 PoBot
PoBot
 Un réseau sans-fil avec des XBee
Un réseau sans-fil avec des XBeeLes modules XBee sont des circuits de communication sans-fil utilisant les protocoles 802.15.4 et Zigbee, permettant de réaliser différents montages, d’une liaison série RS232 classique à un réseau maillé (mesh) auto-configuré.
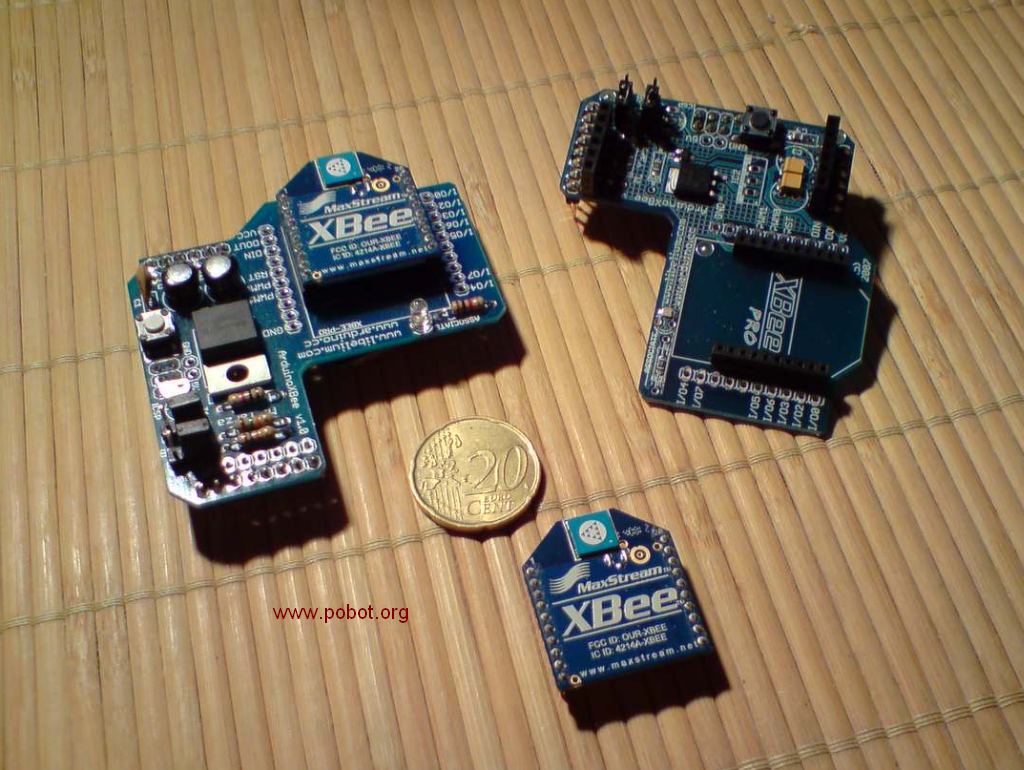
Un composant XBee série 1 coûte désormais moins de 20 euros.
Différents protocoles ont été implémentés sans que le packaging - désormais reconnaissable entre tous avec ses coins coupés - ne change. Il faut donc faire attention sur la série que vous utiliserez : le 802.15.4 des débuts jusqu’aux nouvelles Séries 2, ZNet 2.5 et ZB Zigbee. Les modules de séries différentes ne peuvent pas communiquer entre eux.
Selon les modèles et les pays, ils utilisent la bande des 2,4 gigahertz (comme le Wifi ou le Bluetooth) ou les 900 MHz. Selon leur puissance, ils émettent à une distance comprise entre 30 mètres et 1,5 kilomètre.
Ils sont développés à l’origine par la société Maxstream, devenue Digi. Vous pouvez toujours trouver en vente les premières séries du module marquée Maxstream.
Le débit peut atteindre 250 kbps, mais si on les utilise pour réaliser une liaison série sans fil, les débits standards sont compris entre 9600 bps à 38400 bps. La vitesse et la bande passante ont des effets sur les erreurs de transmission et ne sont pas possibles à obtenir dans tous les environnements.
