 PoBot
PoBot
 Rotation supérieure à 360° pour un servomoteur
Rotation supérieure à 360° pour un servomoteurCet article présente différentes solutions pour obtenir un asservissement en position d’un servomoteur de modélisme, de 360° ou au-delà.
Attention, il ne s’agit pas d’obtenir une rotation continue, car on perd dans ce cas l’asservissement en position. Cette solution a d’ailleurs été décrite dans d’autres articles.
La modification d’un servo standard
Sur le robot de la Coupe de France 2008, nous avions besoin de renverser une turbine sur un bras afin de pouvoir à la fois attraper des balles sur le terrain devant le robot, puis de les passer à un lanceur situé à 20 centimètres de haut à l’arrière du robot, ce qui nécessitait un retournement complet.
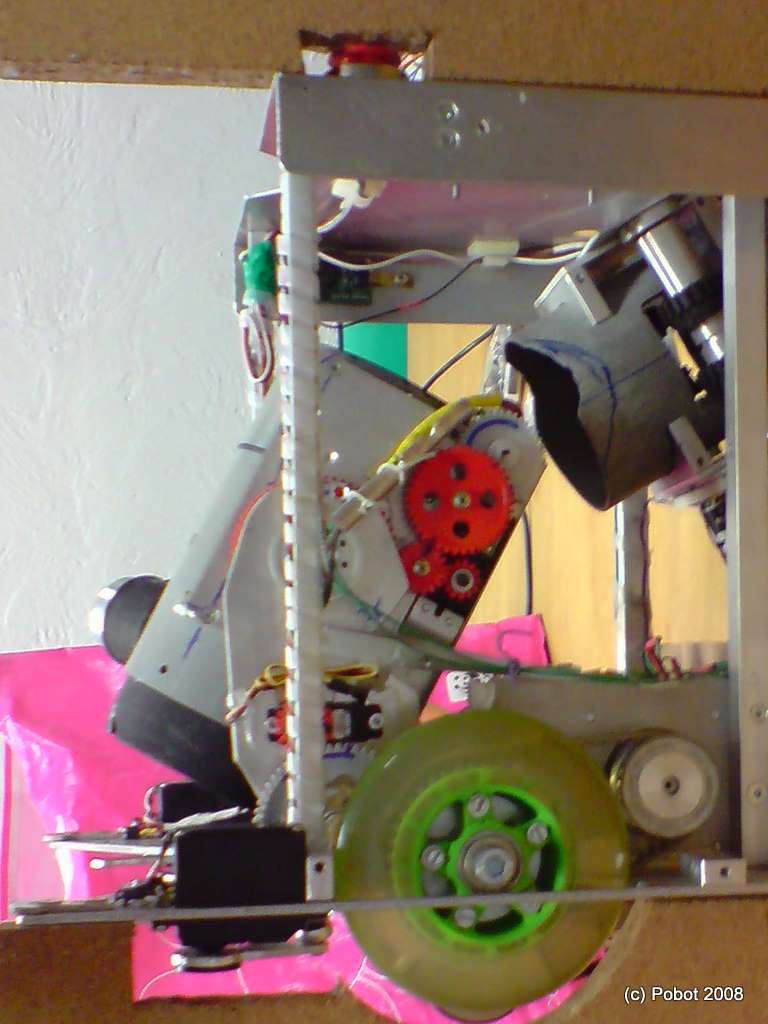
Notre problème n’était pas tant l’angle de rotation à exécuter (180°) que le couple nécessaire pour faire tourner un tube PVC + un châssis en aluminium + une turbine EDF et son moteur + l’électronique complète de commande.
Henri a eu l’excellente idée d’utiliser des engrenages pour démultiplier la rotation, le servomoteur devant alors faire plusieurs tours afin de lever totalement l’engin.
Le problème de rotation avec asservissement en position a été résolu en sortant complètement le potentiomètre qui permet à l’électronique du servo moteur d’atteindre la position souhaitée par la commande, et en le plaçant sur l’engrenage final qui réalisait le demi-tour.
