 PoBot
PoBot
Qu’est-ce qu’un moteur pas à pas ? Comment le piloter ? Découverte des principes généraux
Les moteurs pas-à-pas sont disponibles assez facilement dans les magasins d’électroniques, à faible prix. Ces modèles courants sont des moteurs à aimant permanent. Ce sont ceux dont nous parlerons dans cet article.
Retrouvez une rubrique complète sur les contrôleurs de moteurs
Moteurs unipolaires et bipolaires
Les moteurs pas-à-pas à aimant permanent courant sont bi-phases : ils sont constitués (…)
Accueil > Mots-clés > Composants > contrôleur de puissance
contrôleur de puissance
Un contrôleur de puissance est un circuit électronique dédié à la gestion des tensions et/ou des courants qui alimentent un élément particulièrement consommateur d’énergie : moteur, lumière.
Il est nécessaire dans plusieurs situations :
– dès qu’on ne peut plus utiliser le courant du circuit logique (leds fortes)
– dès que le contrôle de la tension ou du courant est complexe (moteurs)
Articles
-
 Les moteurs pas-à-pas
Les moteurs pas-à-pas
26 août 2010, par Keuronde -
 Moteur pas-à-pas piloté par GPIO du Raspberry Pi
Moteur pas-à-pas piloté par GPIO du Raspberry Pi
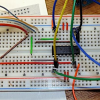
24 février 2013, par Frédéric R.Je sais à présent piloter un moteur pas à pas depuis mon Raspberry pi directement (en utilisant les ports GPIO).
Pour ceux qui seraient intéressés, voici comment j’ai procédé Théorie sur les moteurs pas à pas Piloter un moteur pas à pas (via un CI L293D) avec une Arduino Programme Arduino Théorie du GPIO de la Raspberry Pi Assemblage de LEDs pilotées par la Raspberry Allumer 4 LEDs avec un script en Python Utilisation de la bibliothèque WiringPi en C Programmation du pilote en C (…) -
 Contrôleur "pont en H" pour moteurs électriques
Contrôleur "pont en H" pour moteurs électriques
14 décembre 2009, par Julien H.Avec un seul circuit de type pont en H (L293 ou SN754410), on peut contrôler deux moteurs à courant continu ou un seul moteur pas à pas à deux phases. C’est ce que nous avons fait lors de nos ateliers hebdomadaires et que nous vous présentons ici.
Le but de cet article est de reproduire rapidement une expérience simple : faire tourner un moteur électrique à courant continu ou un moteur pas-à-pas (tels que ceux qu’on récupère dans des imprimantes) avec un composant simple et peu cher. Bien (…) -
 Moteur pas-à-pas piloté par un shield L293
Moteur pas-à-pas piloté par un shield L293
27 décembre 2012, par Julien H.Les contrôleurs de moteur pas-à-pas comme le L293 reproduisent avec une tension d’alimentation spécifique (plus élevée, avec un courant disponible plus important) les consignes transmises depuis un contrôleur avec une tension plus faible (3.3 volts ou 5 volts et surtout un courant faible).
La difficulté présentée ici provient de l’électronique ajoutée dans la conception des cartes d’extension qui facilitent la connexion. Pour éviter d’avoir à gérer 6 signaux (deux "Enable" qui activent ou (…) -
 Le Tankobot (2012)
Le Tankobot (2012)
19 mai 2012, par Julien H.Ce robot permet de faire des tests rapides d’algorithmes. Il a été conçu pour être très pratique et pouvoir servir à de nombreux ateliers. Il est donc robuste et simple.
Basé sur un châssis RP-5 offert par Zartronic, le Tankobot est un robot d’études mis au point grâce aux participants des ateliers hebdomadaires de l’association Pobot.
En 2013, il a été équipé d’une tourelle à 3 capteurs ultrasons. Mécanique
Les deux chenilles du robot sont mises en mouvement par deux moteurs à (…) -
 Bouge ton servo
Bouge ton servo
2 décembre 2005, par Eric P.Non, non, il n’y a aucune faute d’orthographe dans ce titre...
La manip d’aujourd’hui montre comment il est possible de piloter un ou plusieurs servo-moteurs depuis notre ATmega8, et ainsi être en mesure d’actionner des éléments méacaniques. Il s’agit d’un grand classique dans le monde de la robotique et des micro-contrôleurs.
Petit préliminaire
Pour ceux qui ignorent ce qu’est un servo-moteur (ou servo pour les intimes), tout d’abord je tiens à leur dire qu’il n’y a pas lieu d’en (…) -
 Benchmark du dSpin pour R2-D2
Benchmark du dSpin pour R2-D2
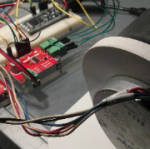
19 août 2012, par Julien H.Nous allons utiliser des drivers dSPIN avec la puce L6470 de ST Microelectronics. Ils ont été présentés par Éric dans cet article.
Plutôt gros le moteur, non ? C’est un Step-Syn 03-820-26 de SANYO qui fait 85 mm de diamètre.
Cet article décrit comment adapter les paramètres électriques aux caractéristiques des moteurs, et ensuite à régler les paramètres d’accélération et de vitesse à la structure mécanique de R2-D2, notamment les effets de son poids et de son centre de gravité.
La (…) -
 Évitement d’obstacles et de chutes de R2-D2
Évitement d’obstacles et de chutes de R2-D2
10 août 2012, par Julien H.Lors de la conception du robot droïde, la priorité a été mise sur la sécurité. Il s’agit d’un robot mobile autonome de plus d’un mètre de haut, pesant plus qu’un enfant de même taille. Il est donc primordial qu’il puisse s’arrêter de lui même en cas de problème : collision, perte d’équilibre, voire chute.
La solution ne peut pas simplement être un bouton d’arrêt d’urgence : nous n’aurons pas forcément accès au robot. Cela ne peut pas non plus être une télécommande : la personne qui la (…) -
 DonkeyBot
DonkeyBot
17 novembre 2012, par Eric P.Quelques informations sur DonkeyBot, le robot mulet que vous devrez éviter dans l’épreuve n°3
-
 Moteur pas-à-pas 5 phases avec deux ponts L298
Moteur pas-à-pas 5 phases avec deux ponts L298
22 avril 2012, par Julien H.Nous avons récupéré des moteurs pas à pas à 5 fils. Voici un montage permettant de le contrôler avec deux circuits intégrés L298 (double demi-pont en H).
A première vue, rien de bien sorcier, car généralement un pas à pas à 5 fils est un moteur unipolaire double phases, avec un fil comme point milieu commun aux deux bobines, et un fil par extrémité de bobine.
Mais ici le cas est plus particulier, car il s’agit en fait de moteurs à 5 phases (soit 5 bobines). Les bobines sont connectées (…)