Matériel pour un premier test
Nous allons utiliser ici des modules de la série 1, qui porte le nom du protocole IEEE : "802.15.4" (moins évolué que Zigbee mais déjà bien pratique). Pour l’usage que nous en ferons dans cet article, le modèle n’a pas d’incidence et vous pouvez réaliser ces mêmes tests avec une version 2 ou supérieure (à condition d’utiliser des XBee de la même série bien sûr).

Documentation technique
Le minimum à savoir est... minimal, car il faut surtout s’occuper de connecter les modules à vos équipements, et pas du tout besoin de savoir comment le protocole sans-fil fonctionne. C’est un peu comme pour un câble série : vous devez savoir quelle est la patte qui émet et la patte qui reçoit sans forcément vous préoccuper de la façon dont le courant électrique va traverser le fil de cuivre, même si certains devront s’en préoccuper pour des utilisations particulières.
Cette simplicité est un des principes qui ont fait le succès de ces modules, et que la société qui les conçoit s’emploie à conserver. Mais bien sûr on va aussi exploiter les possibilités de point-à-point ou de maillage (1 XBee écoutant plusieurs XBee).
Pour le détail, une datasheet est disponible sur le site de Digi ou des différents distributeurs.
Interfaces
Nous avons besoin d’interfacer le XBee avec des microcontrôleurs (pour que les robots communiquent entre eux) et aussi avec un simple PC (pour avoir une possibilité de télécommande ou de télémétrie.
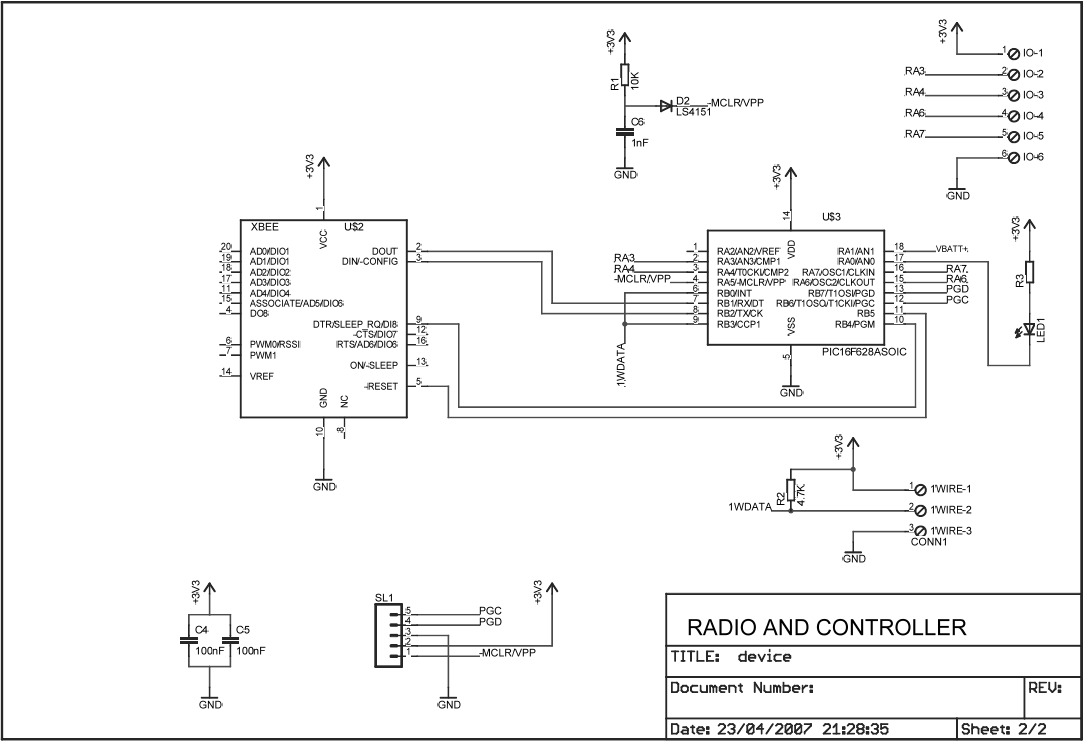
Pour se connecter avec un microcontrôleur, on va simplement relier les pattes RX,TX de notre µC aux pattes Din et Dout et alimenter le module en 3,3 volts. Quelques autres pattes sont intéressantes, nous les détaillerons ultérieurement.