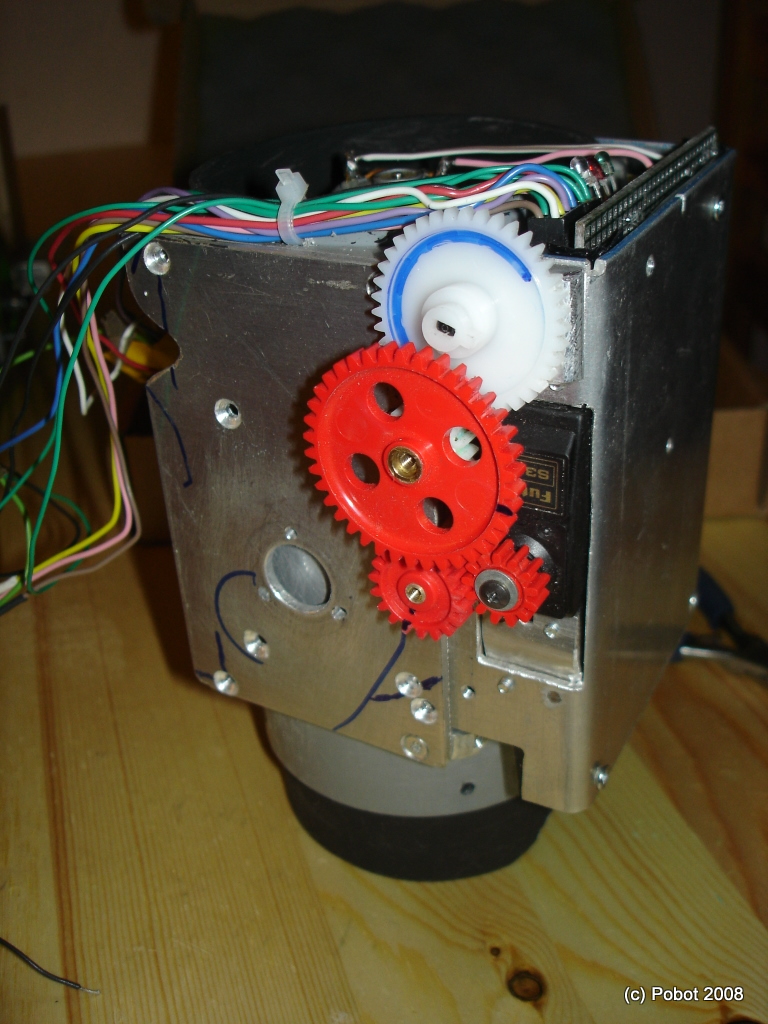
Sur les deux premières photos, on voit bien le potentiomètre (carré noir) en haut du servomoteur. C’est bien le servo d’origine, sur lequel on place un engrenage qui s’adapte au méplat de l’axe du potar et le fait tourner en même temps qu’il est entrainé par la démultiplication rouge.
