 PoBot
PoBot
 Le Tankobot (2012)
Le Tankobot (2012)Basé sur un châssis RP-5 offert par Zartronic, le Tankobot est un robot d’études mis au point grâce aux participants des ateliers hebdomadaires de l’association Pobot.
En 2013, il a été équipé d’une tourelle à 3 capteurs ultrasons.

Mécanique
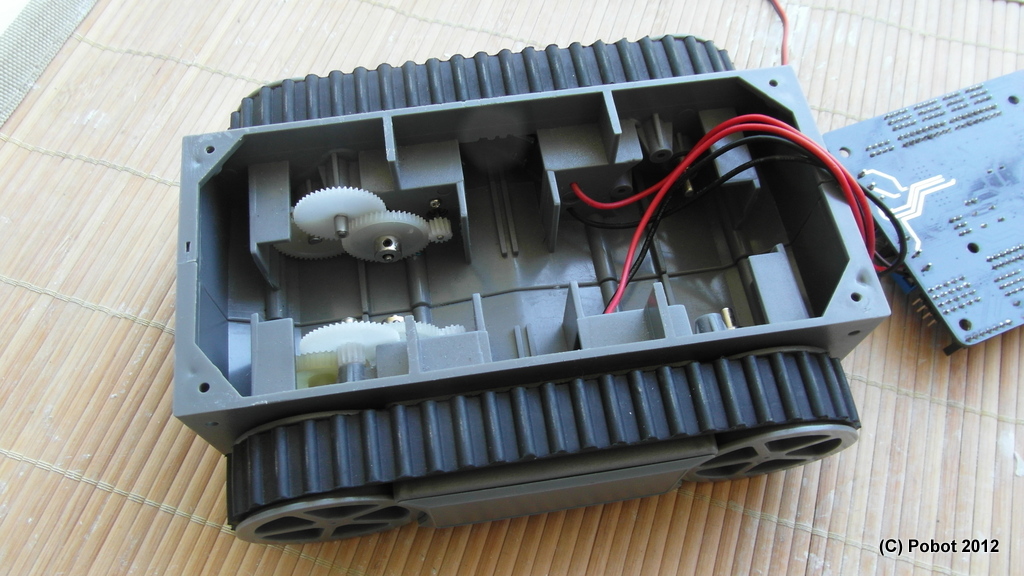
Les deux chenilles du robot sont mises en mouvement par deux moteurs à courant continu. Le couple à vide est suffisant pour faire grimper une table à 60°. Le franchissement d’obstacles (tapis, bas de porte, gravier) sera un des sujets d’étude de ce petit robot.
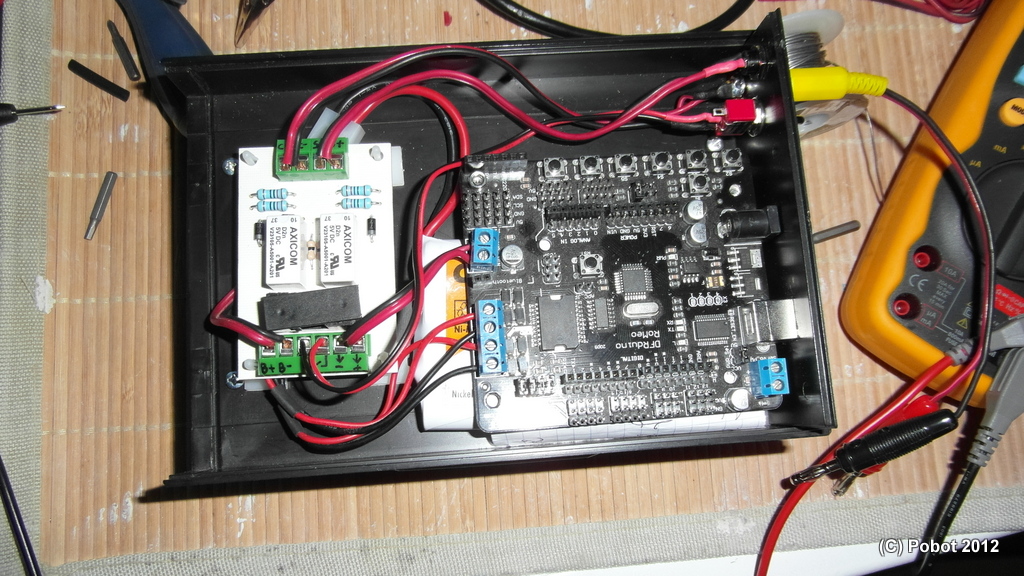
Un boîtier plastique permet de protéger les cartes électroniques, la batterie et les connecteurs. Le boîtier est travaillé à la fraiseuse numérique pour laisser sortir le connecteur USB de la carte programmable, ainsi que le connecteur d’alimentation externe et le connecteur de recharge de la batterie.