Voici le schéma réalisé par Yannick pour son propre circuit. Vous pouvez vous en inspirer pour votre propre microcontrôleur mais notez que c’est vraiment simple du côté XBee, il n’y a aucun composant supplémentaire.
Alimentation
L’intérêt du protocole 802.15.4 est d’être fait pour une puissance faible, avec une consommation réduite permettant de conserver un équipement autonome pendant une année, contrairement aux équipements Bluetooth par exemple.
Donc l’alimentation est un point essentiel. Au début, c’est vrai que ce 3,3 volts est un peu embêtant, car nous sommes habitués à utiliser des composants TTL en 5V (comme nos cartes à base de microcontrôleurs Atmel). Mais on s’y fait très bien et de plus en plus d’équipements sont en 3,3 volts.
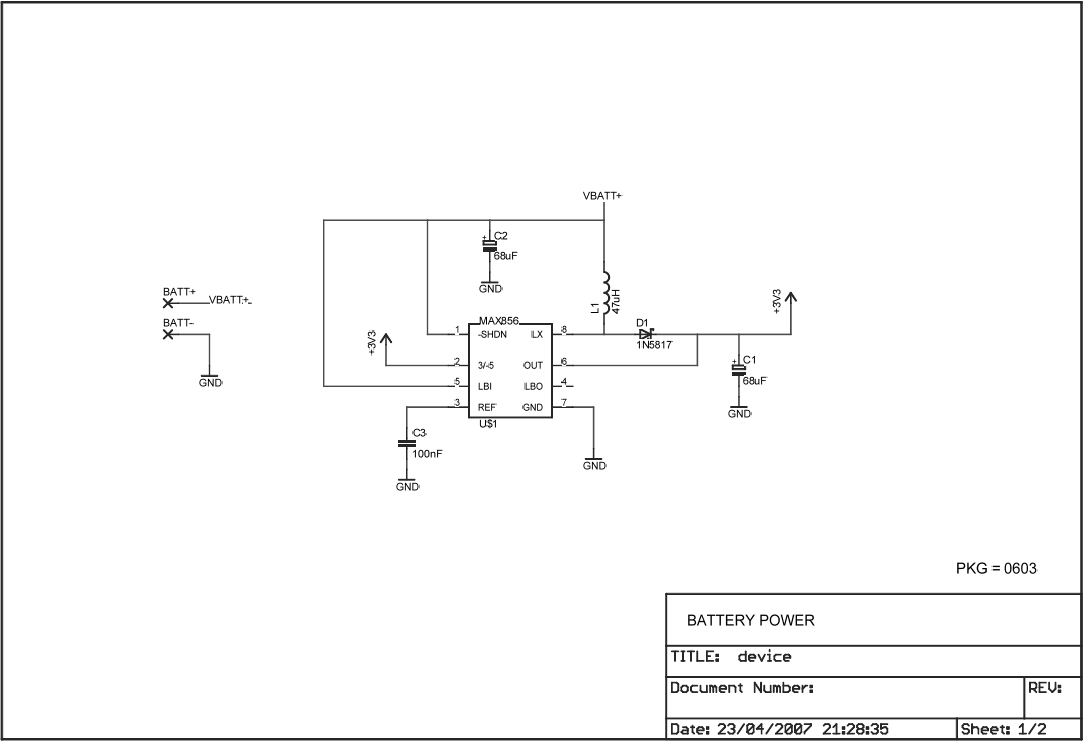
En attendant, il existe des adaptateurs entre 5v et 3,3v. Et Yannick nous propose un circuit permettant d’alimenter en 3,3 volts un module XBee à partir d’une pile grâce à un convertisseur DC-DC "step-up" (le Max856 de chez Maxim) :
Shield XBee pour Arduino
Comme nous utilisons parfois des cartes Arduino, nous pouvons également utiliser une carte d’extension dédiée aux modules XBee qui ajoute des leds, un convertisseur 3,3 volts et des cavaliers de configuration permettant de conserver la liaison USB-série : le "Arduino Xbee shield".
