 PoBot
PoBot
Les étapes pour concevoir un circuit imprimé sont généralement : le schéma électrique de principe la sélection des composants réels le dessin du circuit imprimé
Nous allons présenter dans cet article l’utilisation de Fritzing, un outil de conception innovant qui propose une nouvelle première étape : la visualisation des composants réels comme sur une platine d’essai.
Installation
J’ai essayé plusieurs versions au fil de l’année écoulée, avec plus ou moins de succès, donc je conseille (…)
Accueil > Mots-clés > Culture générale > Open Source
Open Source
Ce terme désigne un mode de licence (droits d’utilisation, droits de reproduction) non propriétaire, c’est-à-dire que les créateurs (d’un logiciel, d’un composant, d’un matériel, d’une oeuvre au sens général) donnent des droits moins restrictifs.
Les logiciels libres (tels que définis par la Free Software Foundation) sont une sous-partie de l’Open Source, un peu plus contraignant.
L’électronique grand public (et donc la robotique) a vu apparaitre ces dernières années du matériel open source. Une petite révolution qui permet une diffusion rapide des connaissances, mais ne doit pas laisser croire que tout est simple et idéal.
Articles
-
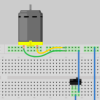 Schéma et circuits électroniques avec Fritzing
Schéma et circuits électroniques avec Fritzing
1er décembre 2009, par Julien H. -
 Installer des logiciels sous Linux
Installer des logiciels sous Linux
12 juin 2011, par Julien H.Il existe différentes manières d’installer un logiciel sous Linux.
Lorsqu’on utilise une version sympathique pour l’utilisateur, comme Ubuntu, on dispose d’une logithèque graphique qui présente différents logiciels par catégorie.
A noter qu’il est possible d’y trouver des logiciels de partenaires (regroupés dans un ensemble appelé "Canonical") en plus des logiciels Ubuntu. Ainsi, Skype, Java Sun et d’autres logiciels grand public sont accessibles et installables en un clic.
Un autre (…) -
 Modes de production du matériel open source
Modes de production du matériel open source
6 décembre 2010, par Julien H.Contrairement à l’immatériel des logiciels open source, dont la réplication est illimitée et à coût nul, le matériel ne peut être répliqué sans frais.
Il faut des matières premières et de l’énergie, et prendre également en compte les outils nécessaires, voire même une première matrice dont le coût est souvent élevé et nécessite une quantité minimum.
Pour ne pas avoir à assumer ce coût de production, on peut juste mettre les schémas de construction et d’assemblage à disposition libre et (…) -
 DFRduino RoMeo Rev1.1
DFRduino RoMeo Rev1.1
24 juin 2012, par Eric P., Julien H.Nous avions testé la RoMeo peu après sa sortie en 2008, et plusieurs de nos robots l’utilisent, comme le Tankobot, Baba, Roverduino.
Une nouvelle version est sortie en 2011, et nous découvrons ses fonctionnalités.
Attention, une version 2.0 est sortie en 2013, et elle est très différente.
La carte RoMeo est une adaptation pour le contrôle de moteurs à courant continu et le prototypage rapide de la célèbre Arduino. C’est un modèle désormais connu et répandu, car malgré ses plus grandes (…) -
 Logiciel d’un robot bipède
Logiciel d’un robot bipède
17 novembre 2013, par Julien H.Notre robot bipède est désormais équipé d’une carte Arduino qui contrôle les 4 servomoteurs en microsecondes et pas en degrés : cela permet des mouvements beaucoup plus fluides.
-
 leJOS sur le MindStorms EV3
leJOS sur le MindStorms EV3
1er novembre 2013, par Eric P.Témoignage des premiers pas avec leJOS sur l’EV3... et des cerises sur le gâteau.
-
 Robot danseur à SophiaConf 2013 (Nice Matin)
Robot danseur à SophiaConf 2013 (Nice Matin)
8 juillet 2013, par Julien H.Le jeudi 4 juillet 2013, deux adhérents de l’association Pobot participaient à la conférence consacrée à l’Open Source et l’Open Hardware dans le cadre de SophiaConf organisée par Telecom Valley sur le campus SophiaTech.
L’occasion pour Audrick de présenter le robot danseur Drikybot et à Eric de présenter son boîtier MidyAX pour guitaristes.
Merci pour cet article qui montre une fois de plus la diversité de la technopole et l’aide apportée par l’association aux projets innovants. -
 Conception de services connectés
Conception de services connectés
9 mai 2014, par Gilles O., Julien H.Après plusieurs semaines de réflexion, nous partageons la conception de services autour du Cube Media en vue de réunir un grand nombre de volontaires pour développer et mettre en application ces idées, bien au-delà de l’association.
-
 Reconnaissance visuelle avec Harpia
Reconnaissance visuelle avec Harpia
11 juin 2011, par Julien H.La reconnaissance visuelle permet à un robot de déterminer dans son environnement des formes ou des couleurs, que ce soit pour s’en approcher (attraper un objet) ou pour les éviter (obstacles).
On a déjà présenté l’outil open source "Open CV", bibliothèque de fonctions développées par Intel avant d’être mises à disposition de la communauté. Aujourd’hui, c’est au tour d’Harpia d’attirer notre attention.
Site officiel d’Harpia
Open CV nécessite de bien connaitre la programmation C et le (…) -
 Open Silicium n°2 cite Pobot
Open Silicium n°2 cite Pobot
4 avril 2011, par Julien H.Ce vendredi 1er avril 2011, le club fêtait à sa manière (crêpes et démonstrations de robots) la sortie du deuxième numéro de Open Silicium, magazine trimestriel traitant du matériel open source et de ses applications.
Tandis que le premier numéro faisait la part belle à la Mini2440 (ARM9 de Samsung) déjà consacrée par Pobot depuis un an, le numéro d’avril-mai-juin 2011 traite de l’Arduino, une autre carte de développement open source bien connue des participants à nos ateliers.
Référence (…)
