 PoBot
PoBot
 Mon premier robot ! (2010)
Mon premier robot ! (2010)
Mon objectif : apprendre les bases de la robotique, en construisant de A à Z un petit robot "classique" à partir de pièces de récupération.
Après avoir bien observé les réalisations des membres du club, j’ai décidé de construire mon premier robot. Un engin mobile et évolutif qui devrait rapidement me permettre de tester et expérimenter différentes sortes de capteurs.
La récupération des pièces
J’ai récolté auprès de mon entourage des appareils en panne ou périmés. La collecte a dépassé mes espérances ! J’ai rapidement été submergé par une pile de scanners, d’imprimantes, de lecteurs CD et DVD, de magnétoscopes, de lecteurs de cassettes, de vieux disques durs… Et la majorité en état de fonctionnement !! … On prend vraiment conscience des aberrations de notre société de surconsommation qui nous "pousse" à remplacer en permanence des appareils qui marchent parfaitement !!!
J’ai conservé tout ce qui me paraissait intéressant en imaginant leurs utilisations dans un système mobile, puis j’ai tout rangé dans des boîtes à chaussures (remplacées petit à petit par des boîtes transparentes plus pratiques).
Voici un aperçu du butin après seulement 2 semaines de récupération : des moteurs (courant continu et pas à pas), des axes, des engrenages, des poulies, des courroies, de la visserie, des batteries, des câbles électriques, des composants électroniques... Beaucoup de ces éléments sont introuvables dans les magasins de bricolage traditionnels !
Largement de quoi commencer quelque chose qui "tienne la route" !
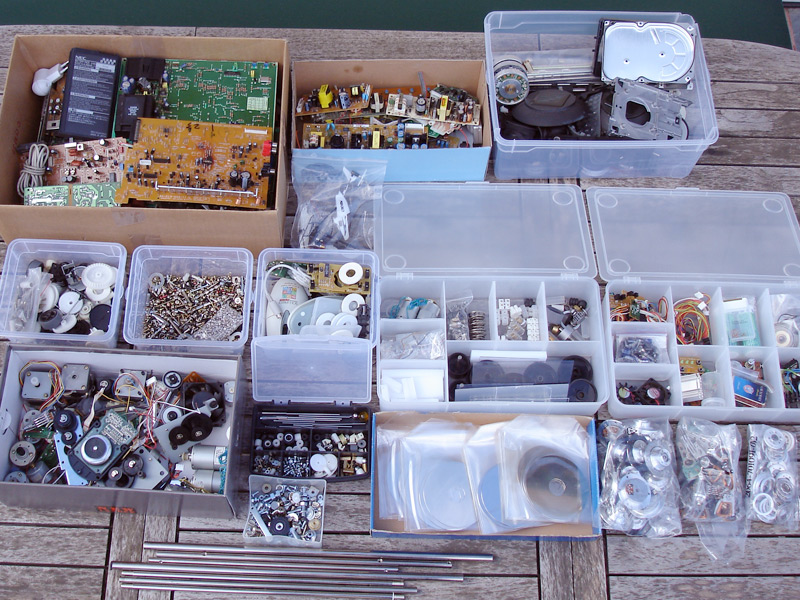
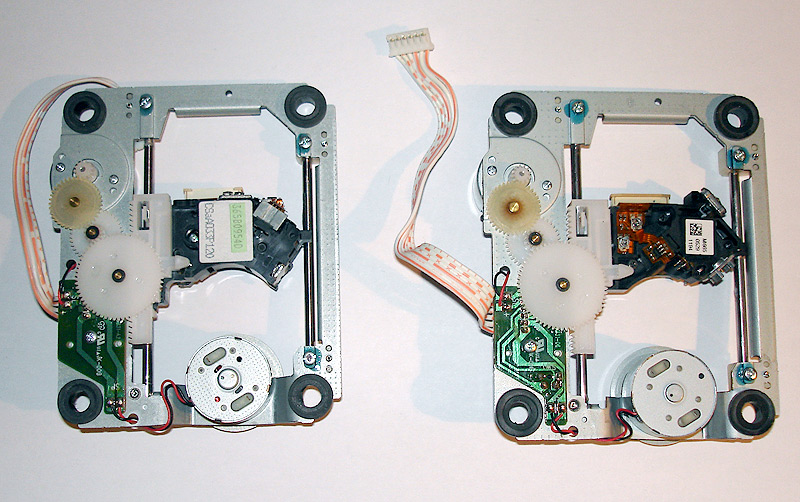
Les lecteurs de DVD vidéo sont particulièrement intéressants car on y trouve de nombreux éléments très utiles pour construire une petite "base roulante" : des moteurs, des axes, des engrenages, ainsi que des rondelles en caoutchouc et des petites vis.
