 PoBot
PoBot
On va pouvoir piloter le robot à distance avec les modules XBee. Une bonne occasion de faire un peu de télémétrie pour recevoir les différents événements qui se produisent à bord.
L’idée est d’installer sur ordinateur tout un tas de petites applets de visualisation : consignes de vitesse, vitesses des servomoteurs, positionnement par odométrie, vision par capteurs Sharp, etc...
Premier essai
On aura pour commencer : la production des consignes de vitesse, grâce à notre panneau de (…)
Accueil > Mots-clés > Intelligence artificielle > IA
IA
Ces deux lettres (et leur miroir AI en anglais) désignent l’intelligence artificielle. Popularisée par les films de science-fiction, cette discipline n’en est pas moins une réalité scientifique depuis les années 60.
Il s’agit de mettre en œuvre des moyens informatiques pour la résolution de problèmes de manière la plus automatique possible : que la machine trouve une solution (et tant qu’à faire, la meilleure) sans que celle-ci ait été prévue par les programmeurs du système.
Pour nous, il s’agit d’implémenter dans le programme d’un robot une coordination d’actions et de réactions selon une logique inventée au fur et à mesure par le programme lui-même.
Il peut s’agir d’une IA complexe (prendre des décisions stratégiques, retrouver son chemin, localisation et cartographie SLAM, ..) ou simple (reconnaissance de couleurs, de formes, traitement d’image, seuils de capteurs, filtres...).
Articles
-
 Pilotage du Pobot Easy
Pilotage du Pobot Easy
2 mars 2009, par Julien H. -
 Les trois lois de la robotique
Les trois lois de la robotique
3 avril 2011, par Julien H.Les amateurs de littérature d’anticipation scientifique auront reconnu l’énoncé fondateur d’Isaac Asimov. C’est sur cette base qu’il a construit l’intrigue de ses nouvelles mettant en scène des robots "positroniques", c’est-à-dire dont l’intelligence artificielle a été programmée pour respecter ces trois règles (câblée à base de positrons, par analogie avec le câblage électronique de nos circuits).
L’énoncé des trois lois est rappelé dans notre article de 2005 sur la robotique et la (…) -
 Algorithmes génétiques
Algorithmes génétiques
25 juillet 2011, par Eric P., Julien H.Le terme génétique en informatique désigne un outil du monde de l’intelligence artificielle, permettant de converger vers un optimum (jeu de coefficients la plupart du temps) de configuration d’un système (matériel ou logiciel). Par rapport à une approche "brutale" consistant à évaluer toutes les combinaisons possibles, cette approche permet de traiter des problèmes dont la combinatoire est telle (dite "explosive") qu’une exploration systématique prendrait des temps infinis même avec des (…)
-
 L’accostage, c’est Flou ! (Docking, its Fuzzy !)
L’accostage, c’est Flou ! (Docking, its Fuzzy !)
29 février 2008, par Frédéric BernatTechniques d’accostage (docking)
Fuzzy control of automatic Docking -
 Un robot peut-il être intelligent ?
Un robot peut-il être intelligent ?
5 août 2012, par Joël C., Julien H.Avant de savoir si une machine est intelligente, il faut définir ce qu’est l’intelligence. En effet, les définitions et les formes possibles de l’intelligence (voire des intelligences) sont multiples et dépendent de l’environnement, du contexte, du domaine observé, voire même, du point de vue de l’observateur.
Le terme d’intelligence artificielle reste ambigu. Il a donné beaucoup de promesses, et provoqué autant de déceptions. L’homme comme référence ?
Aux origines des travaux en (…) -
 Gaston, hommage à Johnny Five (2012)
Gaston, hommage à Johnny Five (2012)
8 mai 2012, par Julien H.Marco a conçu et construit un robot appelé Gaston, reprenant quelques-uns des principes du robot de cinéma "Numéro 5" (Short Circuit) également connu sous le nom de "Johnny Five".
Étudiant à l’AFPA de Nice, il a fréquenté nos ateliers et assemblé plusieurs prototypes avant de trouver les bonnes pistes pour la mécanique de grande taille capable de déplacer le robot et de supporter son poids. La construction
Plusieurs versions ont été construites. D’abord la tête, avec des canettes de (…) -
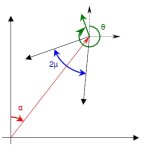
 Asservissement PID
Asservissement PID
20 décembre 2008, par Julien H.L’asservissement consiste à atteindre et maintenir une valeur cible en agissant directement sur le système en fonction de l’écart entre la consigne et la mesure.
Le PID est un type d’asservissement courant en robotique, car il permet de garantir une valeur fixe (le cap) même quand le robot est en déplacement. Comme le PID fonctionne même avec une consigne variable, on peut ainsi avoir en même temps un mouvement reproductible (suivre une trajectoire précise) et une correction des petits (…) -
Faire parler un robot
17 juin 2012, par Julien H.La synthèse vocale a fait de bons progrès, tant en accessibilité aux développeurs qu’en qualité sonore.
Les films de science-fiction s’équilibrent entre robots qui parlent et robots qui ne parlent pas. Mais lorsqu’un robot parle, cette fonction devient tout de suite une compétence très remarquable et très identifiable. L’exemple le plus "parlant" est HAL 9000, l’intelligence artificielle des oeuvres de Arthur C. Clarke et porté à l’écran par Stanley Kubrick dans "2001, l’odyssée de (…) -
 Robot Flou
Robot Flou
23 septembre 2006, par Frédéric BernatFuzzy control for mobile robot
-
 Soyons flous (be fuzzy)
Soyons flous (be fuzzy)
4 octobre 2006, par Frédéric BernatTOOLS for Robotic Fuzzy Control
