 PoBot
PoBot
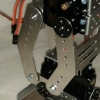
Notre robot bipède est désormais équipé d’une carte Arduino qui contrôle les 4 servomoteurs en microsecondes et pas en degrés : cela permet des mouvements beaucoup plus fluides.
Accueil > Mots-clés > Culture générale > humanoïde
humanoïde
On appelle "humanoïde" un robot ayant l’apparence d’un homme, soit deux pieds, deux jambes, un torse et une tête. C’est une partie de la robotique en plein développement, à cause de la robotique de services (par opposition à l’industrie) qui trouve des premiers débouchés dans l’assistance aux personnes.
Nous construisons de temps en temps des robots humanoïdes, mais c’est surtout l’étude de la marche bipède qui nous motive.
Articles
-
 Logiciel d’un robot bipède
Logiciel d’un robot bipède
17 novembre 2013, par Julien H. -
 Parallel Leg Mechanism
Parallel Leg Mechanism
25 avril 2011, par Julien H.Nous avons expérimenté la marche bipède d’un robot avec notre premier humanoïde "Easy Bipède". On a pu constater la difficulté d’obtenir des déplacements rapides quand on a peu de degrés de liberté : le poids du robot et l’impossibilité de faire baisser le centre de gravité en dessous de la hanche rendait nécessaire une décomposition en plusieurs étapes statiques.
Il est donc tentant de mettre beaucoup de moteurs sur les jambes d’un robot, pour avoir plus de positions possibles. Mais cela (…) -
 Robot bipède Easyrobotics
Robot bipède Easyrobotics
28 octobre 2009, par Julien H.Voici la présentation du premier robot bipède utilisé par le club. Il ne s’agit pas encore du notre, mais il nous a été prêté par Nicolas, d’Easyrobotics.
Nous en avons construit un second, dédié aux projets du club (donc à vous cher visiteur si vous venez à nos réunions). Voici sa construction en photos :
Présentation générale
Il fait partie de la famille des robots humanoïdes, même s’il n’y a que le bas. Par contre il a bien deux jambes, constituées de pieds fixes (plutôt grands), de (…) -
 Testimonial : how I made my first robot
Testimonial : how I made my first robot
20 January 2011, by Sébastien CornerMy name is Sebastien Corner and I am studying at the University of Virginia Tech in the United States. I am doing a Bachelor in Mechanical Engineering specialized in robotics.
Cursus
Before attending this prestigious university, as lots of French engineering students, I went to French “Class preparatoire” for 2 years and did the first year of an engineering school at the Institut Supérieur d’Électronique et du Numérique ….(ISEN). I learnt a lot in this school but I did not enjoy my (…) -
 Les robots dans la littérature
Les robots dans la littérature
27 novembre 2005, par Gilles S.Historique
La première fois qu’apparaît le terme "Robot", c’est dans la comédie utopique "Rossum Universal Robots" par Karel Capek (1890-1938), docteur en philosophie de l’université de Prague. Le mot robot vient du tchèque roboti, verbe qui signifie travailler de manière pénible, effectuer de lourdes taches.
Dans la pièce, Rossum est un savant qui a découvert une substance chimique semblable au protoplasme, à partir de laquelle il a conçu des êtres appelés robots, qui ressemblent à des (…) -
Famous real robots
26 September 2011, by Julien H.Sébastien is very lucky : first being part of Pobot... but mostly because he is studying robotics in the United States (at Virginia Tech).
He went recently to University of Pennsylvania where he took this photo :
Can you give the name of these famous real robots ? They all are used every day by students and engineers in research & development. -
 RoMeLa de Virginia Tech (USA)
RoMeLa de Virginia Tech (USA)
15 juillet 2011, par Julien H., Sébastien CornerMoins célèbre en France que le MIT de Boston ou que CMU de Pennsylvanie, voici un laboratoire universitaire qui ne manquera pas d’intéresser les roboticiens amateurs : le RoMeLa est le laboratoire de robotique et de mécanique de Virginia Tech, dans l’état du même nom, juste au sud des deux pré-cités.
Le RoMeLa est particulièrement connu à Pobot puisque Sébastien Corner y continue ses études, après deux années à Sophia-Antipolis où il a découvert la robotique mobile avec Pobot en parallèle (…) -
 Exosquelette piloté (2011)
Exosquelette piloté (2011)
27 octobre 2011, par Joël L., Julien H.En observant les évolutions de la robotique ces deux dernières années, on a pu constater que ce qui était impossible avant peut le devenir, parfois à coût très modéré. Partant de ce constat, de nombreux projets menés au club consistent à réaliser des rêves avec des prototypes fonctionnels en peu de temps.
Arriver à supporter les limitations de l’âge ou de la maladie et gagner un peu d’autonomie pour se déplacer est un de ces rêves. Les exosquelettes motorisés sont des machines qui peuvent (…) -
 Limit Cycle Walking
Limit Cycle Walking
22 janvier 2011, par Sébastien CornerThis research is about the Limit Cycle Walking. This concept was presented during the International Conference on Intelligent Robots and Systems (IROS) at Acropolis Convention Center in Nice (France) in 2008.
INRIA’s organization website for IROS’ 2008 -
LIRMM, le laboratoire de robotique de Montpellier
12 juillet 2011, par Julien H.Le Laboratoire d’Informatique, de Robotique et de Microélectronique de Montpellier ou LIRMM est régulièrement cité au club parmi tous les labos de recherche en robotique en France, sans doute parce qu’il partage certains projets avec l’INRIA, le laboratoire d’informatique et d’automatique de Sophia-Antipolis avec lequel Pobot entretient des liens depuis plusieurs années.
Ce laboratoire est à l’origine d’un robot parallèle (voir notre article sur le sujet) très rapide issu du projet Dexter (…)