La conception
Tout en démontant les appareils, j’ai commencé à imaginer la forme du robot par rapport aux pièces à ma disposition et aux contraintes que je m’étais fixées :
– Deux roues indépendantes pour qu’il puisse tourner sur lui-même.
– Une forme circulaire, car en se déplaçant et en pivotant sur place, le robot aura moins de risques de s’accrocher, ou de rester coincé dans un angle.
– Un corps transparent pour que les organes internes restent visibles.
– Des comportements basiques comme éviter des obstacles ou suivre une ligne.
– Et comme je n’ai pas d’atelier, je dois limiter les usinages le plus possible.
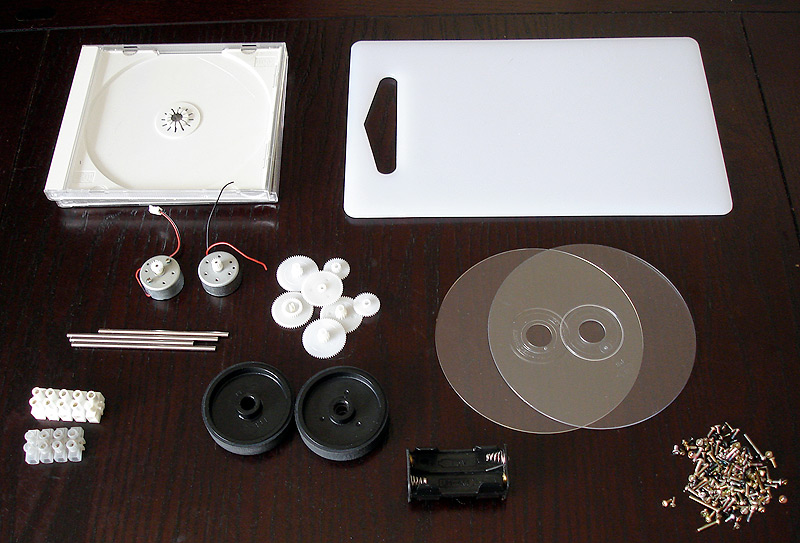
Progressivement, j’ai sélectionné les éléments qui me paraissaient intéressants : des disques transparents trouvés dans des boîtes de DVD vierges, les galets d’entraînement d’une imprimante à jet d’encre (garnies d’un "pneu" en caoutchouc très tendre), des boîtes de CD audio, les moteurs CC trouvés dans les lecteurs de DVD, des axes de 3 mm de diamètre, des engrenages de toutes tailles, ainsi que de la quincaillerie...
Dès l’instant où je connaissais le diamètre des roues et les caractéristiques des moteurs (trouvées sur Internet), je pouvais calculer le rapport de réduction.
J’ai alors sélectionné les engrenages de manière à ce que le robot se déplace, en théorie, à une vitesse relativement rapide de 80 cm/s.
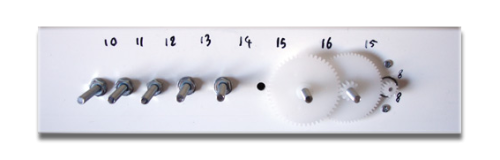
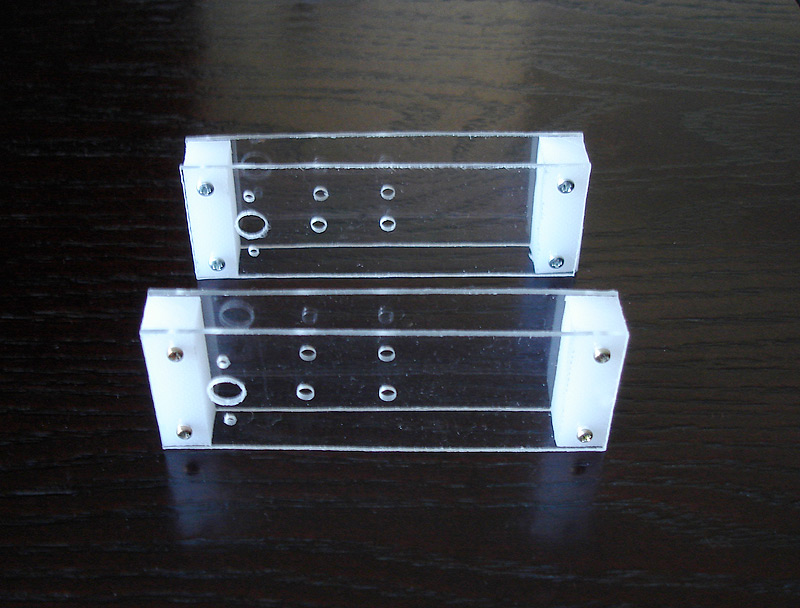
Afin de tester facilement différentes combinaisons de pignons et de déterminer le meilleur rapport encombrement / réduction, j’ai bricolé un petit banc d’essais avec une cornière en PVC et quelques boulons de 2,5 mm de diamètre.
