 PoBot
PoBot
 Robot tondeuse (2009)
Robot tondeuse (2009)Parmi les robots "utiles" mais sympathiques à étudier, il y a l’aspirateur (déjà fait, sans trop de conviction) et le robot tondeuse.
Frédéric a réalisé un robot qu’il nous présente ici :
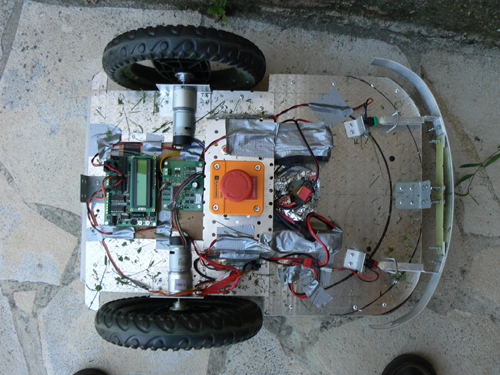
Premier prototype - mai 2009

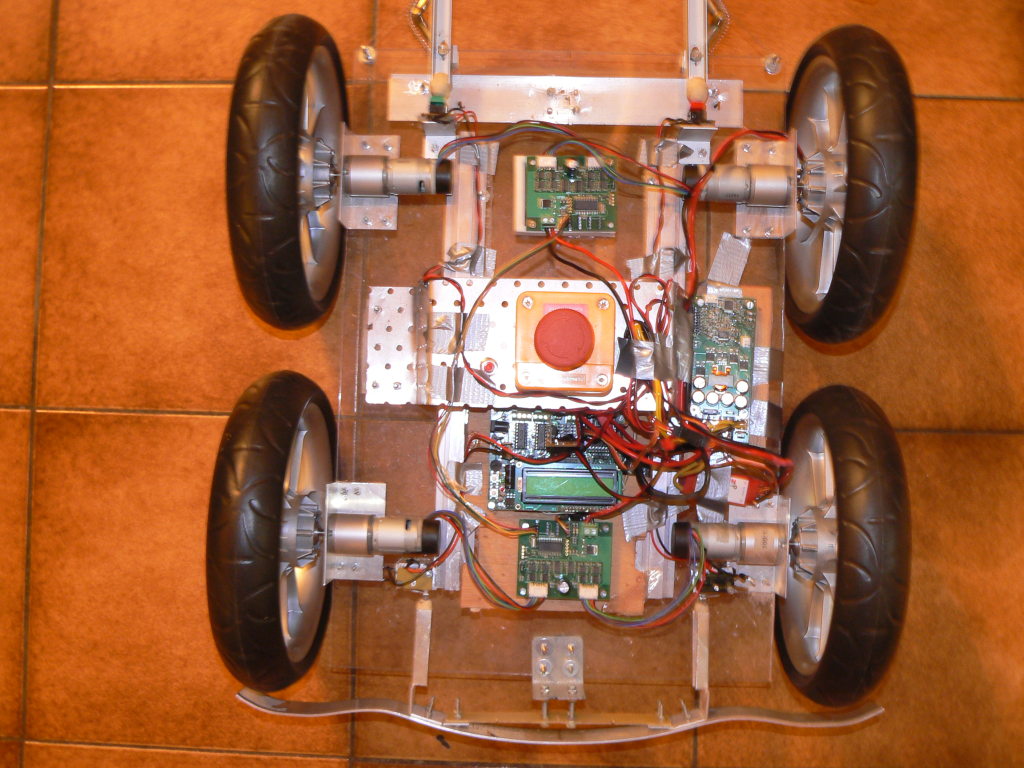
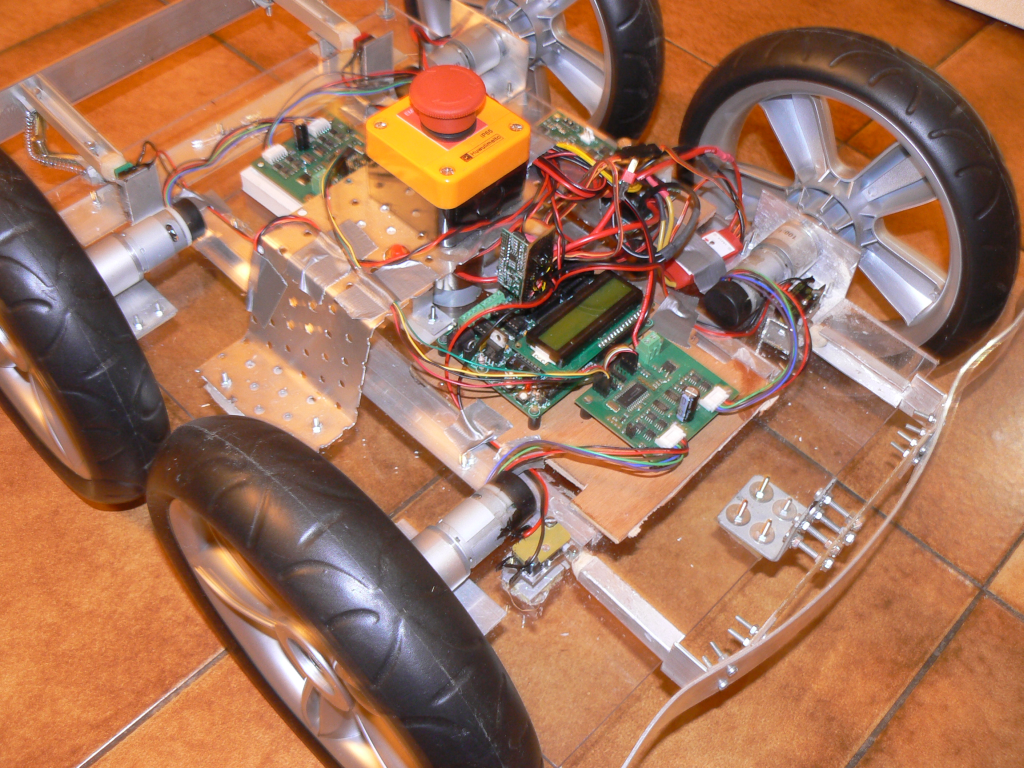
Evolution - juillet 2009

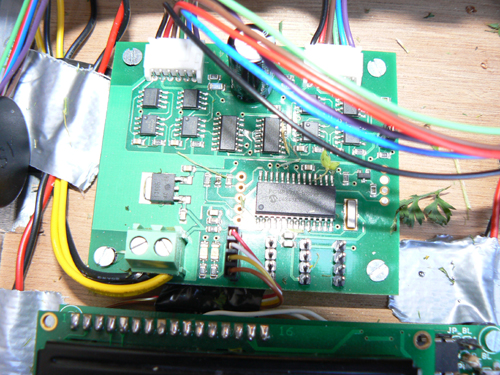
Description
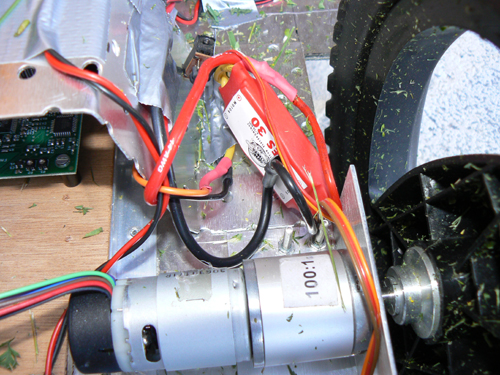
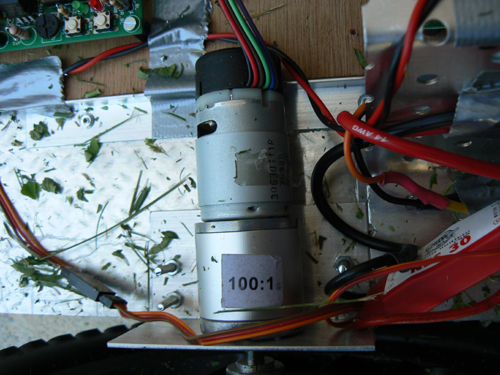
– moteurs à courant continu (DC) avec réducteurs 100:1
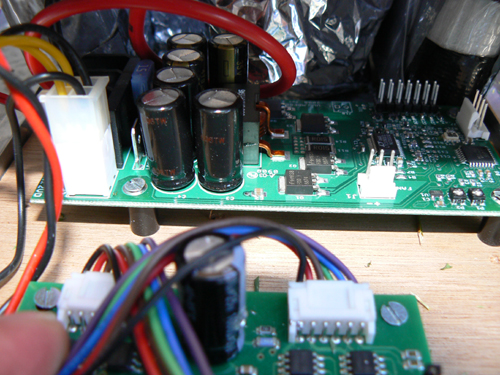
– drivers moteurs Devantech MD23
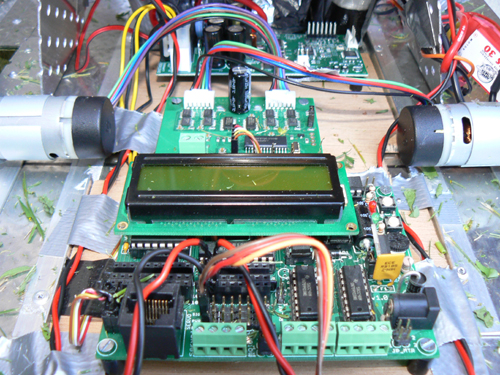
– carte de contrôle Polybot Board à microcontrôleur Atmel AVR ATmega644 (version 1.1)
– liaison I2C entre les capteurs et la carte principale modifiée
Tout ça, c’est pour un robot standard. Maintenant pour la partie tondeuse :
– le moteur de coupe est un Speed 600 monté avec un réducteur 5 :
– on utilise un variateur de modélisme pour le contrôle du moteur de coupe
