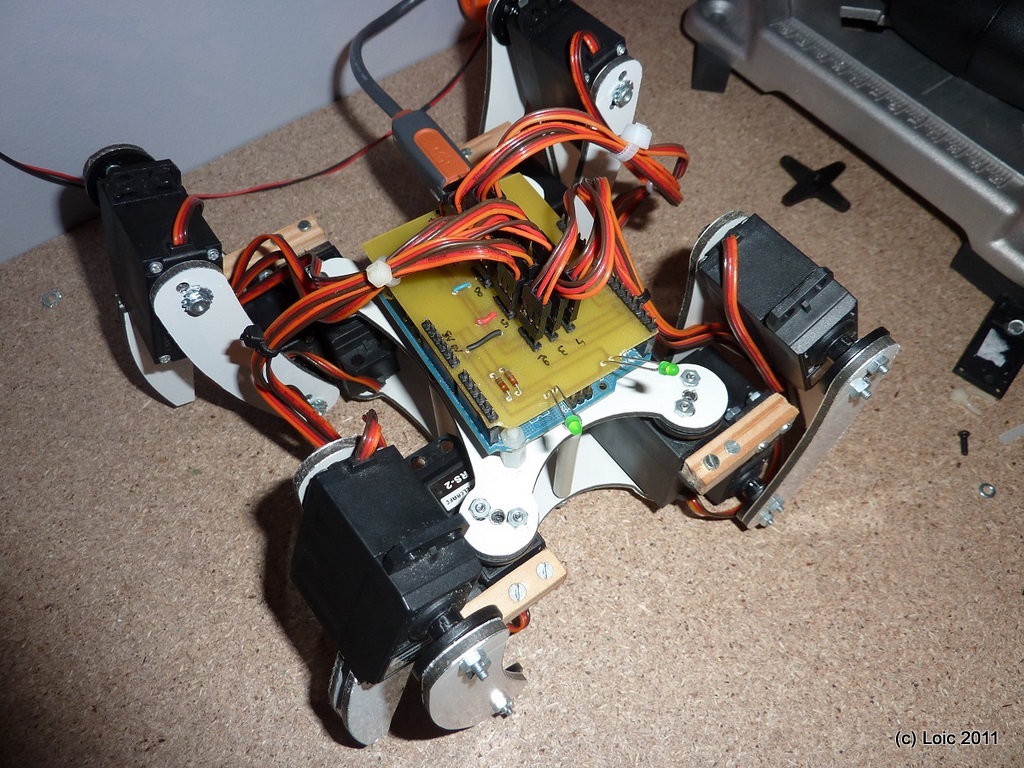
Après la rencontre avec Pobot, de nouvelles idées sont apparues. La première mise en œuvre a été de refaire les pièces dans un matériau très utilisé par le club : deux feuilles métalliques d’aluminium fin entourant une mousse plastique légère.
L’ensemble est très résistant et bon marché car essentiellement récupéré parmi les chutes des entreprises de publicité et d’enseignes (avis au lecteur : on en recherche toujours !).
Il a fallu quelques heures pour prendre en main le logiciel Galaad permettant de reproduire le schéma des pièces en version électronique et pouvoir les découper avec une machine CNC.
Désormais, toutes les pièces sont identiques, ce qui donne des mouvements beaucoup plus fluide et une meilleure répartition des poids.
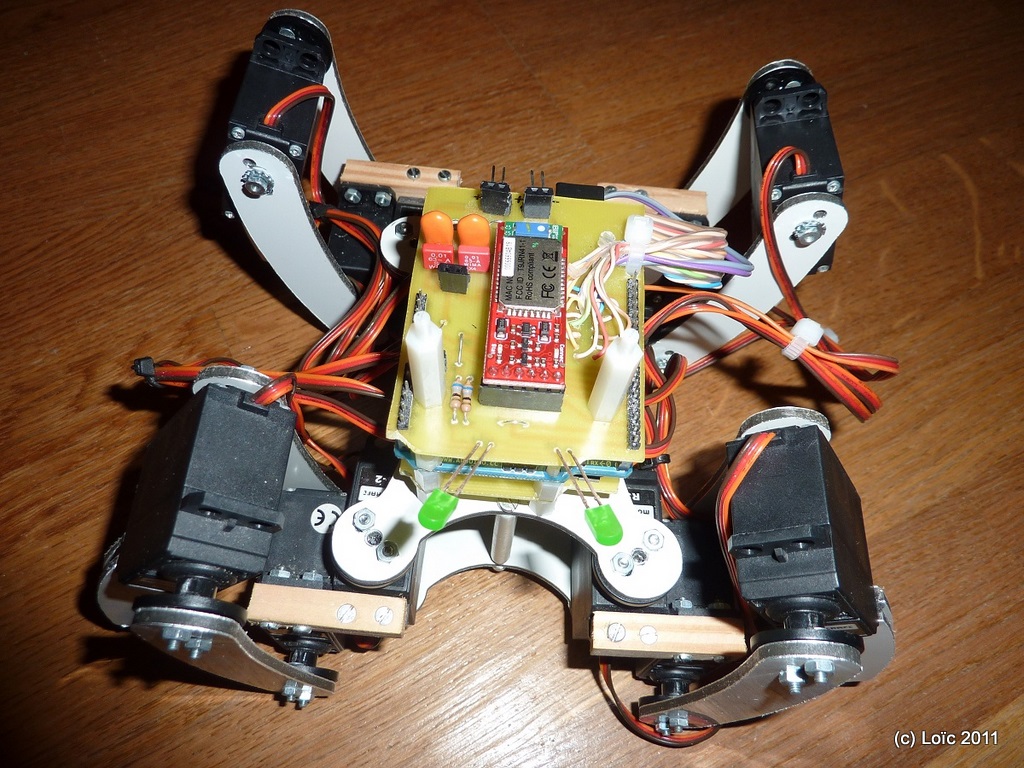
Commande sans-fil
Indépendamment du changement de mécanique, le robot peut être équipé d’un module Bluetooth pour le contrôle à distance, avec un ordinateur, une autre carte électronique ou un téléphone portable.