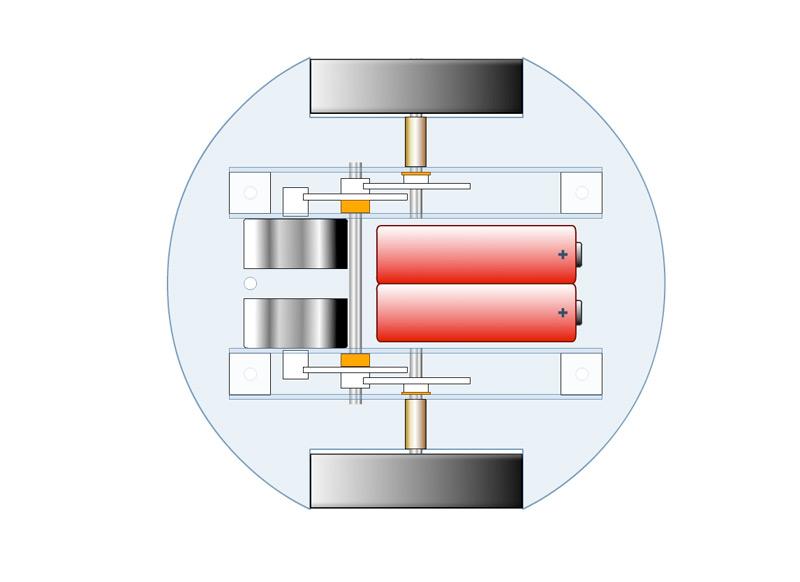
C’est le choix d’utiliser les disques transparents qui a déterminé la taille de l’engin : 12 cm de diamètre.
Sa hauteur (sans les roues) a été déterminée par l’encombrement des moteurs, du réducteur, de l’alimentation et de l’électronique.
Pour l’alimentation, j’ai choisi un coupleur de 4 batteries LR3 (AAA) pour ses bons rapports entre l’encombrement, le poids et l’autonomie.
Dès que j’ai eu une idée assez précise de la partie mécanique, j’ai dessiné les plans du robot à l’échelle.
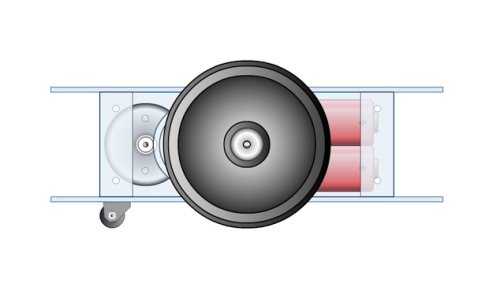
Parallèlement, j’ai commencé à travailler sur les fonctions, les capteurs et le contrôle électronique du robot (que je désirais modulables et évolutifs).
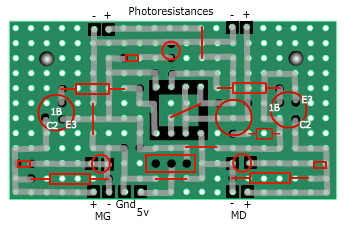
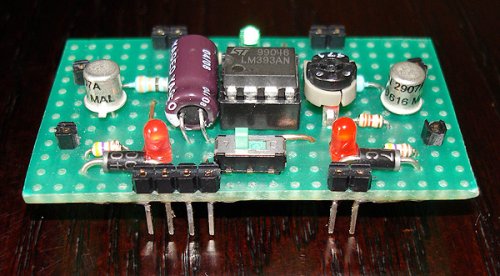
Le premier module envisagé donnera au robot la possibilité de rechercher une source de lumière, il est tiré du livre de Frédéric Giamarchi "Je construis mon premier robot mobile". C’est une "logique câblée" composée de 2 photorésistances, d’un comparateur et d’une simple "marche avant". Aussi, en orientant les photorécepteurs vers le sol, je devrais peut-être pouvoir le convertir en "suiveur de ligne"... Et participer aux courses de MaVin ! :)
Progressivement je compte ajouter des détecteurs IR, un capteur de collision, un driver plus efficace (un "pont en H" pour piloter les moteurs en avant comme en arrière), ainsi qu’un micro-contrôleur pour une programmation informatisée.