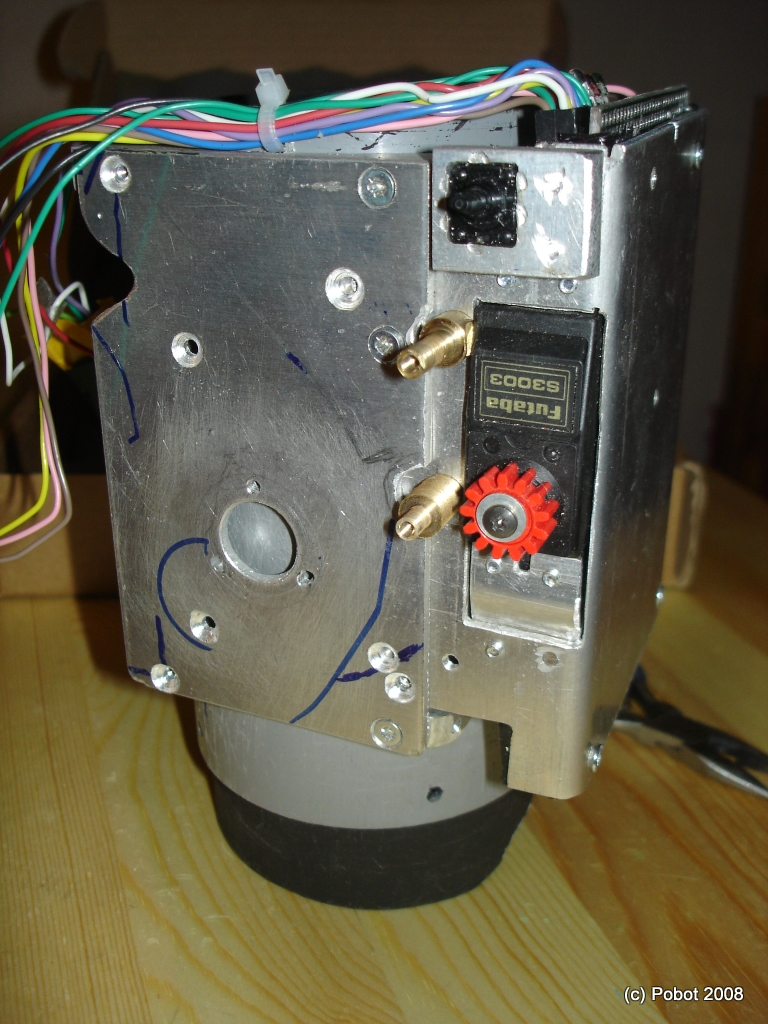
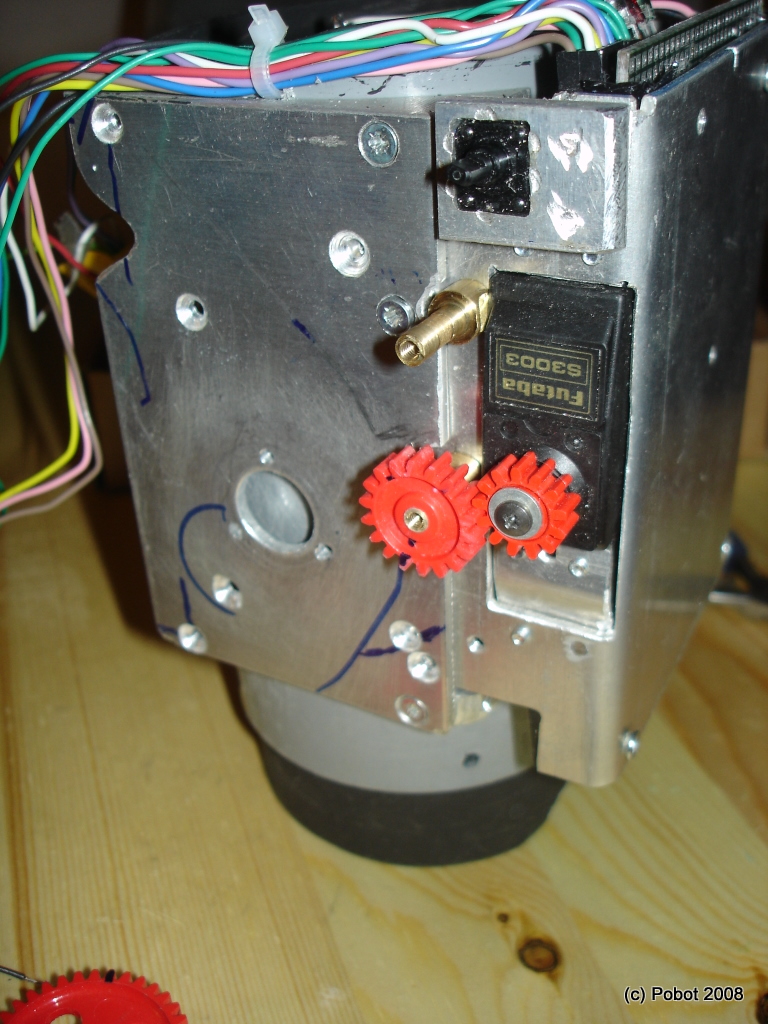
Le trait de feutre bleu montre la course du potentiomètre, dans les limites d’un Futaba S3003 classique.