Son utilisation est très simple : il faut mettre les cavaliers vers l’intérieur (i.e. selon inscription "XBee/USB", se mettre en position "Xbee") et désormais les pattes RX/TX de votre Arduino sont connectées au Shield XBee. Cela implique que vous devez changer de position (USB) quand vous voulez reprogrammer la carte.
Interface avec un ordinateur
Pour se connecter à un ordinateur (PC ou Mac), on réalise très facilement un circuit adaptateur en connectant un chip USB/série au module XBee. On trouve pour quelques euros des circuits à base de FTDI qui en plus offrent des leds indiquant la mise sous tension, la transmission / réception et l’appariement avec un autre module, toutes ces choses pratiques qu’on oublie souvent.
Mais si vraiment vous voulez le faire vous-même, suivez l’exemple très bien présenté de Totof :
Jouons avec les modules XBee
Il est temps de laisser de côté tous ces fils, ces câbles, ces composants et de passer aux travaux pratiques, avec un peu de logiciel.
Premier test
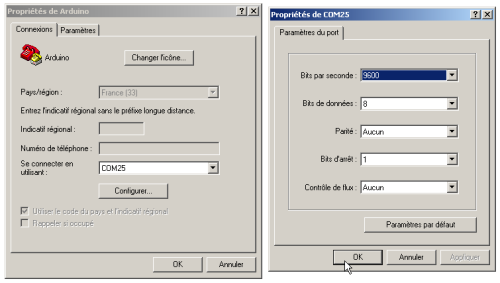
Par défaut, les circuits XBee sont faits pour se trouver tous seuls, s’apparier et fonctionner en liaison série. Les paramètres sont les suivants : 9600 bauds, pas de parité, pas de contrôle de flux, 8 bits et 1 bit de stop. On va le constater avec une Arduino.
Côté Arduino, rien d’autre que ce code :
void setup()
{
Serial.begin(9600);
}
void loop()
{
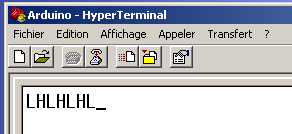
Serial.print('H');
delay(1000);
Serial.print('L');
delay(1000);
}Et côté PC, le bon vieil hyperterminal :
Le résultat est bluffant, puisqu’on dispose pour 30 euros d’une communication série sur plus de 100 mètres. Ce qui permet déjà de ressortir tous ses projets de mesure de température, alarme de boite aux lettres, etc..
Et pour un robot, on peut envisager de le contrôler ou de recevoir des tonnes de télémesures sans s’emmeler dans des fils qui s’enroulent autour :)
Second test
Mais que se passe-t-il si on utilise 3 modules ? Pour ce test, on va écrire un code avec un identifiant unique pour chacun, et un compteur.
int xbee_id = 0x01; // ou 0x02
int count1 = 0;
int count2 = 0;
int count3 = 0;Chacune des cartes mobiles émet son adresse toutes les secondes.
// toutes les secondes, envoie mon code
Serial.write(xbee_id);
delay(1000);Lorsqu’il reçoit un code, tout module doit incrémenter le compteur correspondant :
case 0x01:
count1++;
break;
case 0x02:
count2++;
break;
case 0x03:
count3++;
break;Le module relié au PC permettra d’interroger chacun des modules embarqués sur une Arduino pour connaitre la valeur de leurs compteurs, en envoyant ’ ?’ sur la liaison série.
int reception = Serial.read();
switch(reception) {
case '?':
Serial.print("(");
Serial.print(count1);
Serial.print(",");
Serial.print(count2);
Serial.print(",");
Serial.print(count3);
Serial.println(")");
break;
...
}Ainsi, on va pouvoir observer ce qui se passe en allumant et éteignant successivement un ou plusieurs modules.
Une fois chargé les programmes dans chacune des Arduino (en pensant à passer en mode USB pour le transfert et à changer l’ID dans le code avant compilation), on peut ouvrir un terminal série (ici, Docklight pour visualiser les valeurs décimales, hexadécimales ou ASCII) et observer ce qui se passe.