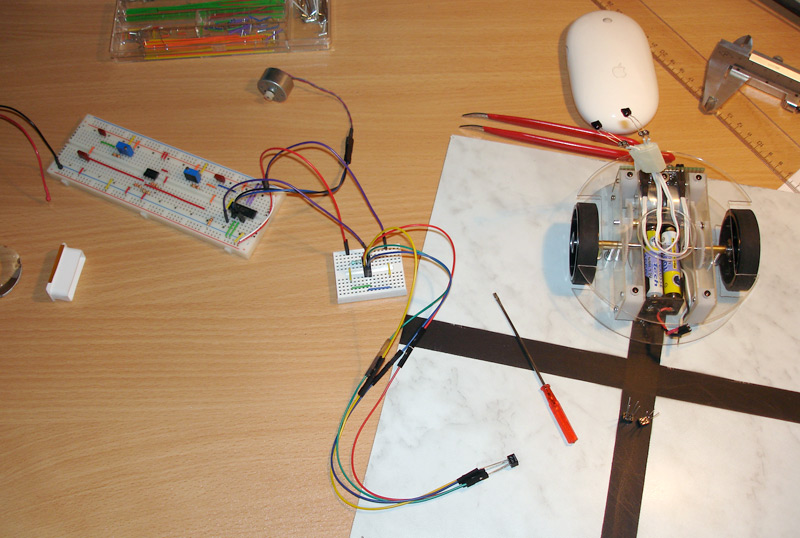
J’ai vérifié le bon fonctionnement de mon premier montage électronique :) sur une plaque d’essais. En même temps, j’ai testé un modèle de capteur Infrarouge prévu pour la première évolution.
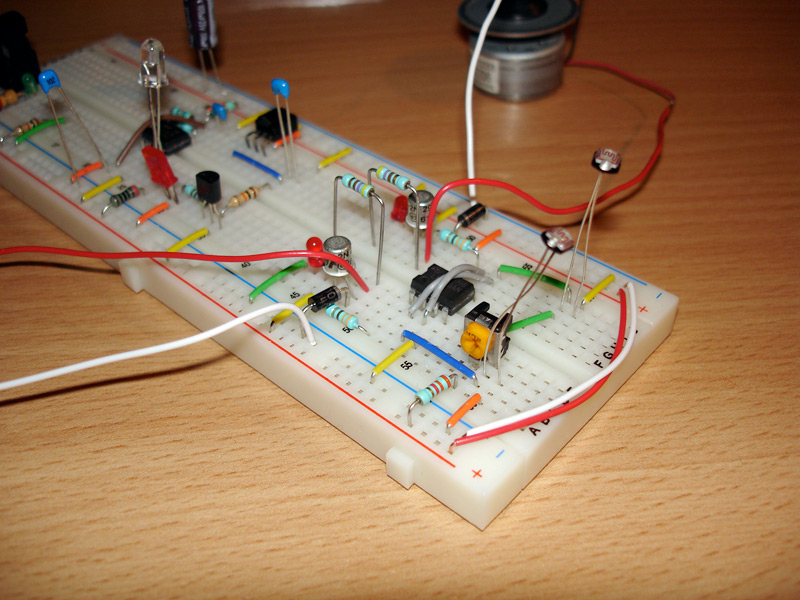
Le capteur IR est à gauche, le module de recherche de lumière à droite.
La mécanique
N’ayant aucun outil adapté à la micro-mécanique, je me suis équipé en prenant soin de sélectionner du matériel fiable et robuste qui me servira de nombreuses années, comme par exemple une mini perceuse et une colonne de perçage de marque Proxxon (je remercie les membres de Pobot pour leurs excellents conseils) et des forets de 2,9 à 3,1 mm.
J’ai découpé à la scie à métaux les éléments en plastique après les avoir protégés avec du ruban adhésif de peintre (en plus d’éviter les rayures éventuelles, ça facilite le traçage au crayon à papier).
