 PoBot
PoBot
Contrôler un robot à distance, quelle idée ! C’est bien plus amusant de le rendre autonome et d’apprendre étape par étape à améliorer son comportement.
Pour ceux qui veulent quand même utiliser une télécommande, autant le faire de manière fun avec un Nunchuck, l’accessoire de la manette Wii qui tient dans le creux de la main, avec quand même un joystick au pouce, deux boutons à l’index et au majeur, et surtout un accéléromètre trois axes.
On connaissait déjà la version classique, avec un (…)
Accueil > Mots-clés > Kits et cartes de développement > Arduino
Arduino
L’Arduino est un concept à la fois matériel (une carte d’entrées/sorties avec un micro-contrôleur programmable) et logiciel (du C++ simplifié mais totalement compatible et une interface utilisateur ultra-simple).
On peut l’utiliser surtout pour du prototype rapide, mais de plus en plus comme solution définitive grâce à différentes formats, du plus pratique au plus compact.
Nous lui consacrons un grand nombre d’articles, à la fois de découverte et de prise en main pour les débutants, mais aussi des exemples d’utilisation dans des robots, des installations domotiques, des œuvres artistiques.
Articles
-
 Contrôle par Nunchuck sans fil
Contrôle par Nunchuck sans fil
30 juin 2011, par Julien H. -
 Echanges maître/esclaves en I2C
Echanges maître/esclaves en I2C
17 mars 2011, par Julien H.Voici un article qui décrit dans plusieurs langages les échanges qu’il faut mettre en œuvre entre deux dispositifs équivalents (deux micro-contrôleurs par exemple) pour une liaison I2C.
Il ne s’agit pas de piloter un périphérique I2C mais de programmer à la fois le maitre et l’esclave, afin d’expliquer les différentes étapes. Pour compléter cet exercice, on utilisera plusieurs langages et si possible plusieurs cibles.
Les principes
Pour établir une communication sur un bus I2C, il faut (…) -
 Capteur "flex sensor" résistif
Capteur "flex sensor" résistif
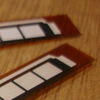
13 janvier 2011, par Julien H.Un capteur de flexion : voilà une utilisation originale des propriétés mécaniques des matériaux conducteurs. Cette fois pour un usage purement robotique puisqu’il s’agit de contrôler des moteurs en fonction de la courbure du capteur.
Le matériel
On utilise un capteur "Flex Sensor" de la société Spectra Symbol : deux fines couches de métal sont séparées par un polymère conducteur qui se déforme quand on le plie, modifiant la résistance aux bornes des deux couches métalliques.
Le capteur (…) -
 Remote control GUI for Arduino
Remote control GUI for Arduino
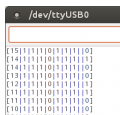
24 September 2011, by Julien H., LoïcLoïc developed a nice graphical user interface for easy access to inputs and outputs of Arduino boards, with even control of servomotors. The transfer protocol is much quicker than Firmata, by using only four bytes. Last but not least, you may record, store and replay sequences of orders at will.
How do you intend to interact with real world using modern interfaces such as Arduino ? Coding autonomous softwares is not so easy for quick & efficient creations. Our solution is using a (…) -
 Le Pendobot (2012)
Le Pendobot (2012)
20 mai 2012, par Julien H.Un tout nouveau robot entièrement conçu au club, tant pour sa structure mécanique que pour sa carte de contrôle : le Pendobot est un robot à équilibrage dynamique.
Ses deux roues soutiennent la structure en pendule inversé. Il n’y a donc pas de troisième point d’appui (habituellement constitué d’une roue folle ou d’un patin) ce qui fait que le robot est en équilibre instable.
Histoire
L’intérêt pour les pendules inversés a déjà plusieurs années, lorsque les premiers robots Lego (…) -
 DFRduino RoMeo Rev1.1
DFRduino RoMeo Rev1.1
24 juin 2012, par Eric P., Julien H.Nous avions testé la RoMeo peu après sa sortie en 2008, et plusieurs de nos robots l’utilisent, comme le Tankobot, Baba, Roverduino.
Une nouvelle version est sortie en 2011, et nous découvrons ses fonctionnalités.
Attention, une version 2.0 est sortie en 2013, et elle est très différente.
La carte RoMeo est une adaptation pour le contrôle de moteurs à courant continu et le prototypage rapide de la célèbre Arduino. C’est un modèle désormais connu et répandu, car malgré ses plus grandes (…) -
 Soucoupe contrôlée à distance
Soucoupe contrôlée à distance
26 septembre 2012, par Julien H.Notre plate-forme flottante est opérationnelle depuis plusieurs mois, et les tests de flottaison sont concluants.
Les circuits ne sont pas encore fixés dans la sculpture unique qui couvrira l’ensemble, d’où l’allure globale du montage :
Avant de procéder à l’asservissement automatique, voici un programme permettant de la contrôler à distance, de recevoir les valeurs internes de différentes variables et surtout... de ramener la soucoupe à bon port quand elle se retrouvera en plein milieu (…) -
 Accostage sur dock de rechargement ROOMBA
Accostage sur dock de rechargement ROOMBA
17 mai 2011, par Frédéric BernatAlgorithme de docking pour recharger les batteries d’un robot
-
 Interruptions externes
Interruptions externes
23 novembre 2009, par Julien H.Nous allons voir dans cet article l’exploitation d’entrées numériques particulières d’un micro-contrôleur, appelées "interruptions externes".
Cet article va utiliser l’Arduino donc c’est une utilisation simplifiée. Un autre article de ce site est dédié aux microcontrôleurs par une approche plus bas-niveau : Trucs et astuces.
Définition
Il s’agit d’une connexion particulière dans le micro-contrôleur qui va interrompre l’exécution de votre code principal lorsqu’un changement est détecté (…) -
 Logiciel d’un robot bipède
Logiciel d’un robot bipède
17 novembre 2013, par Julien H.Notre robot bipède est désormais équipé d’une carte Arduino qui contrôle les 4 servomoteurs en microsecondes et pas en degrés : cela permet des mouvements beaucoup plus fluides.