Tout d’abord, le GRAND avantage des XBee, c’est que les programmes ne plantent pas quand la connexion série est rompue, par exemple quand on éteint un des modules : la liaison série sur le microcontrôleur n’est pas ouverte avec un module précis mais avec le module XBee directement connecté, qui lui reste alimenté puisque branché sur la même alimentation. C’est vraiment pratique car le plus embêtant dans une liaison série classique, c’est de débrancher la carte et de faire planter tout le programme par une bête exception (ok, ça peut se gérer mais bon...)
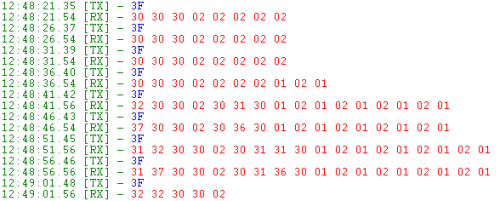
Voici le résultat en images de ce second test. On a paramétré Docklight pour qu’il envoie le caractère ’ ?’ sur la liaison série du module USB toutes les 5 secondes.
Tout d’abord, on va allumer l’Arduino 01 : au bout de 2 secondes, on commence à recevoir ses "bips" (c’est notre Spoutnik moderne) puisqu’on observe 5 "01" (1 par seconde) dans la console en mode hexadécimal.
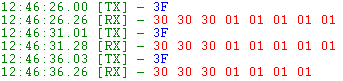
On éteint l’Arduino 01 et on allume l’Arduino 02 :
Pareil, 5 ’02’ sans avoir rebooté le module connecté à l’USB ! après un temps de démarrage de quelques secondes (promis, la prochaine fois je sors l’analyseur logique).
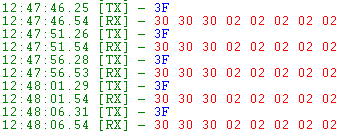
Premier test "critique" : on rallume l’Arduino 01, les deux sont donc allumées en même temps, soit 3 modules XBee en fonction. C’est éloquent : on reçoit à la fois les 01 et les 02 sur notre module branché au PC.
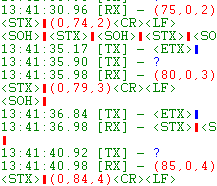
Second test "critique" : qui de la réception ? On va émettre depuis le PC l’identifiant ’03’ (Docklight nous permet de le faire juste en cliquant sur un bouton paramétré) :
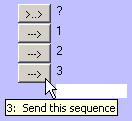
Et bien ça marche : on s’aperçoit que les deux cartes Arduino ont incrémenté leur compteur n°3, preuve que le caractère a été reçu par les 2 modules.
Conclusion
On a donc SANS AUCUNE CONFIGURATION fait communiquer ensemble 3 cartes distantes de plusieurs mètres, de manière bidirectionnelle et multi-réception : ce qu’un module envoit, tout le monde peut le recevoir.
Il est donc désormais facile d’imaginer de contrôler des robots mobiles en envoyant à la fois des consignes communes de synchronisation puisque chacun des XBee va recevoir le message, ou bien en envoyant l’identifiant du module ciblé, d’en contrôler un en particulier, tout en laissant les autres robots libres de connaître les consignes envoyées.
C’est un grand progrès qui est accessible à tout le monde. On verra prochainement comment protéger tout ça en limitant la réception à des modules appariés, ou à un groupe de modules qui partage le même identifiant de groupe.






Vos commentaires
# Le 14 juillet 2021 à 16:16, par Ghada En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Est-il possible de téléverser un code Arduino via les modules Xbee dans la carte Arduino !!
# Le 26 octobre 2023 à 23:44, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Ca parait difficile car le bootloader est à l’écoute sur la liaison USB à priori. Mais peut-être pas impossible si on arrive à rediriger les signaux d’une manière ou d’une autre. Mais pas la moindre idée de comment parvenir à cela.
