 PoBot
PoBot
Etudiant à l’EIGSI, école d’ingénieurs généraliste, j’ai choisi pour projet de première année l’élaboration d’un montage ludique permettant de montrer simplement le fonctionnement d’un asservissement. Je reprends dans cet article toutes les étapes qui m’ont permis d’y arriver.
Accueil > Mots-clés > Composants > pont en H
pont en H
Ce joli nom désigne un circuit de contrôle de puissance utilisé pour modifier le courant passant dans un moteur : à la fois comme interrupteur, mais avec l’avantage de pouvoir modifier le sens du courant, ce qui permet de contrôler le sens de rotation.
Le H désigne la forme schématique du circuit : on place le moteur sur la barre horizontale, et les quatre pattes verticales du H sont des interrupteurs que le pont va laisser passer ou fermer selon les consignes envoyées par le circuit de commande logique (votre programme).
Il existe différents circuits intégrés réalisant les fonctions d’un pont en H, que nous choisissons selon la puissance nécessaire, la facilité de commande et les fonctions spéciales souhaitées.
Articles
-
 Asservissement d’un moteur à courant continu
Asservissement d’un moteur à courant continu
8 octobre 2014, par Benoit T. -
 Contrôleur "pont en H" pour moteurs électriques
Contrôleur "pont en H" pour moteurs électriques
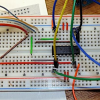
14 décembre 2009, par Julien H.Avec un seul circuit de type pont en H (L293 ou SN754410), on peut contrôler deux moteurs à courant continu ou un seul moteur pas à pas à deux phases. C’est ce que nous avons fait lors de nos ateliers hebdomadaires et que nous vous présentons ici.
Le but de cet article est de reproduire rapidement une expérience simple : faire tourner un moteur électrique à courant continu ou un moteur pas-à-pas (tels que ceux qu’on récupère dans des imprimantes) avec un composant simple et peu cher. Bien (…) -
 Projet Barjallo : comment contrôler un moteur à courant continu ?
Projet Barjallo : comment contrôler un moteur à courant continu ?
16 mars 2014, par Frédéric R., Jean B.Cet article présente le projet "Barjallo" consacré aux ponts en H et au fonctionnement du transistor
-
 Le Tankobot (2012)
Le Tankobot (2012)
19 mai 2012, par Julien H.Ce robot permet de faire des tests rapides d’algorithmes. Il a été conçu pour être très pratique et pouvoir servir à de nombreux ateliers. Il est donc robuste et simple.
Basé sur un châssis RP-5 offert par Zartronic, le Tankobot est un robot d’études mis au point grâce aux participants des ateliers hebdomadaires de l’association Pobot.
En 2013, il a été équipé d’une tourelle à 3 capteurs ultrasons. Mécanique
Les deux chenilles du robot sont mises en mouvement par deux moteurs à (…) -
 DFRduino RoMeo Rev1.1
DFRduino RoMeo Rev1.1
24 juin 2012, par Eric P., Julien H.Nous avions testé la RoMeo peu après sa sortie en 2008, et plusieurs de nos robots l’utilisent, comme le Tankobot, Baba, Roverduino.
Une nouvelle version est sortie en 2011, et nous découvrons ses fonctionnalités.
Attention, une version 2.0 est sortie en 2013, et elle est très différente.
La carte RoMeo est une adaptation pour le contrôle de moteurs à courant continu et le prototypage rapide de la célèbre Arduino. C’est un modèle désormais connu et répandu, car malgré ses plus grandes (…) -
 Moteur pas-à-pas 5 phases avec deux ponts L298
Moteur pas-à-pas 5 phases avec deux ponts L298
22 avril 2012, par Julien H.Nous avons récupéré des moteurs pas à pas à 5 fils. Voici un montage permettant de le contrôler avec deux circuits intégrés L298 (double demi-pont en H).
A première vue, rien de bien sorcier, car généralement un pas à pas à 5 fils est un moteur unipolaire double phases, avec un fil comme point milieu commun aux deux bobines, et un fil par extrémité de bobine.
Mais ici le cas est plus particulier, car il s’agit en fait de moteurs à 5 phases (soit 5 bobines). Les bobines sont connectées (…) -
 Electroaimant avec un pont en H
Electroaimant avec un pont en H
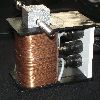
20 mars 2013, par Julien H.Une bobine peut servir d’électroaimant lorsqu’on l’alimente. Dans le cadre d’un TIPE, nous avons aidé deux étudiants de classes préparatoires aux grandes écoles du CIV à Valbonne et des Eucalyptus à Nice.
Afin de simplifier le contrôle du courant et la polarisation magnétique de la bobine, nous leur avons conseillé d’utiliser un pont en H, en l’occurrence le L298 inclus sur la carte Roméo de DFRobot (compatible Arduino).
En quelques minutes, en reprenant l’un des nombreux codes existant (…) -
 Driver de moteur pas à pas
Driver de moteur pas à pas
2 février 2006, par Gilles S.Cette carte est conçue de façon à pouvoir gérer plusieurs type de driver moteurs : Les L298 de ST : celui-ci plus est une simple interface de puissance, et est prévu pour être géré par un L297. Cependant, le µC peut le gérer directement (via cinq signaux : 4 indiquant les polarités aux bornes du moteur et un signal enable), en faisant attention à ne pas le surcharger (par exemple en laissant la patte enable active alors que le moteur ne tourne pas). Une petite carte utilisant deux de ces (…)
-
 Un premier robot en plexiglas
Un premier robot en plexiglas
19 juin 2011, par Guillaume M.Fin 2009, nous avions été contacté par un élève ingénieur en Génie Mécanique à l’UTC (Université de Technologie de Compiègne). Nous lui avions conseillé le plexiglas qu’on trouve en chutes à bas prix dans les grandes surfaces de bricolage.
Depuis, le robot a bien avancé et son créateur Guillaume est désormais étudiant de troisième cycle en Angleterre à Cranfield University dans le domaine des véhicules autonomes : Autonomous Vehicle Dynamics and Control (site d’information).
Il nous (…) -
 DonkeyBot
DonkeyBot
17 novembre 2012, par Eric P.Quelques informations sur DonkeyBot, le robot mulet que vous devrez éviter dans l’épreuve n°3
