 PoBot
PoBot
 Rotation continue avec un servomoteur
Rotation continue avec un servomoteurModifier un servomoteur pour permettre une rotation continue est un exercice fréquent pour un roboticien amateur. Il y a plusieurs façons de le faire, et bien sûr tout dépend des compétences de chacun. Celle que je vous propose est originale : pas de soudure, pas de composants supplémentaires, rien qu’une pince, un tournevis et un peu de colle forte.
On dit parfois "à 360°" mais attention, vous perdrez le fonctionnement classique du servomoteur, c’est-à-dire la possibilité de donner une consigne d’angle et qu’il atteigne cette angle. A la place, la consigne d’angle envoyée au servomoteur lui donnera une vitesse de rotation différente, dans un sens ou dans l’autre.
Une fois modifié, vous pourrez utiliser un programme comme cet exemple pour déterminer la consigne qui arrête le moteur de tourner.
Le résultat
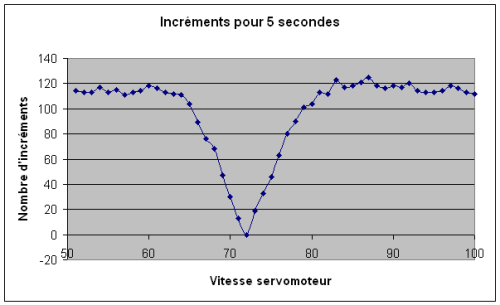
Pour vérifier le bon fonctionnement de mon servomoteur modifié (la répétabilité de sa rotation selon une vitesse donnée), j’ai fixé une roue avec des encodeurs (c.f. le Pobot Easy) et j’ai mesuré le nombre d’incréments en 5 secondes à chaque vitesse demandée. Plus la vitesse est grande, plus on a d’incréments.
Les étapes
Tous les servomoteurs ne conviennent pas. J’ai utilisé un classique Futaba S3003 qui a l’avantage d’être en plastique et d’avoir des composants accessibles et facilement démontable.
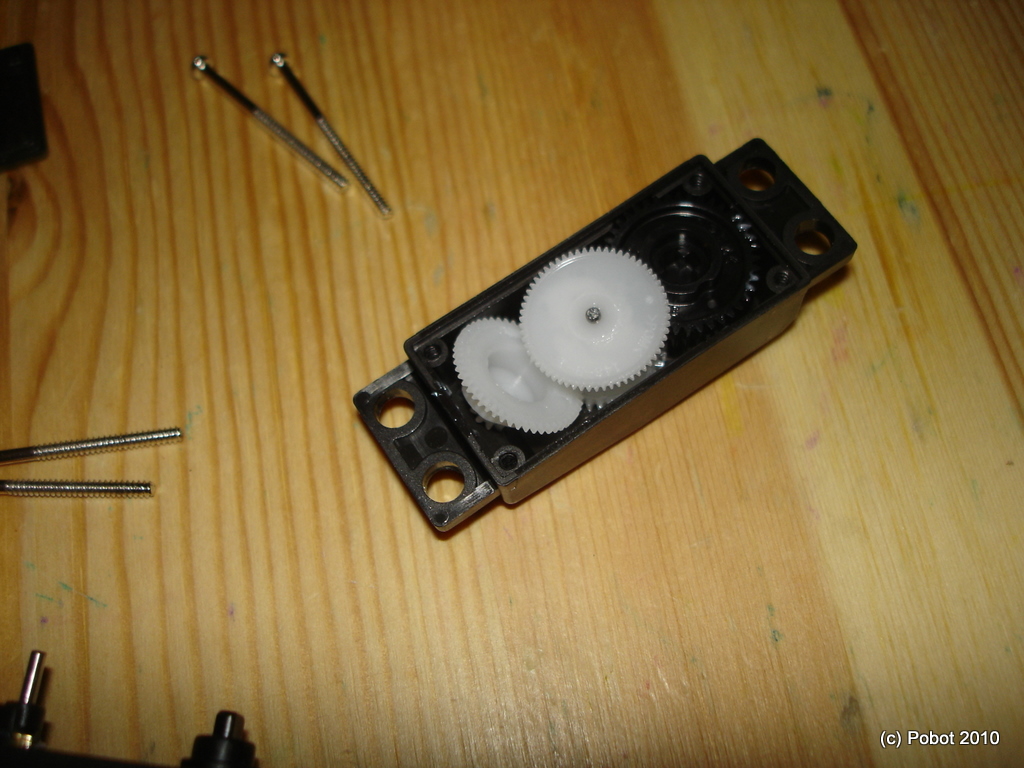
Ouvrez le servomoteur (4 longues vis dessous) et enlevez les deux capots : celui du bas qui dévoile l’électronique et celui du haut qui contient les engrenages : ne les perdez pas et notez leur disposition !