– les roues de landau ont été achetées chez Bébécar
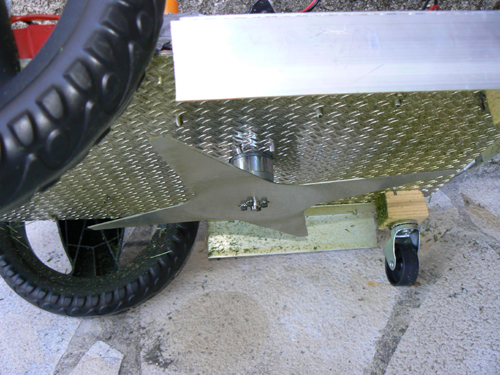

– la lame de coupe provient d’un robot tondeuse LawnBott achetée sur Internet.
La carte d’alimentation est une carte pour les "Car PC" donc de 10 à 15 V en entrée et boosté en sortie stabilisée pour avoir du 12V continu.
L’énergie est apportée par deux packs de batteries LifePo4 (A123), un pour la logique et les moteurs de propulsion et un autre pour le moteur de coupe. Quatre éléments sont montés pour atteindre 12,8 volts et délivrer 3400 mAh.
La sécurité : deux bumpers (interrupteurs) devant vont détecter la présence d’un obstacle et interromptre la coupe et le déplacement du robot

Les roulettes de devant vont être changées car trop petites.





Vos commentaires
# Le 23 septembre 2018 à 15:58, par jerome En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Bonjour, merci beaucoup pour vos informations, je suis aussi en train de réaliser un robot tondeur, j’aimerai savoir le diamètre des roues motrices dans la version 2RM et aussi dans la version 4RM. Vous serait-il possible aussi de nous indiquer la référence des moteurs de propulsion que vous avez retenue, merci d’avance, jerome
# Le 6 octobre 2018 à 17:32, par Frédéric Bernat En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Bonjour,
Le diamètre des roues est de 24.5cm dans les deux cas.(roue de landau)
La référence des moteurs est : EMG49 - GearMotor with encoder.de chez robot electronics
Mais je vous conseille de choisir plutôt ces moteurs:Moteur Brushless 159RPM Avec Encodeur 12V sur le site france robotique.
Bonne continuation
Frédéric BERNAT
Répondre à ce message
# Le 6 août 2017 à 11:52, par Jéremy En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Franchement bravo j’aimerai pouvoir en faire autant mais au niveau Arduino je suis pas du tout au niveau ! Quand je regarde le prix des robots tondeuses j’aimerai plutôt construire la mienne mais mes conaissances avec Raspberry ne sont pas suffisantes ... Quelqu’un connais un bon tuto sur Internet pour avoir les bases sur des tondeuses automatiques ?
