 PoBot
PoBot
Où il est question de programmer notre EV3 en C directement
Accueil > Mots-clés > Langages > C++
C++
Le C++ est un langage orienté objet qui se distingue ainsi du C en ajoutant la possibilité d’organiser et de réutiliser le code (héritage, polymorphisme, encapsulation).
Articles
-
 Java, Python... et le C ?
Java, Python... et le C ?
11 novembre 2013, par Eric P. -
 Moteur pas-à-pas piloté par GPIO du Raspberry Pi
Moteur pas-à-pas piloté par GPIO du Raspberry Pi
24 février 2013, par Frédéric R.Je sais à présent piloter un moteur pas à pas depuis mon Raspberry pi directement (en utilisant les ports GPIO).
Pour ceux qui seraient intéressés, voici comment j’ai procédé Théorie sur les moteurs pas à pas Piloter un moteur pas à pas (via un CI L293D) avec une Arduino Programme Arduino Théorie du GPIO de la Raspberry Pi Assemblage de LEDs pilotées par la Raspberry Allumer 4 LEDs avec un script en Python Utilisation de la bibliothèque WiringPi en C Programmation du pilote en C (…) -
 Le dSPIN de ST-Micro : un driver évolué pour moteur pas à pas
Le dSPIN de ST-Micro : un driver évolué pour moteur pas à pas
11 juillet 2012, par Eric P.Où il est question du L6470 de ST-Micro, également connu sous l’appellation "dSPIN"
-
La localisation des sources de son : portage en C++ / ALSA
11 décembre 2012, par Frédéric P.L’article précédent présentait les bases de la localisation des sources de son. Le prototype était développé en Java et était un peu lourd en CPU et mémoire.
Afin d’avoir une solution adaptée aux robots "légers", voyons comment porter ce module en C++ (en utilisant l’API ALSA pour l’accès au son). Une étape indispensable pour porter le module sur la Raspberry Pi par exemple...
Un environnement de développement C++
Première étape pour notre portage, avoir un environnement de (…) -
 Ralentisseur de servomoteur
Ralentisseur de servomoteur
20 octobre 2013, par Jean-Pierre, Julien H.Cet article est une astuce pour contrôler la vitesse d’un servomoteur sans alourdir son programme principal. L’idée vient des modélistes qui utilisent des radio-commandes, et consiste à intercaler entre le signal et le servomoteur une petite puce qui fera l’intermédiaire.
-
 Logiciel d’un robot bipède
Logiciel d’un robot bipède
17 novembre 2013, par Julien H.Notre robot bipède est désormais équipé d’une carte Arduino qui contrôle les 4 servomoteurs en microsecondes et pas en degrés : cela permet des mouvements beaucoup plus fluides.
-
 La carte d’extension BrickPi
La carte d’extension BrickPi
16 décembre 2013, par Eric P.Lors d’un de mes récents échanges téléphoniques avec lui à l’occasion d’une commande professionnelle, Yassine de Génération Robots m’a gentiment proposé de me faire parvenir une BrickPi en vue de la tester et de vous en faire un petit compte-rendu. Dont acte.
BrickPi : Kesako ?
Pour ceux qui ne suivent pas assidument l’actualité Raspberry Pi, la BrickPi est une carte créée par Dexter Industries et ayant pour vocation d’offrir à la Raspberry Pi une interface matérielle avec les capteurs (…) -
Premiers programmes sur Arduino
30 décembre 2012, par Julien H.Nous vous présentons différents codes sources pour votre nouvelle carte Arduino.
Pour pouvoir les utiliser, il faut avoir installé l’environnement de développement Arduino ou bien utiliser un outil de compilation en ligne de commande.
Faire clignoter une led
Le but de l’exercice est d’écrire un premier programme, le transférer dans la carte et de l’exécuter. Le cahier des charges est de faire s’allumer une lumière (LED) présente directement sur la carte.
Pour réaliser cet exercice (…) -
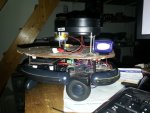 Vecteur de Perception, Logique Floue & LIDAR
Vecteur de Perception, Logique Floue & LIDAR
6 octobre 2018, par Frédéric BernatUtilisation d’un Algorithme de Logique Flou pour contrôler un robot équipé d’un LIDAR
-
 Capteur de couleur TCS230
Capteur de couleur TCS230
5 septembre 2013, par Julien H.Évaluer la couleur d’un objet abordé par un robot passe par un capteur de lumière capable de différencier chacune des composantes, généralement à partir d’un filtre.
Le capteur présenté ici est une grille de 64 récepteurs miniatures avec trois filtres rouge, vert, bleu permettant de déterminer une teinte avec suffisamment de précision.
Nous avions déjà testé des photodiodes recouvertes d’un filtre coloré afin de déterminer une couleur. Cependant le montage d’amplification du courant (…)
