 PoBot
PoBot
 Un premier robot en plexiglas
Un premier robot en plexiglasAprès presque deux ans, le robot est enfin terminé. Nous avions dû arrêter à cause de nos études. Mais le projet n’était pas enterré !
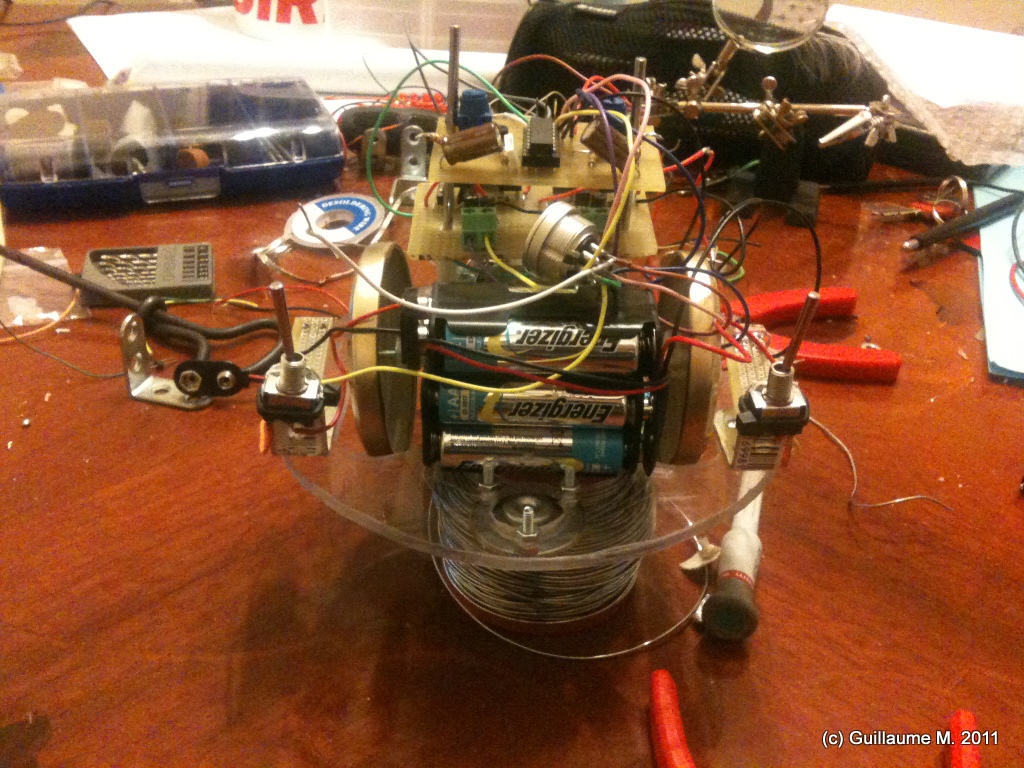
Voici quelques photos ! J’ai utilisé vos conseils de l’époque, je suis allé à Leroy Merlin acheter une plaque de plexi.

Les roues sont des pots de confiture, pas très efficace, ça glisse... Avec un élastique ça accroche un peu, mais l’élastique part très vite... J’ai pas dit mon dernier mot !
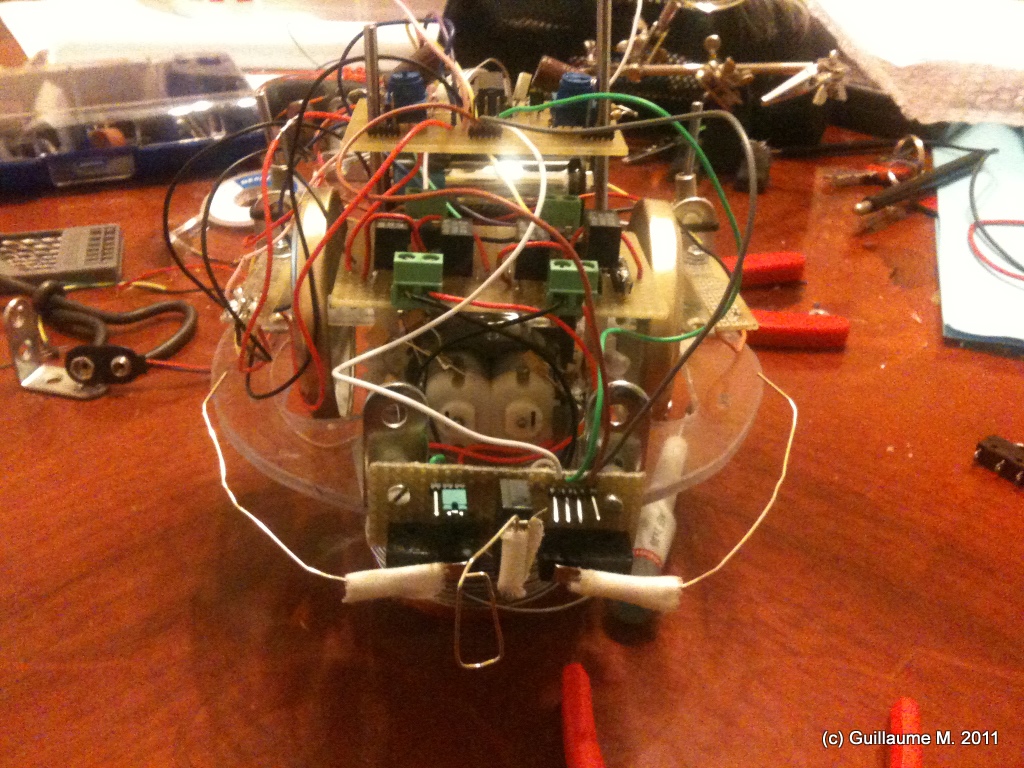
Ce robot a été réalisé en suivant le livre de Pascal Liégeois, "La robotique à la portée de tous". Pas mal pour un premier projet, on a beaucoup appris. On réalise son premier pont en H, même si des solutions finies existent, c’est bon d’apprendre ! Puis une carte tempo en utilisant un circuit intégré (CMOS 4049). On apprend à câbler un cable, etc.
Le fonctionnement du robot est simple. Il avance, quand il rencontre un obstacle, il recule puis tourne (plus ou moins suivant le réglage de la temporisation à l’aide de potentiomètres).
Le robot peut aussi être télécommandé, une petite télécommande filaire a été fabriquée.
Avec ce projet, on a vu ce qu’il était bon de faire et de ne pas faire ! Ayant fait acquisition d’une carte Arduino UNO, la prochaine étape va être de fabriquer une base roulante plus clean et modulable, on pense beaucoup à celle-ci.


Une vidéo du robot est même disponible :




