 PoBot
PoBot
 Echange bidirectionnel par radio 433 MHz
Echange bidirectionnel par radio 433 MHzUn kit radio 433 MHz nous permet de piloter un robot à longue distance grâce à une liaison série bidirectionnelle simple à mettre en œuvre entre un ordinateur en USB et un montage équipé d’une communication UART.
Laurent nous a fait découvrir le kit APC220 lors d’un atelier et force est de constater qu’il vaut vraiment le coup.

Description du kit
Le kit est disponible chez Zartronic où toutes les caractéristiques techniques sont présentées.
Comparaison des solutions
Jusqu’ici, nous avions (surtout) utilisé des communications à 2,4 GHz avec les protocoles 802.15.4 ou Zigbee grâce aux modules XBee. Leur intérêt est grand et nous leur avons dédié un certain nombre d’articles.
Comme me le fait remarquer Eric, ce n’est pas la première fois que nous utilisons un système de communication dans cette bande de fréquence : les modems OneRF qui équipent le radeau Medusa utilisent le 433 MHz.
Mais quand il s’agit d’une liaison entre seulement deux systèmes à vitesse faible (9600 bps), les solutions radio sont suffisantes. Il existe depuis longtemps des émetteurs / récepteurs en 433 MHz, mais ce kit est prêt à l’emploi.
Matériel et coût d’une solution XBee :
– deux modules XBee : 25 euros chaque
– une platine de connexion avec le microcontrôleur : 20 euros
– une platine de connexion USB avec l’ordinateur : 20 euros
Matériel et coût d’une solution APC220 :
– USB + deux modules 433 : 48 euros
Conclusion
Les XBee restent bien supérieurs en fonctionnalités, et l’inconvénient financier disparait si vous devez connecter 3, 4, 5 dispositifs électroniques entre eux, avec des fonctionnalités avancées telles qu’un réseau de type mesh.
Mais les débutants qui veulent seulement une liaison série en supprimant le câble pourront utiliser la seconde solution plus économique (et ça évitera la frustration qu’on peut lire sur de nombreux forums quant à la compréhension de la configuration des XBee..)
Le kit est tout petit, mais l’antenne prend de la place, prévoyez bien votre conception.

Utilisation sur un robot
Un module APC220 est directement connectable sur une carte à base de micro-contrôleur courant (PIC, AVR) grâce à une tension 5 volts et des signaux UART.
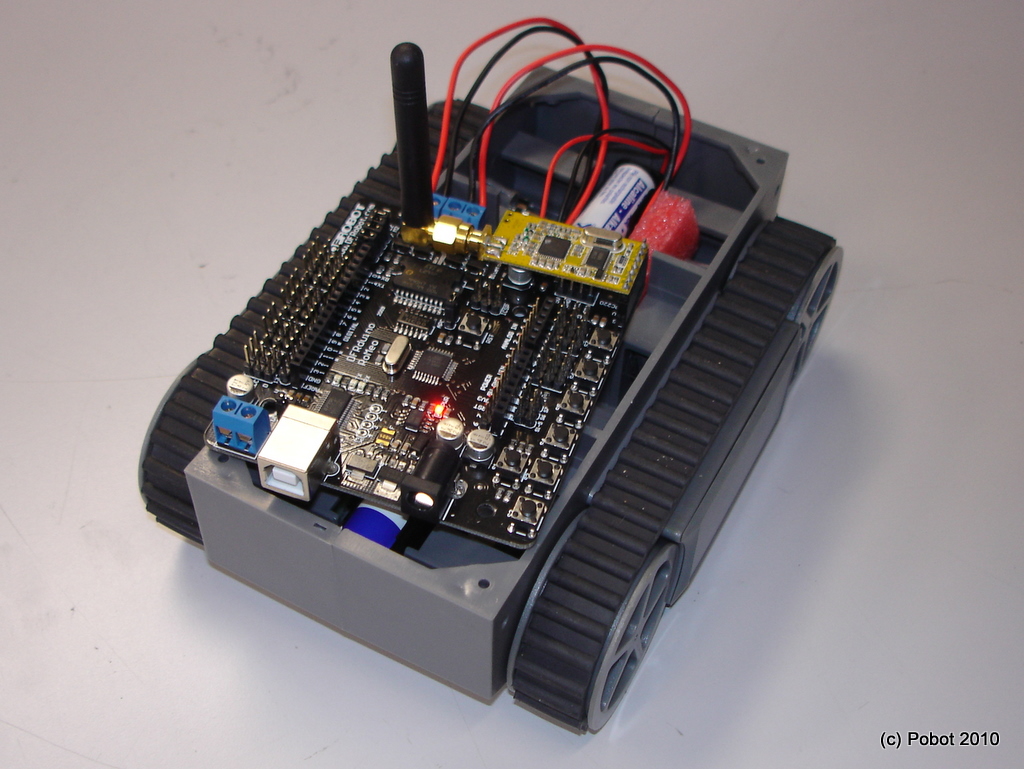
Encore mieux, la carte Romeo (famille Arduino) de DFRobot dispose d’un port supplémentaire où le kit APC220 se broche directement (recouvrant les broches additionnelles I2C donc prévoir des connecteurs plats).
Comme cette carte est utilisée en atelier pour piloter notre robot à chenilles, c’est naturellement sur ce robot que Laurent a fait ses tests :





Vos commentaires
# Le 3 novembre 2015 à 19:12, par marin dorange En réponse à : Echange bidirectionnel par radio 433 MHz
En réponse à : Echange bidirectionnel par radio 433 MHz
Bonjour merci pour ce tuto mais une question me turlupine : est ce que le module APC220 peut il faire une liaison entre plusieurs arduino ? merci de votre reponse :D
Répondre à ce message
# Le 1er janvier 2011 à 18:34, par ? En réponse à : Contrôle à distance par radio 433 MHz
En réponse à : Contrôle à distance par radio 433 MHz
Pas d’accord :)
Le radeau Medusa utilise un modem radio One-RF en 433MHz justement (cf cet article et ses frères).
# Le 21 avril 2012 à 12:53, par MicMac En réponse à : Contrôle à distance par radio 433 MHz
En réponse à : Contrôle à distance par radio 433 MHz
Bonjour,
J’utilise le module APC220 dans le cadre d’une communication en mon pc et une arduino mega 1280. J’ai un problème avec RF-Magic, je ne parviens pas à configurer correctement les modules pour pouvoir établir une communication entre eux. Pouvez-vous m’aider ?
# Le 22 avril 2012 à 21:46, par Julien H. En réponse à : Contrôle à distance par radio 433 MHz
En réponse à : Contrôle à distance par radio 433 MHz
Nous avons l’habitude d’utiliser ces modules pour une communication directe, "sortie de la boite". Pour du paramétrage, on préfèrera les XBee qui sont plus souples à configurer.
La première chose à faire est de s’assurer que le module radio est sur un port de communication supporté par le logiciel (COM1, COM2, etc... et pas COM44).
Ensuite, essayez ceci : d’abord ouvrir le logiciel, puis connecter l’APC220 au PC.
# Le 23 avril 2012 à 12:32, par MicMac En réponse à : Contrôle à distance par radio 433 MHz
En réponse à : Contrôle à distance par radio 433 MHz
Merci pour la réponse, j’ai trouvé d’où venait le problème et celui-ci a été réglé.
Répondre à ce message