 PoBot
PoBot
 Robot bipède Easyrobotics
Robot bipède EasyroboticsVoici la présentation du premier robot bipède utilisé par le club. Il ne s’agit pas encore du notre, mais il nous a été prêté par Nicolas, d’Easyrobotics.
Nous en avons construit un second, dédié aux projets du club (donc à vous cher visiteur si vous venez à nos réunions). Voici sa construction en photos :
Présentation générale
Il fait partie de la famille des robots humanoïdes, même s’il n’y a que le bas. Par contre il a bien deux jambes, constituées de pieds fixes (plutôt grands), de genoux (un servomoteur par jambe) et d’un bassin (rotation des 2 jambes par 1 servomoteur chacune).

De manière assez surprenante, ce robot-tronc aura des yeux, un de chaque côté. Ils permettront juste d’avoir une mesure de la distance au prochain obstacle.
Programmation
On va tout d’abord regarder les différentes positions possibles. Pour cela on va utiliser une petite interface faite maison avec deux grilles : une pour la partie gauche et une pour la partie droite.
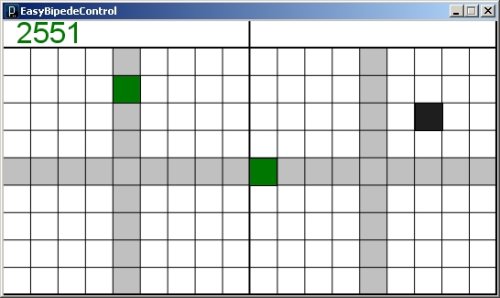
En cliquant sur chacune des cases, on peut commander aussitôt la nouvelle position et ainsi juger de l’équilibre et de la progression. C’est là que les choses se compliquent...
Comme le dit la chanson :
La meilleure façon de marcher
C’est encore la notre
C’est de mettre un pied devant l’autre
Et de recommencer
Pourtant, il ne suffit pas d’envoyer le pied en avant.
Si on observe le déplacement humain, on observe un fonctionnement dit "talon-point" (en anglais "heel-toe" comme on peut observer dans la vidéo de PetMan). Cela permet d’envoyer une force vers l’arrière avec le talon, et selon le principe d’action/réaction, le sol étant le plus fort, il pousse vers l’avant et provoque le mouvement.
On va donc se servir des grands pieds pour reproduire ce fonctionnement. Mais ce n’est pas si simple : il faut de l’équilibre, et on va pallier à ce problème en utilisant l’autre pied.
Voici le résultat (code Arduino pour pilotage par commande type "5555p" et code Processing avec IHM) :

Une fois chacune des positions successives atteintes, on peut passer à l’enchainement dans un programme dédié (toujours en piloté, puis in situ pour être autonome).
Voici un exemple de séquence :
Et enfin il marche !! It’s aliiiiiiive !




