 PoBot
PoBot
 Trouver le neutre d’un servomoteur modifié
Trouver le neutre d’un servomoteur modifiéLorsqu’un servomoteur a été modifié pour tourner continuellement (on parle de "rotation continue"), on perd l’asservissement en position. Le circuit électronique fait une lecture figée du potentiomètre (ou des résistances selon la nature de la modification) et n’atteint donc jamais la position que vous lui demandez d’atteindre.
Explications pour modifier un servomoteur en rotation continue
La première étape lorsqu’on reçoit un servomoteur à rotation continue ou qu’on en fabrique un est de déterminer quelle est la valeur du "neutre", soit la consigne à envoyer pour que le moteur ne tourne plus.
Note : certains parlent de "servomoteurs à 360°" mais le terme de "rotation continue" est plus explicite. De plus il y a réellement des servomoteurs non modifiés qui peuvent réaliser un grand angle de rotation (parfois même plus d’un tour) donc il faut éviter les confusions.
Principe
Le signal typique d’un servomoteur a une largeur à niveau haut variable entre 1 et 2 millisecondes : on pourrait croire que le neutre est à 1,5 millisecondes mais ce n’est pas toujours le cas, selon la qualité de la modification et des composants utilisés (potentiomètre fixé ou résistances produisant une division de la tension).
Avec le logiciel Arduino, c’est exactement la même chose : le développeur ne voit pas la largeur du signal en millisecondes, mais demande un angle entre 0 et 180. Or un servomoteur à rotation continue ne va pas s’arrêter à une consigne de 90 !
Raison
On pourrait penser qu’il suffit de couper le signal du servomoteur pour arrêter la roue. Sauf que la plupart des servomoteurs de modélisme standard ont un asservissement qui varie selon l’écart entre la position courante lue sur le potentiomètre et la consigne du signal que la radiocommande ou le contrôleur envoie : plus l’écart est grand, plus la vitesse de rotation est grande. Donc si vous utilisez ces servomoteurs modifiés pour propulser un robot, vous ne pouvez pas simplement utiliser une consigne pour avancer et une consigne pour reculer. En plus il faut inverser les deux consignes, car généralement les moteurs sont disposés en miroir et le sens de rotation est différent pour chacune des roues lorsqu’on souhaite avancer dans la même direction.
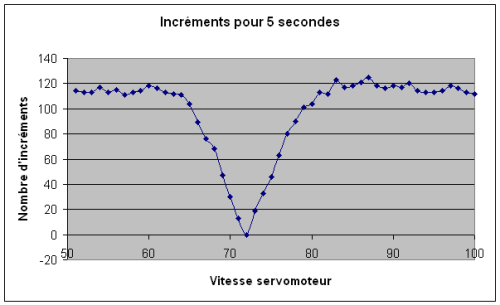
Enfin, il est intéressant de connaitre ce neutre afin de réaliser un contrôle de vitesse automatique : vous utilisez les valeurs de consigne autour du neutre pour obtenir des vitesses plus ou moins rapides (voir les graphes sur nos autres articles). Avec des formules d’asservissement, le développeur n’a pas forcément la maitrise de l’arrêt des roues : en donnant une vitesse moyenne et un cap, le contrôleur va en déduire la vitesse de chacune des roues à tout instant, il faut donc être bien certain de la valeur du neutre.
Code source
Il y a plein de façons différentes, je vous donne celle que j’avais imaginée il y a deux ans lors de la réalisation du Pobot Easy.
/**
* @author Julien Holtzer - julien.holtzer@gmail.com
* @date 23-05-2009
*
* This code is intended to test the "zero" position of a 360� servomotor.
* Modified servomotor Futaba S3003 used on the Pobot Easy mobile robot
* is turning continuously in one direction or another depending on the
* standard servo command.
*
* Considering that a Servo (in standard Arduino 0013 library) can receive
* an angle in degree as command between 0 and 180, the zero should be 90,
* but due to the physical modification, it isn’t that simple.
*
* This code will help the user to test several values sent via a serial terminal
* for tuning the control software of any robot using this kind of modified servo.
*/
#include <Servo.h>
// servo object representing the motor
Servo serv ;
// servo connection to the Arduino (digital output 9 or 10)
int servPin = 9 ;
// default value that will be updated when the user sends a new value
int valeur = 90 ;
void setup()
// configure your serial terminal to 9600, N, 8, 1 (standard configuration for Arduino)
Serial.begin(38400) ;
// attach the servo with standard values
serv.attach(servPin) ;
void loop()
// test if a new value has been received
if (Serial.available())
// update without any control
valeur = Serial.read() ;
// update the command of the servo
serv.write(valeur) ;
// confirm the current value (equivalent to a servo position but continously rotating)
Serial.print("> position : ") ;
Serial.print(valeur) ;
Serial.println() ;
// 1/2 second delay to avoid saturation (don’t update values more than twice per second)
delay(500) ;





Vos commentaires
# Le 5 mai 2016 à 23:56, par Malk En réponse à : Trouver le neutre d’un servomoteur modifié
En réponse à : Trouver le neutre d’un servomoteur modifié
Bonjour,
apres modification de mon servo (MG995) en rotation continue, j’ai pu trouver la position neutre (136 degré pour des resistances de 2,2ko) mais la valeur semble changer apres plusieurs minutes d’utilisation (137...138....puis 140) :le dechargement progressif des piles peut il en etre la cause ?
# Le 18 mars 2017 à 14:20, par Eric P. En réponse à : Trouver le neutre d’un servomoteur modifié
En réponse à : Trouver le neutre d’un servomoteur modifié
En fonction de la qualité des composants, il n’est pas impossible qu’une dérive soit constatée, notamment si la température évolue (la valeur réelle d’une résistance change avec sa température).
L’hypothèse de l’influence de la tension est également très plausible.
Cordialement
Répondre à ce message