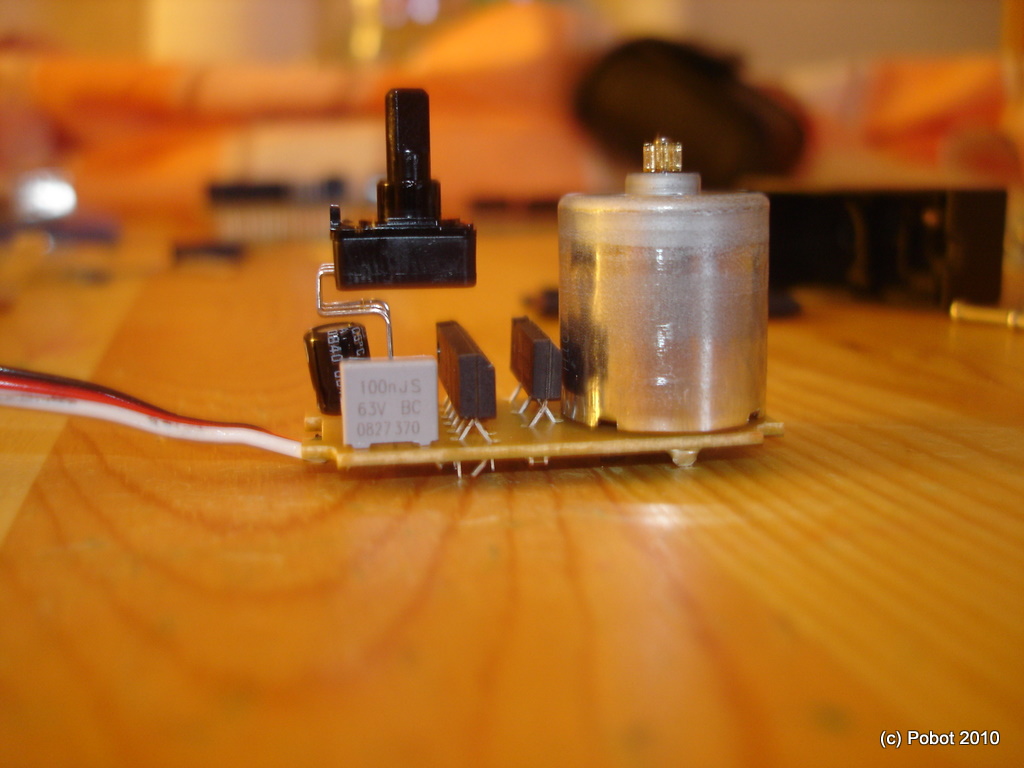
Voici l’intérieur du servomoteur : un moteur à courant continu (à droite) et une électronique de contrôle avec un gros potentiomètre.
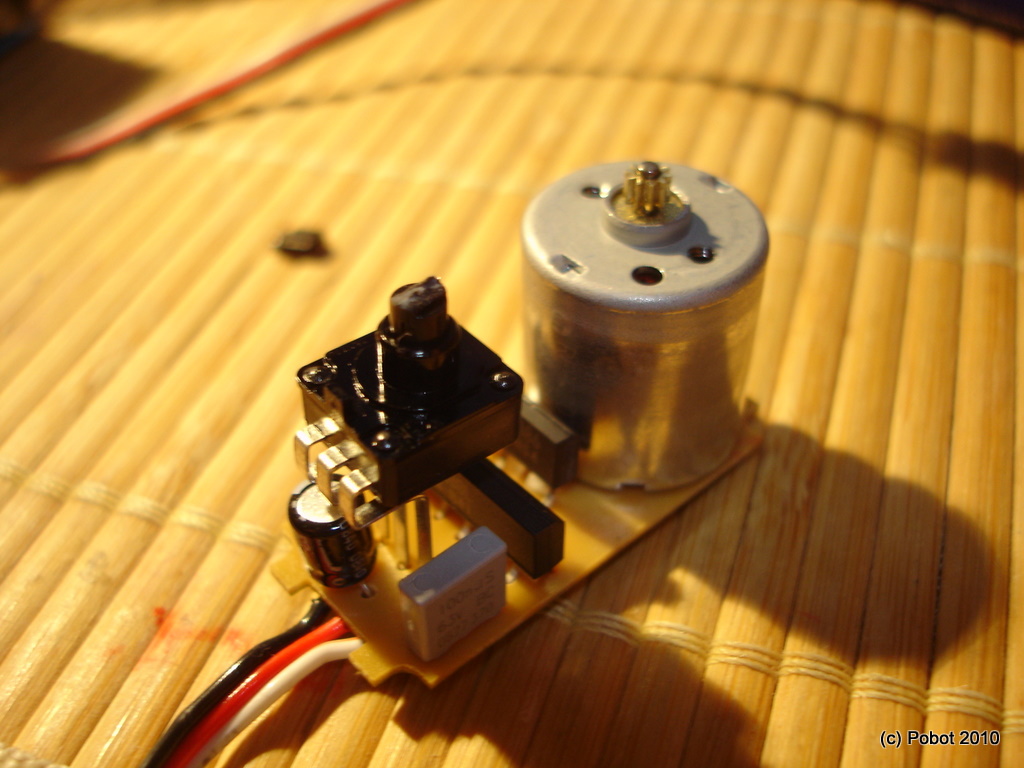
La première modification consiste à couper la tête du potentiomètre, pour qu’il ne tourne plus lorsque le servomoteur fonctionne. Avec un point de colle, fixez la position médiane : il suffit d’alimenter le servomoteur et lui donner la consigne correspondant à l’arrêt, et faire tourner le potentiomètre jusqu’à ce que le moteur s’arrête.