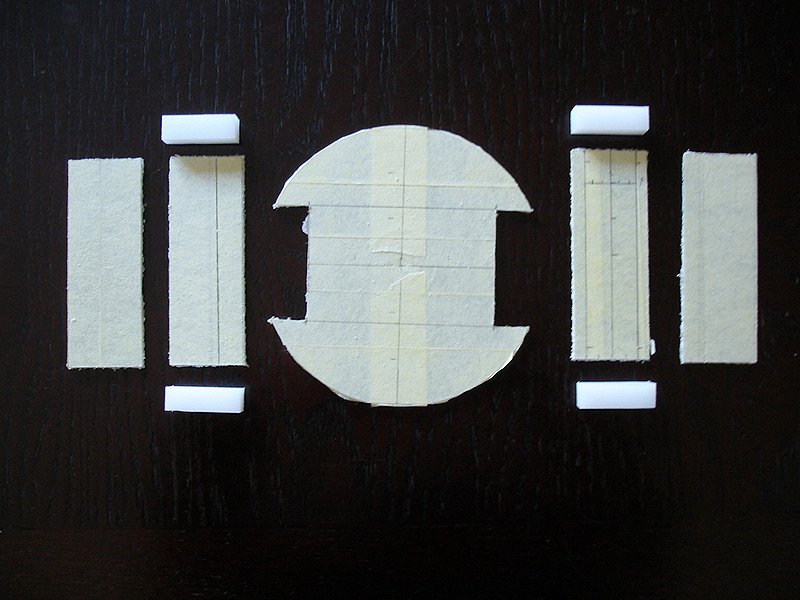
Les joues des réducteurs ont été percées (en même temps pour avoir un bon alignement), puis assemblées avec les supports (confectionnés dans une planche à découper en nylon).
Les axes ont été tronçonnés à la mini-perceuse (équipée d’un disque au diamant). Le perçage des pignons a été ajusté (2.9 mm de diamètre pour les fixes, 3.1 mm de diamètre pour les mobiles). Les moteurs ont été vissés à leur place. Les roues ont été fixées sur leur axe...
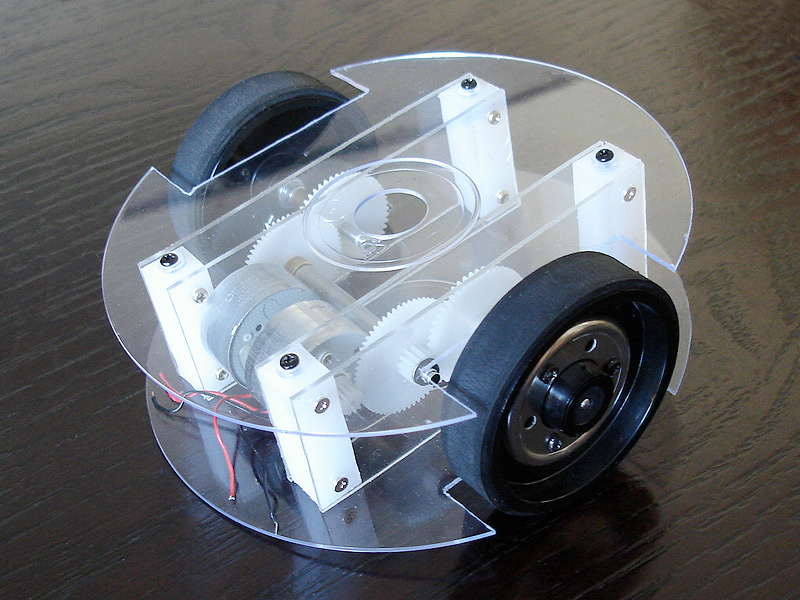
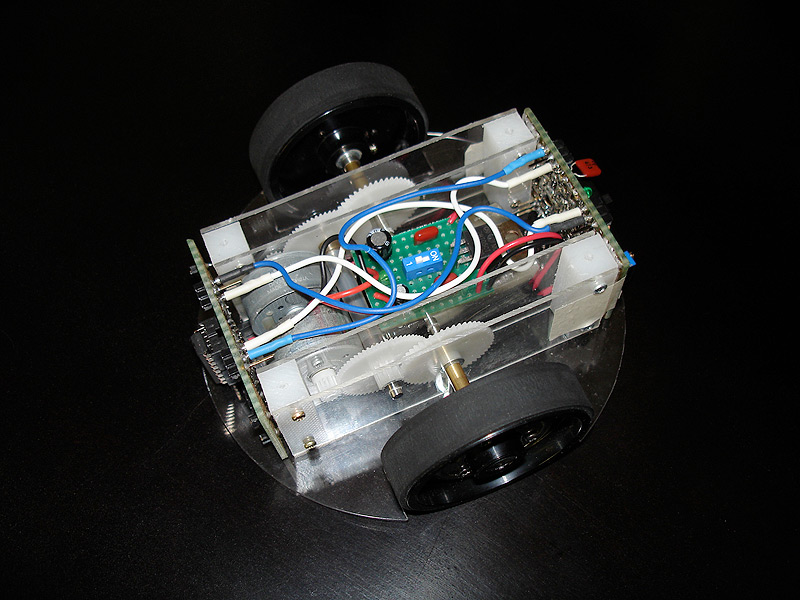
Sur l’image suivante, pratiquement tous les éléments mécaniques sont en place. Les enjoliveurs proviennent de disques durs informatiques.