L’intérieur du châssis RP-5 permet d’accueillir un bloc de piles que nous n’utiliserons pas, laissant ainsi de la place pour des capteurs situés sous le châssis, pour du suivi de ligne, ou pour de l’odométrie.
La batterie utilisée est un pack Ni-MH 9,6 volts de bonne capacité (2000 mAh) disponible chez Gotronic. Plus simple que du Li-ion ou du Li-PO, et suffisant pour notre usage.

Le dessus du robot est plat, permettant d’y fixer d’autres cartes et d’autres montages.
Électronique
La carte programmable choisie pour l’instant est une Romeo de DFRobot, clone de l’Arduino avec un ATmega328 et un circuit de contrôle de puissance L298 (pont en H) utilisé pour piloter les deux moteurs à courant continu.
Pour s’y connecter et envoyer un nouveau programme, il faut donc utiliser le profil "Arduino Duemilanove w/ ATmega32" et sélectionner le bon port série (sous Linux : /dev/ttyUSB0 par exemple) dans le menu "Outils" du logiciel Arduino.
Mais la carte la plus intéressante est un circuit de changement automatique de l’alimentation, réalisé par Stephan après avoir constaté les difficultés de branchement si on devait conserver la batterie, le chargeur, l’alimentation externe, le bornier d’alimentation de la carte électronique.
Comme nos autres projets, ce robot est destiné à servir à chaque adhérent participant à nos ateliers pour des expérimentations courtes ou des challenges plus importants.
Un exemple parmi d’autres de sa convivialité : on peut allumer les moteurs même quand un programme est en train de tourner, ce qui permet un debug très agréable, en plein milieu d’un algorithme.
Identification des entrées/sorties
A vérifier suite aux modifications de la tourelle à capteurs ultrasons.
| Patte | Utilisation |
| D0 | liaison série |
| D1 | liaison série |
| D2 | interruption codeur gauche |