Répondre à ce message
# Le 18 juin 2014 à 21:53, par paola En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
bonsoir à tous
compte tenu de la date de la dernière publication, je ne sais pas si mon message aura toujours une raison d’être mais bon, j’essaie toujours.
en fait je dois réaliser un projet dans lequel je dois utiliser des capteurs et contrôler les résultats avec un microcontrolleur, notamment une carte arduino mega 2560.et tout cela par le biais de 2 modules xbee
ma question est la suivante :
est-il possible de relever 3 signaux simultanément (car j’utilise 3 capteurs dont je dois connaitre les états en un même temps).. et si oui, est il plus pratique de brancher les capteurs sur la carte arduino ou sur un xbee( je ne dispose que d’une seule carte arduino)
merci beaucoup, votre réponse me sera plus que favorable
# Le 18 juin 2014 à 22:42, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonsoir,
Si je comprends bien, vous avez :
1/ une Arduino qui sert à traiter les informations fournies par 3 capteurs
2/ 2 modules XBee pour les faire communiquer avec l’Arduino
Si c’est bien cela, les capteurs ne peuvent donc pas être branchés directement sur l’Arduino, mais seront obligatoirement connecté au XBee distant. Celui-ci enverra par radio les mesures à l’autre XBee, relié à l’Arduino qui traite les données.
Eric
Répondre à ce message
# Le 27 janvier 2018 à 17:11, par Juste En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
j’ai lu votre tutoriel avec attention mais j’ai une question. Je fais actuellement un projet pour faire communiquer deux xbee serie 1 connectés avec Arduino UNO. Mais je n’ai pas d’Adaptateur USB Xbee donc j’ai directement utilisé des fils pour relier le Xbee à l’Arduino. Mon problème c’est que le cable USB que j’utilise ne marche plus et je ne peux plus configurer le xbee (lié à l’Arduino) avec le XCTU. J’en ai acheté d’autres sur place mais aucun résultat donc je suis bloqué pour la suite de mon projet. Je ne sais pas si ce problème est récurrent. Merci de bien vouloir m’aider si possible.
Bon week-end...
# Le 4 février 2018 à 23:12, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
Avez-vous bien pris les précautions liées au fait que l’Arduino gère des signaux en 5V alors que le XBee n’accepte que des signaux en 3V3 ? Si vous avez relié directement les Rx/Tx du XBee et de l’Arduino, il y a de fortes chances que vous ayez endommagé irrémédiablement votre XBee 😕
Cordialement
Répondre à ce message
# Le 13 mai 2017 à 16:08, par jihed En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
bonjour ,j’ai un question a la carte xbbe
quelle est la nature de la carte xbee qui reliée a une automate 500 ? et pourquoi en utilise cette type de la carte ?? et merci
# Le 1er juin 2017 à 15:44, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Je ne sais pas ce qu’est l’automate 500 que vous mentionnez. Désolé 🙁
Cordialement
Répondre à ce message
# Le 3 mai 2017 à 02:44, par Anashe En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
J’ai pour projet de faire communiquer deux modules xbee séparés d’une distance d’environs 8 km (conditions réelles, du coup environs 15 à 20 km conditions idéales) sur la fréquence 868 Mhz.
Quel est le modèle Xbee le plus adaptéé à un tel projet ou qui puisse juste supporter d’etre relié à une antenne (outdoor) à haut gain.
Merci d’avance
# Le 6 mai 2017 à 11:20, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
Pour ce genre de question, le plus fiable est d’aller à la source de l’information, à savoir le site de fabricant du produit : https://www.digi.com/lp/xbee
De plus le choix du modèle n’est pas le seul paramètre, le type d’antenne ayant une influence conséquente. Une antenne Yagi par exemple permettra des portées bien plus importantes qu’une antenne omnidirectionnelle classique. Tout dépend donc aussi du contexte d’utilisation.
Cordialement
Répondre à ce message
# Le 14 mars 2017 à 11:49, par aybdeb En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour tt le monde ,
j’espere que ce site soit encore valide ,
enfaite j’ai un projet de pfe (bac 2) , qui consiste à commander des coffrets ( amperage peut aller à 400 A) des block d’une établissement où on a 4 block en principe , je doit commander ces block à distance via des xbee pro (off/on) , toute en prelevant la consommation électrique en temps réel afin de la transferer par xbee pro vers mon ordi et l’afficher sur interface LABVIEW
j’ai réflechie a une solution ARDUINO XBEE PRO et je voudrais juste savoir est ce que c je doit utiliser des relais et des capteurs pour commander les bobines allimentants le coffret à travers arduino dans chaque blocks , ou je peut utiliser juste des capteurs xbee dans chaque blocks et un xbee arduino cote pc .