# Le 28 septembre 2017 à 23:39, par Eric P. En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Bonsoir,
Je doute qu’un tel tuto existe. On peut trouver des sites où les auteurs expliquent comment ils ont fait, mais ce sera à vous d’en extraire les informations intéressantes et de le mettre en pratique à votre niveau.
Si vous tenez vraiment à vous lancer dans un tel projet sans avoir de connaissances suffisantes en Arduino ou Raspberry, la seule option raisonnable est de vous mettre en contact avec un club local et de leur proposer de le réaliser avec eux. Outre l’aide que cela vous apportera, vous apprendrez également énormément au contact de personnes plus expérimentées.
Par ailleurs, l’option Raspberry ne me parait ni indispensable ni judicieuse, car qui dit Raspberry dit système d’exploitation, avec toutes les contraintes associées de procédure d’arrêt propre par exemple. Un bon micro-contrôleur 32 bits est largement assez puissant pour gérer les déplacements d’une tondeuse.
Cordialement
Eric
Répondre à ce message
# Le 4 février 2016 à 00:26, par #mov En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Bonjour super projet !
j’aimerai moi aussi me lancer dans un projet similaire au tiens, pourrais tu me donner plus d information sur les roues les moteurs des roues et comment tu as fait la liaison roue moteur merci
# Le 31 mars 2016 à 11:36, par Eric P. En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Impossible de répondre à une question aussi vague. Soyez plus précis.
Répondre à ce message
# Le 7 octobre 2013 à 22:51, par hubert En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
bonjour,
vous en êtes ou dans votre robot tondeuse ?
merci
# Le 8 octobre 2013 à 18:29, par Frédéric Bernat En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Bonjour,
J’en suis au quatrième prototype. Nouveau chassis, nouveaux moteurs brushless sensored outrunner, nouveau capteur (lidar), amélioration du capteur d’herbe (optique). Modification des algorithmes de tonte (fini l’aléatoire).
Mais j’avance lentement, avec quelques heures de bricolage le week end ....
Le but est de faire une tondeuse robot plus légère et moins gourmande en énergie.
# Le 5 mars 2014 à 11:34, par Stéphane Carré En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Bonjour,
Ce projet est super intéressant et ce serait super de voir des photos du dernier prototype.
Pourquoi être passé à un proto sur 4 roues ?
merci
Stéphane
# Le 7 mars 2014 à 11:08, par Frédéric Bernat En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Bonjour,
Quatre roue motrices sont plus performantes sur terrain irrégulier, La plupart des tondeuses commerciale fonctionnent correctement si vous avez un terrain qui ressemble a un Golf... c’est pas mon cas.
Répondre à ce message
# Le 5 avril 2011 à 14:36, par Marc En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Toutes ces batteries pour une autonomie de combien de temps ? tondeuse robot
# Le 12 mai 2011 à 19:12, par Julien H. En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Si les moteurs consomment 2 ampères en continu (estimation haute), alors une batterie de 3400 Ah va durer 100 minutes environ, largement suffisant pour une tondeuse.
Quelle est l’autonomie des robots tondeuse que tu connais ?
Répondre à ce message
# Le 27 juillet 2009 à 10:58, par claudy En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
pour quelles surface as-tu utilisé ce robot ?
combien de temps tient-il avec les accus ?
# Le 27 juillet 2009 à 22:55, par Frederic En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
Mon terrain fait a peu près 1400 m², légèrement en pente et irrégulier, le robot fonctionne environ une heure ,mais en fait je ne l’ai jamais laisser jusqu’à épuisement des batteries. Le robot a été modifier depuis la parution de l ’article il est maintenant 4 roues motrices et le châssis est en plexiglas de 5mm. De nouvelles photos vont bientôt paraitre.
# Le 4 avril 2011 à 16:50, par Marc En réponse à : Robot tondeuse (2009)
En réponse à : Robot tondeuse (2009)
L’idéal serait de mettre une vidéo le montrant à l’œuvre. Comme ça on peut avoir idées de sa capacité, de son esthétique… tondeuse robot
Répondre à ce message