| D3 | interruption codeur droit |
| D4 | sens du moteur 1 |
| D5 | vitesse du moteur 1 |
| D6 | vitesse du moteur 2 |
| D7 | sens du moteur 2 |
| D8 | activation des lumières du capteur de ligne |
| D9 | récepteur gauche du capteur de ligne |
| D10 | récepteur droit du capteur de ligne |
| D11 | capteur de présence gauche |
| D12 | capteur de présence droit |
| D13 | diode témoin à usage libre |
Utilisation
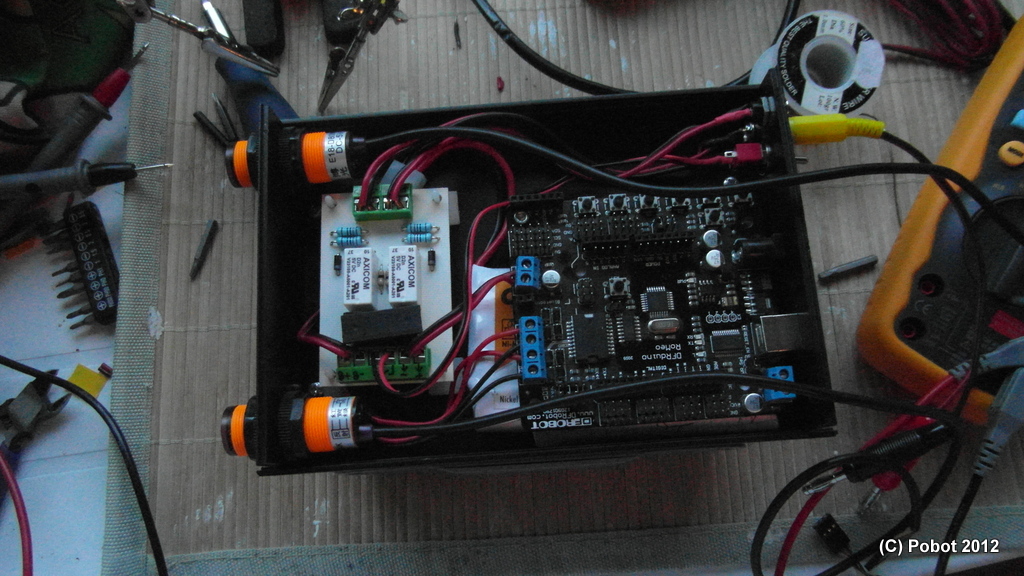
Deux capteurs infra-rouge permettent de détecter les obstacles à grande distance (80 cm), économiques et facilement disponibles (merci à Zartronic pour le matériel) :

Ce sont les mêmes capteurs que sur Nono le Parlobot, la Soucoupe Terro Navale, le Roverbot de Loïc, etc...
Sorties officielles
Le robot a été utilisé pour les exposés sur les robots mobiles pour un stage MathsC2+ avec l’INRIA Sophia-Antipolis en juin 2012.
En octobre 2014, il sert également comme "drone FLY radar" pour un projet d’élèves de 1ère S au Centre International de Valbonne.
Construction


Note : le marteau ne sert qu’à pointer les endroits à percer, il est déconseillé de s’en servir pour assembler les pièces. Non, le marteau n’est pas un tournevis rapide !

Juste pour le plaisir, le plus gros forêt jamais utilisé (à ma connaissance) pour construire un robot du club :

Il ne faut pas négliger le câblage, c’est sans doute ce qui aura pris le plus de temps pour assembler toutes les pièces du robot. Il ne faut rien oublier, notamment enfiler les bouts de gaine thermorétractable avant de souder les fils, et passer les écrous avant de fixer le connecteur au châssis.
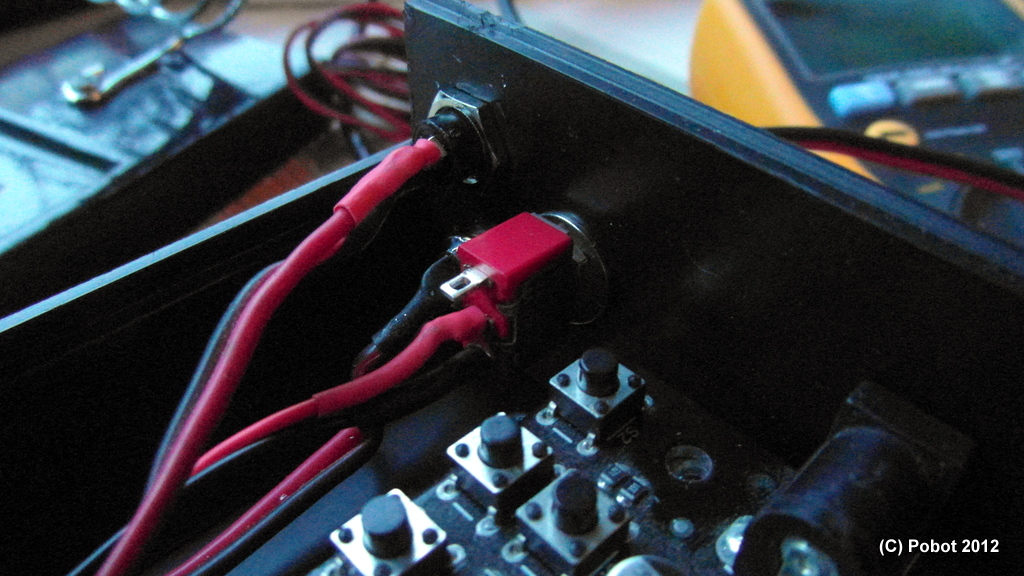
Un câblage bien réalisé, c’est autant de temps gagné lors de la mise au point du robot, et cela évite les accidents en cours d’utilisation.