Génial, non ? Vous pouvez essayer de reproduire un système similaire pour atteindre l’angle souhaité, même s’il est très grand. Vous pouvez utiliser un potentiomètre qui fait plusieurs tours, tant que vous respectez la même valeur de résistance totale que le potar du servomoteur.
Question de couple
Si vous utilisez des engrenages, il faut surveiller le changement de vitesse et le changement de couple. Si vous perdez en vitesse, vous gagnez en couple, et inversement.
Pour vous assurer du résultat sur l’axe final par rapport au moteur, on utilise le logiciel Yenka (dont nous disposons d’un grand nombre de licences, merci au sponsor).
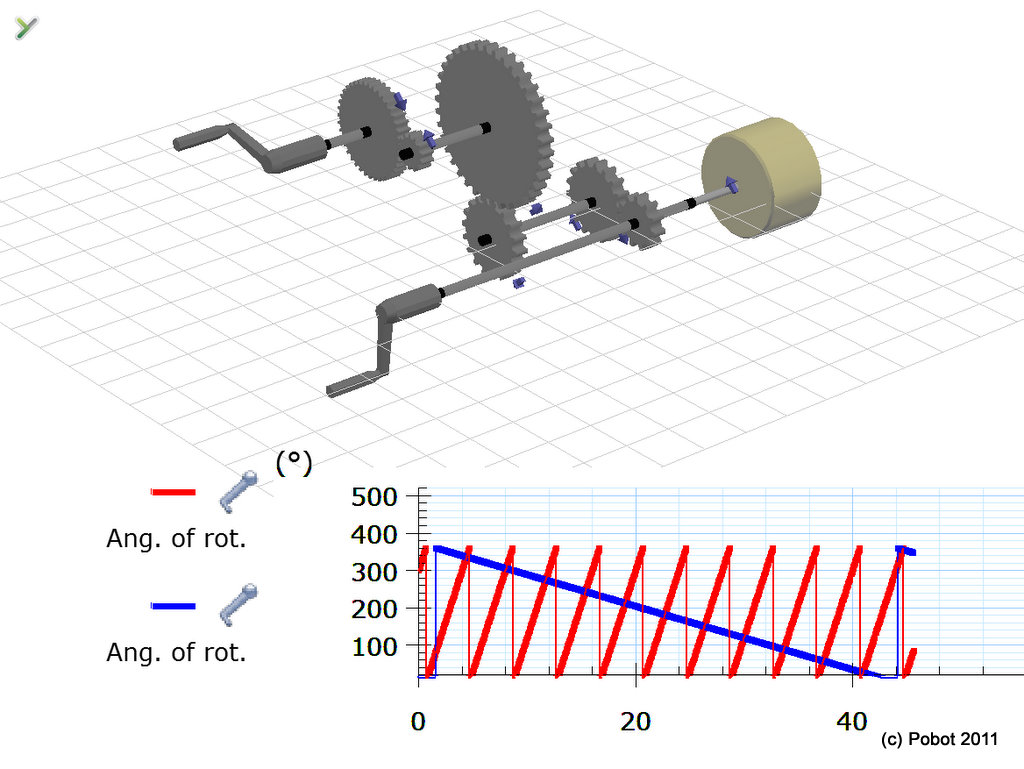
Chaque engrenage s’ajoute et se relie au précédent (par paire, ce qui crée parfois des doublons mais tant que le nombre de dents est le même, ça va).
On utilise une manivelle pour bien voir la rotation (même si une petite flèche est présente pour donner le sens) et on utilise un moteur pour tourner en permanence (vous pouvez régler la vitesse).
Ensuite on ajoute un graphique et on trace les vitesses de rotation.
Autres modifications
Il y a bien sûr d’autres solutions :
– ajouter des encodeurs (anglais, avec vidéo)
– utiliser un servomoteur numérique complexe