La seconde modification consiste à supprimer un ergot en plastique sur un des engrenages, et selon les modèles l’ergot correspondant dans le capot.
Remontez le tout, en vérifiant que le potentiomètre n’a pas bougé (sinon recommencez le centrage).
Et si on y arrive pas ?
Vous pouvez acheter le servomoteur déjà modifié, disponible chez EasyRobotics pour seulement 5,60 euros de plus que le servomoteur standard.





Vos commentaires
# Le 1er septembre 2011 à 22:28, par ? En réponse à : Rotation continue avec un servomoteur
En réponse à : Rotation continue avec un servomoteur
Petite correction : la phrase "La première modification consiste à couper la tête du servomoteur, pour qu’il ne tourne plus lorsque le servomoteur fonctionne" devrait être : "La première modification consiste à couper la tête du potentiomètre, pour qu’il ne tourne plus lorsque le servomoteur fonctionne"
# Le 4 septembre 2011 à 15:12, par Julien H. En réponse à : Rotation continue avec un servomoteur
En réponse à : Rotation continue avec un servomoteur
Bien vu ! Merci beaucoup :)
Répondre à ce message
# Le 30 septembre 2017 à 19:16, par toupiné59 En réponse à : Rotation continue avec un servomoteur
En réponse à : Rotation continue avec un servomoteur
Petite question J’ai démonté un servomoteur Sawa SM-631 mais la tête du rétentiomètre n’est pas sur la partie électronique ? il y a 3 fils soudés. ou est il ? sa forme n’est pas la même il se coupe où ?
# Le 8 octobre 2017 à 01:11, par Eric P. En réponse à : Rotation continue avec un servomoteur
En réponse à : Rotation continue avec un servomoteur
Bonjour (pour commencer, c’est mieux et plus poli 😉 )
Le potentiomètre (je suppose que c’est ce que vous vouliez écrire à la place de rétentiomètre 😄 est dans l’axe du pignon de sortie du servo. Votre photo ne permet pas de le voir, car un peu floue et pas prise avec le bon axe.
Quant au fait que la forme soit différente, c’est normal, chaque fabricant utilisant des modèles qui lui sont propres.
Comme indiqué dans l’article, la partie à couper est l’axe qui le relier mécaniquement au pignon de sortie.
Répondre à ce message
# Le 16 mai 2013 à 18:47, par Kryaak En réponse à : Rotation continue avec un servomoteur
En réponse à : Rotation continue avec un servomoteur
1 fraisé la tête de l’engrenage pour que le potentiomètre tourne ds le vide à l’intérieur.
2 insérer une visse ( micro visse) ds la tête du potentiomètre,
3 percer le fond de l’engrenage diamètre 1.2 mm 1.6 mm (la ou se place la visse de fixation)
4 collé la croix du cerveau sur l’engrenage au lieu de le visser ( cela laisse apparaitre au fond du pas de visse le trou 1.2 /1.6mm .
5 vous avez mntn la possibilité avec un tournevis de précision d’accéder au potentiomètre ou des réglage de vitesse ou autre ;)
6 Merci à l’article de Julien-H qui m’en a donner l’idée car ds mon cas il fallait pouvoir ajuster la vitesse de rotation du cerveau ou sont neutre facilement.
Répondre à ce message