 PoBot
PoBot
 Electronique du robot bipède
Electronique du robot bipèdePlusieurs cartes électroniques sont utilisées. Il faut que ça reste compact mais que ce soit pratique pour un débutant, et ne nécessitant pas de réaliser une carte spécifique pour que n’importe qui puisse refaire le robot chez lui. Nous avons donc utilisé des éléments de la famille Arduino.

La carte programmable
C’est une Arduino standard (Diecimilla ou Duemilanove). Directement programmable et alimentable par USB, cela évite d’avoir deux câbles : plus il y a de fils moins les mouvements seront libres.
Très répandue depuis 2 ans chez les hobbyistes, on commence à bien la connaitre.
Le brassage des connexions
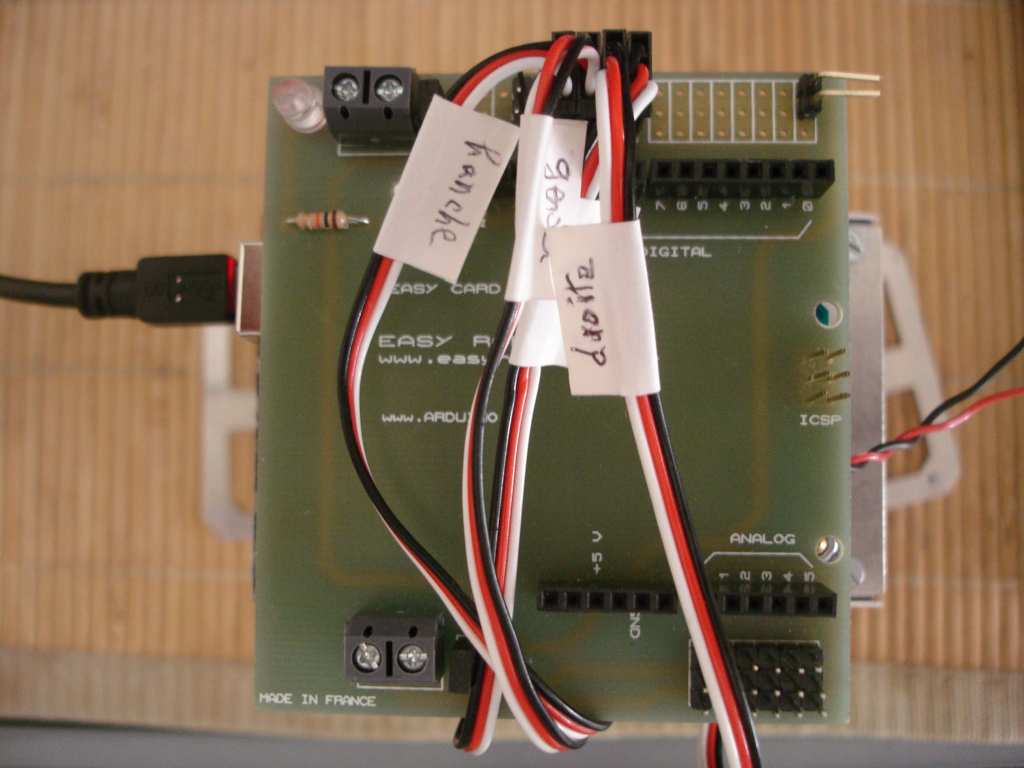
Pour connecter les servomoteurs, les capteurs et l’alimentation, ce robot dispose d’une carte très pratique : "Easy Card" qui prend la forme d’une extension "shield" pour Arduino qui permet d’avoir à disposition toutes les entrées/sorties par des connecteurs 3 points au même brochage que les servomoteurs : tension au centre, signal et masse à l’extérieur.
Il y a également des borniers à vis pour séparer l’alimentation des servomoteurs. Nous n’allons pas l’utiliser pour le moment, en considérant que les 5 volts partagés avec la partie logique sont suffisants.

Contactez Easyrobotics pour en obtenir une.
Table de connexion des servomoteurs
| N° | Articulation | Sortie Arduino |
| 0 | Genou gauche | 8 |
| 1 | Hanche gauche | 11 |
| 2 | Genou droit | 10 |
| 3 | Hanche droite | 9 |
Le numéro dans la première colonne correspondra au numéro dans le code Arduino (voir articles connexes).
Pensez à étiquetez vos câbles, c’est tellement plus pratique :
L’alimentation
Pour rendre autonome le robot, on a utilisé une batterie Lithium Polymère spécialement taillée pour Arduino puisqu’elle se présente sous la forme d’une carte rigide reprenant le format Diecimilla et comportant une électronique de contrôle, de boost de tension pour obtenir les 5 volts nominaux et même un connecteur USB pour se recharger.
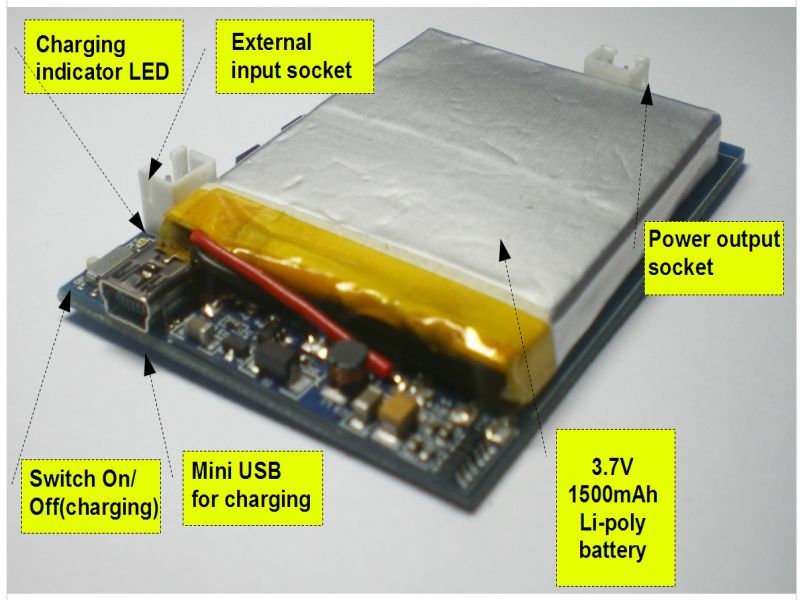
Cette carte est disponible chez NuElectronics. Merci à eux pour le matériel offert.