Merci pour vos aides
# Le 18 mars 2017 à 13:35, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Le site est toujours valide 🙂
Attention : commander des intensités aussi élevées ne peut pas se faire à la légère, et il faut utiliser des dispositifs adaptés. Je suis étonné qu’on vous fasse travailler sur un problème de ce type dans le cadre d’un PFE car il y a réel danger.
Vous abordez pêle-mêle plusieurs questions et pas facile d’y donner une réponse, car les éléments fournis sont un peu confus. On va essayer quand même.
Les XBee (Pro ou pas, le Pro n’étant nécessaire que si la distance de communication nécessite leur puissance radio plus élevée) sont en théorie tout à fait utilisable pour communiquer aussi bien les commandes que les lectures. Attention cependant au fait qu’une armoire de commande est en général métallique, et que par conséquent les ondes radio n’y pénètrent pas. Ce qui veut dire qu’il faut déporter l’antenne du XBee à l’extérieur.
Pour ce qui est des relais, comme dit plus haut c’est indispensable, et il faut des modèles industriels haute puissance.
Concernant la remontée des consommations, vous ne dites pas de quelle manières elles sont mesurées. Impossible d’en dire plus sur ce sujet par conséquent.
Cordialement
# Le 20 mars 2017 à 11:11, par aybdeb En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
d’abord je vous remercie infiniement pour votre réponse sur mon projet ,
concernant le sujet , il consiste à prelever la consommtion électrique en temps réel de plusieur coffrets , ainsi de les commander (off/on), la façon que j’ai proposé c’est d’utiliser dans chaque bloque des capteurs de courants et des relais en utiilisant arduino où implanter le programme qui va gerer ce aller -retour d’information.
en discutant la proposition , j’ai trouvé que la solution arduino n’est pas robuste , anisi que la solution des relais doit etre ameliorer et chercher si il y un alternatif .
est ce qu’il y a autre solution que arduino pour gerer cette commande ?
est ce qu’il y autre solution autre que relais pour commander ces coffret puissant ?
N.B : la solution proposé à ameliorer :
1. coté coffret : xbee pro + arduino + reais + capteur de courant
2 . coté ordinateur : xbee pro
Cordialement
# Le 22 mars 2017 à 23:40, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
En quoi la solution Arduino ne serait-elle pas robuste ? Une carte Arduino ce n’est ni plus ni moins qu’un micro-contrôleur mis à disposition dans un format facile à utiliser pour qui n’a pas la possibilité de réaliser un circuit imprimé. Mais le micro-contrôleur est rigoureusement identique aux modèles qu’on peut trouver au coeur de produits largement diffusés.
Pourriez-vous préciser pour quelle raisons vous estimez la solution non robuste et sur quelle expérience personnelle vous vous basez pour l’affirmer.
« est ce qu’il y autre solution autre que relais pour commander ces coffret puissant ? »
Un triac par exemple, si possible opto-couplé pour garantir l’isolation galvanique entre le circuit de puissance et le circuit de contrôle. Mais ceci étant, c’est plus délicat à mettre en oeuvre que le relai. Quelles sont les raisons qui vous font écarter le relai ?
Ceci étant, compte tenu du manque d’expérience que vos questions tendent à montrer, je suis étonné qu’on vous fasse travailler sur une application à fort courant et haute tension. Au vu de ce que vous décrivez il y a de réels risques d’accident mortel si on n’a pas une parfaite connaissance de ce qu’on fait.
PS : essayez SVP de relire vos messages avant de les publier pour en corriger les fautes d’orthographe et de grammaire autant que faire se peut, car il faut parfois s’y reprendre à plusieurs fois pour décrypter 🙂 Merci d’avance pour les autres lecteurs.
Répondre à ce message
# Le 30 juin 2016 à 14:46, par edmarc En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
Dans le cadre d’un projet scolaire je voudrais savoir combien de capteur/actionneur je peux connecté à un module Xbee ?
Merci d’avance
# Le 18 août 2016 à 18:46, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Déjà répondu à cette question dans un autre article sur le XBee.