Composants utilisés
Pour la base
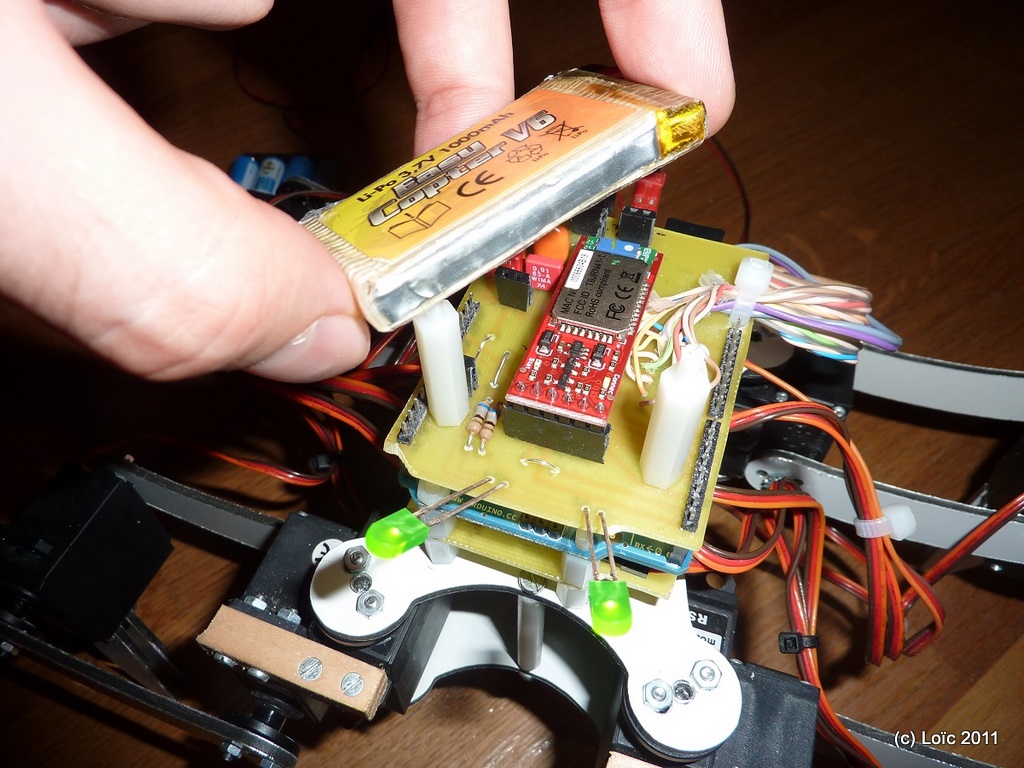
– une carte électronique programmable Arduino
– une batterie (entre 7 et 9 volts)
– douze servomoteurs (3 par pattes)
Version améliorée
– un shield maison pour connecter tous les servomoteurs
– une extension Bluetooth pour la commande à distance
Logiciels utilisés
Général
– une interface Arduino IHM générique puis spécialisée
– le logiciel Arduino pour la programmation
– Qt pour réaliser l’IHM
Seconde version
– Galaad pour dessiner les pièces
– Galaad pour usiner les pièces (pratique non ?)
Matériel utilisé
Première version
– une scie à chantourner
– une perceuse
Seconde version
– une machine à commande numérique CNC (découpe et perçage aussi)
Démonstrations
Le robot marche désormais :
Comme le robot Nao, il sait aussi bien danser :





Vos commentaires
# Le 31 octobre 2011 à 14:24, par alban En réponse à : Quarduino : quatre pattes et une Arduino (2011)
En réponse à : Quarduino : quatre pattes et une Arduino (2011)
Bonjour ....
Juste une petite question ...comment as tu fait pour synchroniser tous les servo en codant sur l’arduino...
Répondre à ce message