Tests
Comme ce robot est destiné à des présentations publiques et des ateliers avec des jeunes (MathsC2+ à l’INRIA), autant le faire tester par le plus jeune roboticien disponible.

Résultat : un engrenage s’avère mal fixé, il faudra le coller. Cette opération sera réalisée lors de la fixation des capteurs à fourche optique assurant l’odométrie des chenilles.
Consultez notre article sur les fourches optiques pour découvrir les détails.
Amélioration : codeurs optiques
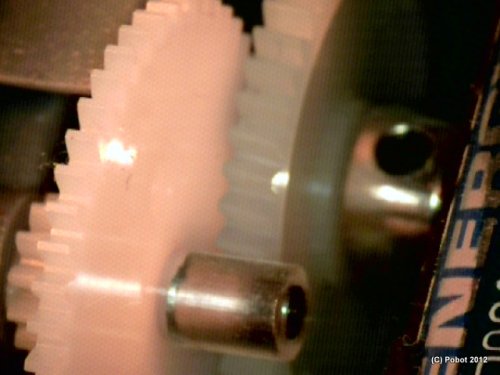
Les engrenages à l’intérieur du châssis sont percés d’un trou. Une fourche optique permet de détecter le passage de ce trou : en forme de U, chaque branche est équipée d’un composant, soit une led émettrice, soit un récepteur de même fréquence lumineuse (infra-rouge dans notre cas).
En faisant beaucoup de récupérations d’imprimantes et de photo-copieurs, nous avons à disposition un stock gigantesque de ce type de capteurs. Il n’était donc pas compliqué d’en trouver une paire identique, et nous avons même trouvé des capteurs avec leurs câbles et un connecteur.
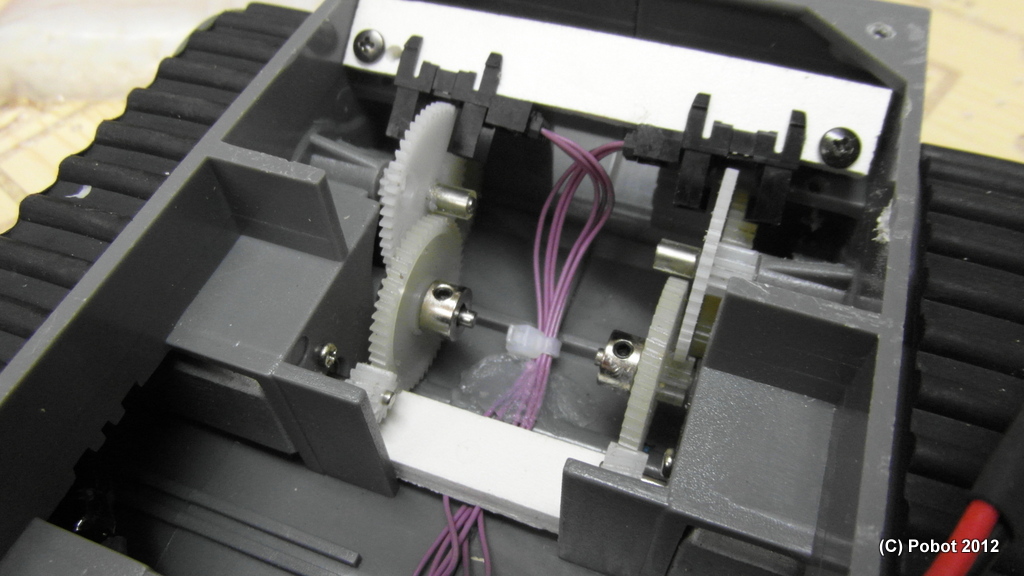
Après avoir repéré les fils et détecté où se trouvait l’émetteur et le récepteur (voir notre article sur le DCA55), on a découpé une plaque fine de PVC pour y coller les capteurs et visser dans le châssis.