C’est le moment de vérifier si tout est bien ajusté ! Je fais pivoter les roues...
Ouf ! Rien ne coince, la mécanique tourne sans forcer ! :)
Ça commence à ressembler à quelque chose ! :)
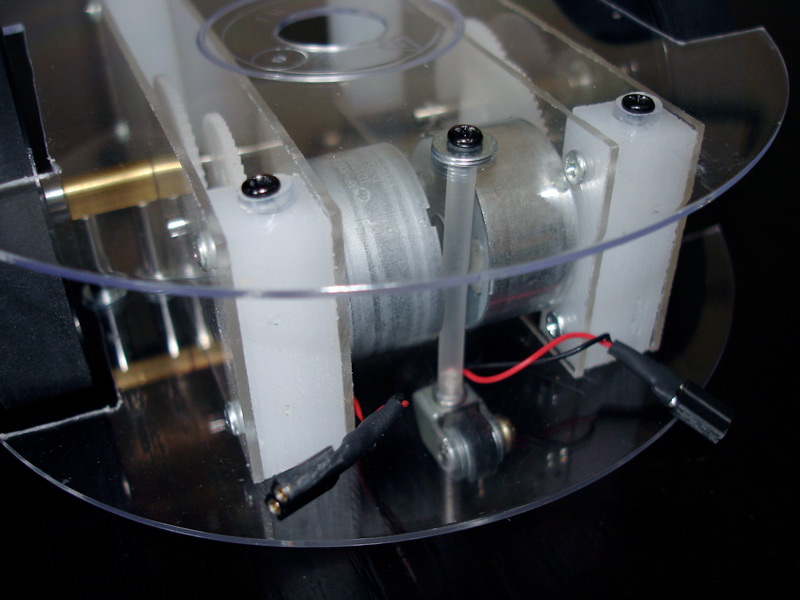
La roue folle est constituée d’un galet de magnétoscope monté sur le réservoir d’encre d’un stylo à bille (l’alcool à brûler est efficace pour éliminer les restes d’encre).
Les paliers en laiton sont des dominos desquels j’ai retiré l’isolant.
L’électronique
Maintenant que la mécanique est en place, je peux passer à l’électronique et à la réalisation du premier module sur une plaque de prototypage à pastilles, après avoir organisé les pistes dans un logiciel de dessin vectoriel.
C’est le moment des premiers tours de roues !!
Je branche le module sur le robot (sans les capteurs) et j’ajoute un coupleur de batteries...
Attention ... Je fais glisser l’interrupteur ... Et l’engin file à toute vitesse, droit devant lui !!
Ça roule !! :) :)
En l’absence de capteurs, le robot se dirige relativement droit et à vue de nez, à la vitesse que je souhaitais !
Ça se présente plutôt bien ! :)
Il est temps de lui donner un nom ! ... En pensant aux futures courses de MaVin, je le baptise "Hermann" ! :)
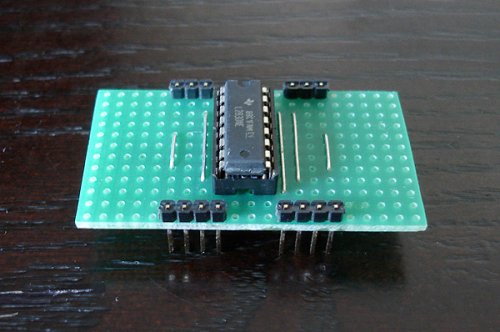
En parallèle, je prépare l’évolution du robot "version BEAM" vers une "version informatique" comportant une carte Arduino, des capteurs infrarouges, des capteurs de contacts et un "pont en H" pour piloter les moteurs.
En attendant le branchement des capteurs photosensibles, je vous montre la boîte de rangement du robot...