Evitez le cross-posting : ça ne fait pas aller les choses plus vite 😉
Répondre à ce message
# Le 18 décembre 2014 à 20:18, par diamse En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
bonjour je souhaiterai d’être aider . En faite je faisais communiquer deux modules xbee series2 et à un certain moment j’ ai perdu la liaison entre les deux xbee.
le deuxième xbee ne répond plus même si je l ’envoie la commande(+++) à partir de sa propre terminal.
# Le 20 décembre 2014 à 18:46, par Julien H. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
Il faut d’abord vérifier l’alimentation du circuit et utiliser un adaptateur USB pour reconfigurer le XBee avec X-CTU. Si ça ne fonctionne plus, c’est qu’il est grillé.
Cordialement,
Julien.
Répondre à ce message
# Le 20 juin 2014 à 21:51, par paola En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
bonsoir,
il se trouve que je n’ai à manipuler que des grandeurs numériques.
si cela concernait que deux xbee, là il n’y a pas de problème, pas besoin de passer sur un quelconque microcontrolleur, donc pas de configuration de l’arduino, car ATD0 3 avec ATD0 4 du récepteur et ainsi de suite. mais mon problème c’est quand ca passe à l’arduino car mon code a besoin de :
if (Serial.read(signal1)=="HIGH" && Serial.read(signal2)=="HIGH")
//allumer led vert
else
//allumer led rouge et faire sonner alarme
merci beaucoup
# Le 24 juin 2014 à 09:22, par Julien H. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
Les XBee ne fonctionnent pas de cette manière, ni Arduino d’ailleurs. On ne peut pas passer d’argument à la fonction Serial.read() pour indiquer quel signal on souhaite recevoir.
De plus, cette fonction retourne un octet (byte) et pas une chaîne de caractères ("HIGH"). D’ailleurs je doute qu’on puisse tester avec == l’égalité des chaînes.
Cordialement,
Julien.
# Le 24 juin 2014 à 10:24, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
Bonjour,
Cette discussion s’est poursuivie par mail du fait du nombre des échanges, et j’ai effectivement expliqué à Paola que les choses ne fonctionnent pas du tout comme cela.
De plus le problème semblant ne porter que sur des signaux logiques, j’ai suggéré de configurer tout simplement les XBee en IO passing, ce qui revient à connecter virtuellement les capteurs directement sur les IO de l’Arduino, et permet ainsi de ne pas avoir à gérer une communication série avec le XBee.
Eric
Répondre à ce message
# Le 20 juin 2014 à 07:37, par paola En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
bonjour,
effectivement j’ai exactement 2 modules xbee et une carte arduino mega 2560.
je dois relier les 3 capteurs sur le module distant et traiter ensuite ces informations par le biais de la carte arduino.
seulement, mon problème est le suivant. comment différencier ces 3 signaux à la réception. le buffer de réception ne supporte qu’une seule donnée à la fois.
je m’exprime autrement :
en gros je voudrais avoir à la réception :
Serial.read(signal1) ;
Serial.read(signal2) ;
Serial.read(signal3) ;
chose qui est pratiquement impossible car les commandes de l’’arduino ne permettent de faire que : Serial.read("qu’un seul signal")....
dans la mesure du possible, par faute de temps, j’évite d’opter pour le mode API ou la reconstitution des trames, je dois en fait finir le projet dans à peine une semaine.
je vous conjure de bien vouloir me donner des idées je vous prie.
Paola Elodie
# Le 20 juin 2014 à 09:50, par Eric P. En réponse à : Un réseau sans-fil avec des XBee
En réponse à : Un réseau sans-fil avec des XBee
La lecture des signaux analogiques ne marche pas du tout comme cela. Le XBee utilise un protocole propre qui véhicule les valeurs de la (ou des) entrée(s) qu’on veut échantillonner via une structure de message définie dans sa documentation.
Le Serial.read va permettre de lire se message en ensuite d’en extraire les mesures effectuées.
Il faut également pour cela configurer le XBee de manière à spécifier quelles sont les ADC qu’on souhaite activer, avec quelle périodicité les mesures doivent être faites et transmises,...
Il vous faut donc étudier la documentation du XBee (disponible sur le site du fabricant ainsi que sur le nôtre) ainsi que les divers articles que nous avons publiés sur le sujet.
Cordialement.
Répondre à ce message