PoBot
PoBot
 Fourche optique pour codeur simple
Fourche optique pour codeur simpleDans notre robot à chenilles Tankobot, les engrenages sont percés d’un trou. Cela permet de détecter un tour de roue (seulement, soit 4 centimètres de parcours) et c’est déjà intéressant, ne serait-ce que pour synchroniser les deux chenilles entre elles.
Dans ce cas précis, le meilleur composant est la fourche optique, telle qu’on peut en récupérer en pagaille dans les imprimantes et les photocopieurs cassés. Il en existe de différentes tailles, et avec un peu de recherche vous trouverez la paire de capteurs identiques qui vous conviendra.
Ces fourches sont composées d’un émetteur et d’un récepteur, comme tout capteur optique. La lumière est généralement infra-rouge (donc invisible).
En utilisant notre analyseur de composant DCA55, nous avons mesuré deux valeurs très importantes pour alimenter la led du capteur :
– la tension de passage dans la diode : 1,13 volts
– le courant de test : 4,23 mA

Comme nous disposons d’une tension de 3,3 volts sur le robot, il va falloir utiliser une résistance pour fournir la bonne tension à la diode électroluminescente émettrice.
Pour qu’il ne reste que 1,13 volts en entrée de la diode, la tension au borne de la résistance doit être de :
tension d'entrée - tension de la diode
Ue - Ud
3,3 - 1,13
2,17 voltsLe courant qui va être tiré par la diode étant connu, la résistance doit être de :
U = R * I donc R = U / I
R = 2,17 / 0,00423
R = 513 ohmsComme les résistances ont des valeurs standards en fonction de leur qualité (précision à 5%, 10%, ...), la valeur la plus proche dans le stock disponible est de 680 ohms.
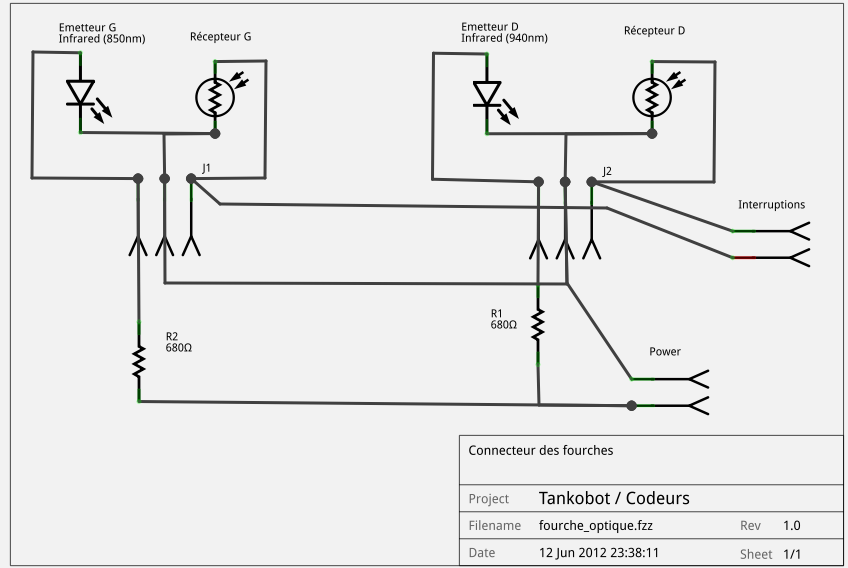
Le schéma suivant est un peu compliqué, car il se base sur un connecteur existant. Il ne sera pas conservé mais autant avoir sous les yeux les changements à faire au moment de souder.