J’ai donc placé sur le robot deux petites antennes comportant des photo-résistances, puis j’ai testé son comportement :
– en mode "photovore" (antennes croisées), le robot se dirige vers la baie vitrée ensoleillée
– en mode "photophobe"(antennes parallèles), il se cache dans l’ombre de la pièce.
Il fonctionne très bien !! :)
Afin de tester le suivi de ligne, j’ai orienté les photo-détecteurs vers le sol et placé l’engin sur une piste...
Ça fonctionne, un peu, à condition de faire très attention à l’éclairage ! Mais je me rends vite compte que les photo-résistances ne sont pas bien adaptées à cette utilisation.
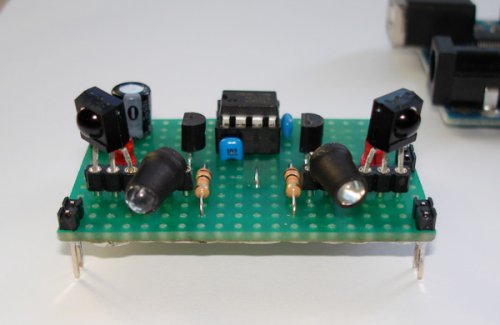
Il est temps de passer à la création d’un nouveau module électronique : un circuit comportant deux capteurs infrarouges et un générateur de PWM (Pulse Width Modulation) !
Associé au driver (pont en H) déjà réalisé, je devrais obtenir un engin capable de suivre une piste noire.
Grâce à deux potentiomètres je pourrai faire varier la largeur des impulsions et donc, régler facilement la vitesse des moteurs.
Les capteurs utilisés sont des phototransistors infrarouges QRT1114 (http://www.sparkfun.com/datasheets/BOT/QRD1114.pdf).
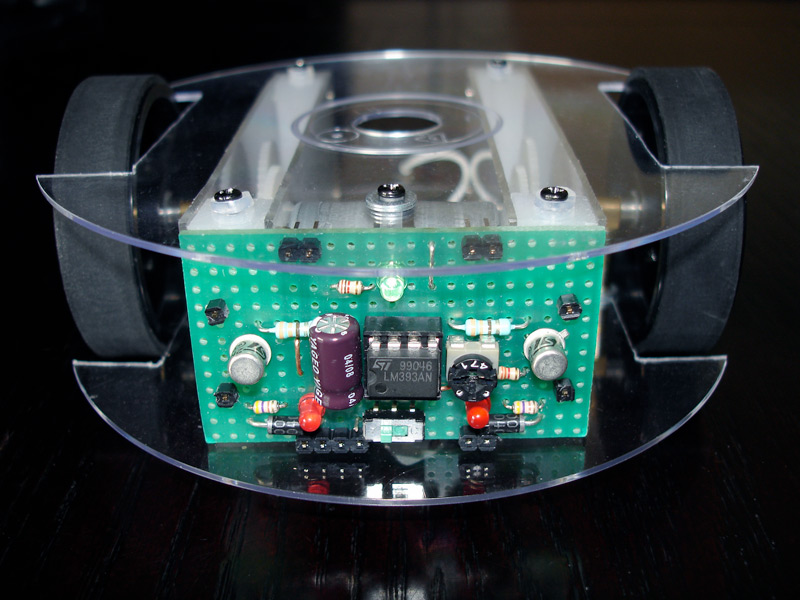
Voici le prototype en fonction :
Le module PWM/IR et le Pont en H sont en place, le robot est maintenant capable de suivre une ligne convenablement :
Nouvelle évolution : j’ai ajouté une petite alimentation 9V / 5V afin de remplacer le coupleur de 4 batteries AAA par une pile de 9V. Ainsi, les moteurs peuvent recevoir plus de courant.
L’alimentation est basée sur un régulateur de tension 7805.
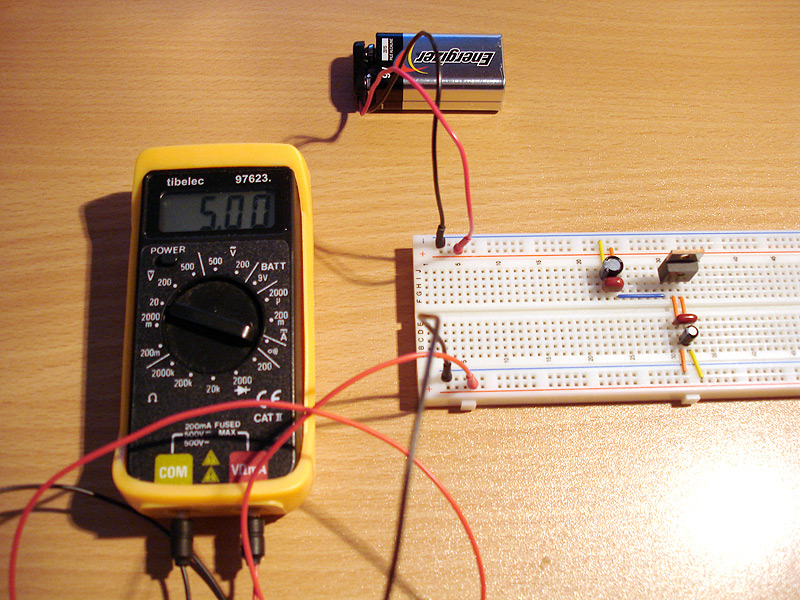
L’opération est un succès : d’après une mesure pifométrique, le robot est deux fois plus rapide qu’avant.