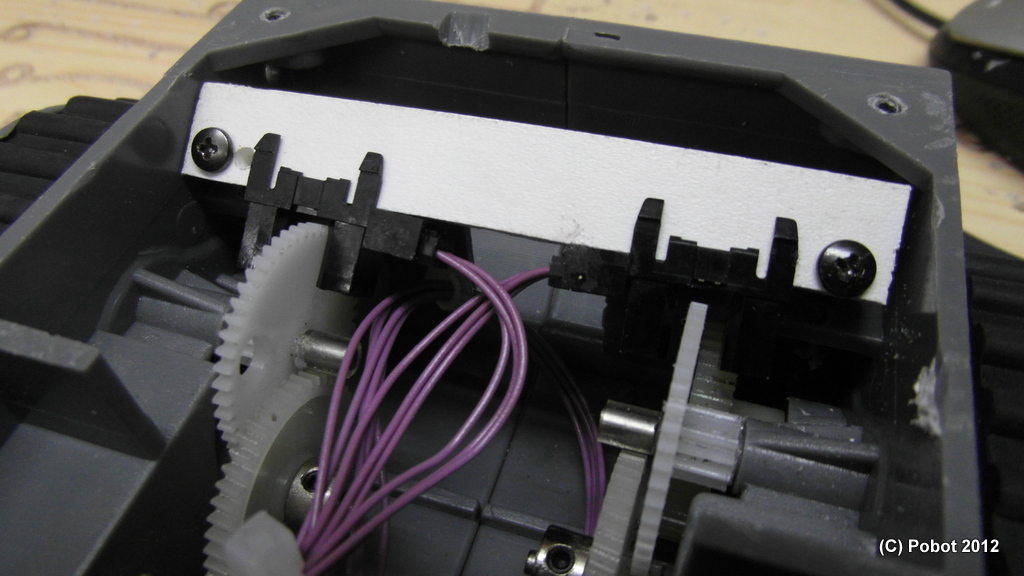
Puis une boule de mastic colle Rubson au fond du châssis pour tenir les fils et c’est terminé :
Amélioration : détection de lignes
Une modification plus importante : perçage d’une ligne sous le châssis pour permettre le passage des câbles d’une barre de capteurs Pololu.
Amélioration : tourelle à ultrasons
Les 3 capteurs sont reliés par 2 fils chacun :
– 1 fil TRIG (déclenchement)
– 1 fil ECHO
On utilise ces capteurs avec la bibliothèque "NewPing" de Tom Eckel.
Les pattes utilisées sont du côté analogique. Il y a donc une adaptation de numérotation nécessaire pour utiliser ces pattes en signaux numériques tout ou rien :
En début de code Arduino, on définit les raccourcis suivants :
#define trigG 15
#define trigM 17
#define trigD 19
#define echoG 14
#define echoM 16
#define echoD 18En effet, Analog 0 = Digital 14 et Analog 5 = Digital 19.
Nous n’avons pas testé le fait d’utiliser une seule patte "TRIG" pour les 3 capteurs. Si on déclenche les 3 capteurs en même temps, on prend le risque d’avoir des échos parasites, c’est pour ça qu’il faut mieux utiliser la bibliothèque de code qui gère ces deux pattes, l’une en sortie (TRIG) pour mettre en fonctionnement le capteur ultrason, et l’une en entrée de l’Arduino (ECHO) pour recevoir le signal sur une certaine durée dépendant à la distance mesurée.





Vos commentaires
# Le 10 février 2014 à 19:18, par Nathan En réponse à : Le Tankobot (2012)
En réponse à : Le Tankobot (2012)
comment le fabriquer ?
a quel prix ?
# Le 10 février 2014 à 23:07, par Eric P. En réponse à : Le Tankobot (2012)
En réponse à : Le Tankobot (2012)
Tout est expliqué dans l’article. Il faut prendre la peine de le lire.
Quant au prix, nous n’avons pas pris la peine de faire l’addition au fur et à mesure. Et nous ne sommes pas une boutique en ligne ;)
Répondre à ce message