 PoBot
PoBot
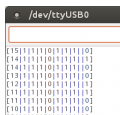
Loïc a développé une interface utilisateur très simple mais complète pour les cartes Arduino. Il a développé son propre protocole sur quatre octets seulement, permettant une plus grande vitesse que Firmata. Des fonctionnalités étendues (enregistrement, stockage, chargement de fichiers) font de cette IHM une des meilleures qu’on puisse trouver. Cet avis n’engage que moi (Julien) mais je laisse le soin à Loïc de vous présenter son travail afin de vous en convaincre :
Comment introduire le (…)
Accueil > Mots-clés > Kits et cartes de développement > Arduino
Arduino
L’Arduino est un concept à la fois matériel (une carte d’entrées/sorties avec un micro-contrôleur programmable) et logiciel (du C++ simplifié mais totalement compatible et une interface utilisateur ultra-simple).
On peut l’utiliser surtout pour du prototype rapide, mais de plus en plus comme solution définitive grâce à différentes formats, du plus pratique au plus compact.
Nous lui consacrons un grand nombre d’articles, à la fois de découverte et de prise en main pour les débutants, mais aussi des exemples d’utilisation dans des robots, des installations domotiques, des œuvres artistiques.
Articles
-
 Une interface IHM pour Arduino
Une interface IHM pour Arduino
18 septembre 2011, par Loïc -
 Construire une voiture télécommandée
Construire une voiture télécommandée
28 novembre 2015, par Pierre M.Une Arduino pilote une voiture télécommandée
-
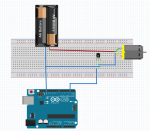
 Asservissement d’un moteur à courant continu
Asservissement d’un moteur à courant continu
8 octobre 2014, par Benoit T.Etudiant à l’EIGSI, école d’ingénieurs généraliste, j’ai choisi pour projet de première année l’élaboration d’un montage ludique permettant de montrer simplement le fonctionnement d’un asservissement. Je reprends dans cet article toutes les étapes qui m’ont permis d’y arriver.
-
 Flasher le bootloader d’une carte Arduino
Flasher le bootloader d’une carte Arduino
8 janvier 2014, par Gilles O.J’ai tout cassé ma belle carte Arduino Leonardo (un clone en fait), elle ne fonctionne plus. Elle n’est plus reconnue sur le port USB, c’est la cata. C’était ma première en plus, elle avait une certaine valeur sentimentale...
J’en ai parlé à Julien qui m’a dit qu’il restait une ultime chance : tenter de reprogrammer le logiciel de démarrage (bootloader) dans la puce de la carte, on ne sait jamais... Et là il plonge la main dans un carton et me sort un programmateur USB pour AVR de derrière (…) -
 Débuter avec une carte Arduino
Débuter avec une carte Arduino
11 octobre 2008, par Julien H.Arduino est une carte programmable open-source devenue un standard de fait pour ses extensions pratiques pour la robotique ludique et les montages électroniques amateurs. C’est simple, c’est pratique et nous sommes là pour vous aider !
La famille Arduino est apparue en 2006 sous forme d’une carte programmable avec un port série. Puis de nouvelles versions sont apparues, toujours aussi simples, avec différents formats : petites, grandes, plus puissantes, plus économiques, avec USB, avec (…) -
Contrôle de ruban de leds par Arduino
20 mai 2013, par Audrick F.Retour d’expérience de controle de ruban ledstrip sur le Drikybot
-
 CerBac, un robot Arduino (2009)
CerBac, un robot Arduino (2009)
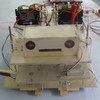
19 janvier 2011, par Sébastien CornerUn robot mobile autonome conçu et réalisé dans le cadre de mes études en robotique.
Le matériel utilisé est le suivant : moteurs pas-à-pas bipolaire à 200 pas par tour, en taille NEMA17. roues de roller, poulies et courroies crantées drivers de moteurs M325 de Soprolec carte électronique programmable Arduino Duemilanove caméra à détection de couleur et de forme Pob-Eye 2 du français Pob-Technology mécanique en aluminium et plexiglas, architecturé par des tiges filetées batteries Lithium (…) -
 LCD sur I2C simplement
LCD sur I2C simplement
25 septembre 2011, par Julien H.Le prix des afficheurs à cristaux liquides est en baisse, et il est de plus en plus fréquent de trouver des circuits de commande simples, évitant la gestion du protocole et économisant surtout le nombre de pattes d’entrée/sortie nécessaires. Georges utilise pour son projet un LCD sur bus I2C à base de PCF8574 dont voici la mise en œuvre.
Il y autant de circuits de communication avec un écran LCD que de contrôleurs de LCD. Deux possibilités de se retrouver bloquer par un manque de (…) -
 Odométrie du Pobot Easy
Odométrie du Pobot Easy
28 février 2009, par Julien H.Un capteur de lumière permet de détecter une alternance noir/blanc sur une roue et d’en déduire son avancée (position, vitesse).
-
 Soucoupe contrôlée à distance
Soucoupe contrôlée à distance
26 septembre 2012, par Julien H.Notre plate-forme flottante est opérationnelle depuis plusieurs mois, et les tests de flottaison sont concluants.
Les circuits ne sont pas encore fixés dans la sculpture unique qui couvrira l’ensemble, d’où l’allure globale du montage :
Avant de procéder à l’asservissement automatique, voici un programme permettant de la contrôler à distance, de recevoir les valeurs internes de différentes variables et surtout... de ramener la soucoupe à bon port quand elle se retrouvera en plein milieu (…)