Vos commentaires
# Le 19 mai 2015 à 13:53, par Emerick En réponse à : Mon premier robot ! (2010)
En réponse à : Mon premier robot ! (2010)
J ai réussi le corps du robot il va tres vite mais je voudrais qu il suivre les lignes noir commentnje fais les, , schema d, , internet sont complexe pour moi
Répondre à ce message
# Le 22 février 2015 à 00:25, par Emerick En réponse à : Mon premier robot ! (2010)
En réponse à : Mon premier robot ! (2010)
Ces domage vous montrer pas les shema de l électronique
Le capteur infrarouge j aurait aimé avoir le shema car je me suis lance dans ce projet
# Le 2 mars 2015 à 12:40, par Eric P. En réponse à : Mon premier robot ! (2010)
En réponse à : Mon premier robot ! (2010)
Je laisse l’auteur de l’article fournir ces éléments s’il les a.
Par respect pour les lecteurs, essayez de soigner un peu l’orthographe de vos message. Ca pique trop les yeux :)
# Le 13 mars 2015 à 16:57, par EMERICK En réponse à : Mon premier robot ! (2010)
En réponse à : Mon premier robot ! (2010)
je pense que vous avez acheté tout l électronique se serai trop difficile de trouver les circuit intégré et les plaque a pastille
Répondre à ce message
# Le 12 mai 2013 à 15:19, par Nat En réponse à : Recup
En réponse à : Recup
Bonjour ou a tu recupérer tous l’electirique ?
# Le 13 mai 2013 à 23:22, par Julien H. En réponse à : Recup
En réponse à : Recup
Dans le premier paragraphe, Joël explique qu’il a tout trouvé dans des appareils électriques ou électroniques. A moins que j’aie mal compris la question ?
Répondre à ce message
# Le 28 juin 2011 à 14:42, par Guillaume En réponse à : Quelques petites questions !
En réponse à : Quelques petites questions !
J’aime beaucoup cette base ! J’ai rassemblé presque toutes les parties pour en construire deux, j’aimerai en faire des bases roulantes pour Arduino. Cependant il y a une ou deux choses que je ne comprends pas sur le montage (mécanique).
Les paliers en laiton (dominos "nus"), m’ont l’air constamment orientés vers le bas et fixés au disque transparent inférieur, mais dans ce cas, la roue devrait être bloqué non ?... Je ne comprends pas comment est réalisé l’accouplement roue - moto-réducteur.
Sur mon premier robot, j’ai aussi utilisé des dominos, d’un côté l’axe de l’ensemble moto-reducteur, de l’autre l’axe de la roue, le tout bien serré. Et dans ce cas, le domino tourne en même temps que tout le reste ! Mais ce n’est pas ce que je vois sur la vidéo... Est-ce tout de même la même chose ici ?
Autre point sombre, pourquoi l’utilisation d’un tube d’encre de stylo bille pour la roue folle ? Je ne comrpends pas du tout le montage...
Voilà tout ! Je vous tiens au jus, dès que les miens sont finis ! (J’espère assez vite ^^ !)
Guillaume
# Le 31 octobre 2012 à 01:12, par ? En réponse à : Quelques petites questions !
En réponse à : Quelques petites questions !
bonsoir,
je pense que le tube d’encre est parce-qu’il n’y as pas assez de matière pour faire un filet sur le disque vu qu’il est très fin ;)
# Le 2 novembre 2012 à 06:03, par V.I.N.C.E.N.T En réponse à : Quelques réponse ! ;)
En réponse à : Quelques réponse ! ;)
La roue folle est vissée sur le tube d’encre. Le tube est mobile et permet la rotation de l’ensemble.
Répondre à ce message