 PoBot
PoBot
 Le treuil (prototype)
Le treuil (prototype)On va changer un peu de sujet (tout en restant dans le projet du radeau quand même) et s’intéresser à un des dispositif embarqués : le treuil
J’entends déjà la rumeur s’enfler : "Ouah, l’ôt, y va nous faire un fromage d’un bête moulinet de canne à pêche"
Et bien non, car il ne s’agit pas là d’un simple treuil pour cordage, mais d’un treuil pour câble électrique.
Le problème
C’est tout simplement qu’un câble électrique, c’est connecté quelque part au deux bouts. Côté extrémité libre pas de problème, mais côté treuil ? Si vous avez déjà regardé de près un enrouleur de tuyau d’arrosage (oui, je sais, ce n’est pas particulièrement passionnant à priori), vous avez dû remarquer qu’au niveau du moyeu du tambour il y a toujours (en tout cas sur les modèles pas trop simplistes) un système de joint tournant qui permet au bout de tuyau qui relie l’enrouleur au robinet de ne pas se vriller sur lui-même lorsqu’on fait tourner le tambour.
Nous avons ici exactement le même problème, mais pour du câble électrique, avec les complications supplémentaires suivantes :
– le câble peut contenir un nombre variable de conducteurs en fonction de ce qui est au bout
– il peut être blindé (cas d’une caméra immergée)
– tout cela ne doit pas introduire de parasite
– et résister à l’eau
Il existe bien des systèmes de connexions électriques tournantes, comme par exemple ces petits accessoires qui s’intercalent sur le fil du combiné du téléphone pour lui éviter de se tortiller au fil du temps. Le seul souci, est qu’il y a un nombre de contacts limités, que ce n’est pas fait pour tourner en permanence et que ce n’est pas prévu pour résister à l’eau. Conclusion, la solution n’est pas intéressante.
Si le câble ne se vrillait pas...
Et bien le problème n’existerait pas. Et d’abord, pourquoi il se vrille ? Parce que la rotation du tambour fait tourner l’extrémité libre sur elle-même. Si vous avez d’ailleurs déjà lové une corde ou un câble électrique, vous savez qu’il faut la faire tourner sur elle-même à chaque enroulement.
Donc pour ne pas vriller le câble, il suffit de ne pas l’enrouler sur lui-même.
La solution
Je n’en pas inventé le principe, mais l’ai juste emprunté aux palans à chaîne. En effet, enrouler une chaîne sur un tambour se fait rarement, à cause de l’encombrement des maillons et du fait que les spires consécutives ne se mettent pas en place aussi facilement que pour un cordage cylindrique. De plus, il y a de forts risques de coincements entre deux couches d’enroulements.
Ce qui est fait alors est qu’une roue crantée (pour entraîner la chaîne) "avale" celle-ci, et la recrache en vrac de l’autre côté dans un sac de stockage, comme on le voit sur la photo ci-dessous :

Comme nous manipulons un câble, la roue crantée d’entraînement va être remplacée par un galet avec un bandage caoutchouc offrant suffisamment de friction avec le matériau de la gaine du câble, complété par des galets de pression.
Pas facile à trouver me direz-vous... Et bien si, car voici quelques pistes pour ces divers galets :
– roues de voitures radio-commandées (pneus en caoutchouc et non en mousse, car trop fragile à l’abrasion)
– galets d’entraînement du papier, récupérés sur des imprimantes ou photocopieurs (encore une fois, les poubelles d’objets technologiques sont des mines d’or pour le bricoleur)
– au pire, tube de PVC à l’extérieur duquel on colle un morceau de chambre à air (utiliser de la colle néoprène)
Si on n’a pas de poubelle à proximité, la dernière solution est la plus économique, mais requiert la fabrication des flasques pour obtenir un galet complet. Elle est donc plus complexe à réaliser.
Vérification expérimentale du principe
Avant de se lancer dans la fabrication, il est toujours préférable de réaliser rapidement une maquette fonctionnelle pour s’assurer qu’on n’a pas omis de détail gênant, ou pêché par excès d’optimisme.
Pour ce type de tâche, les LEGO sont imbattables. Non, je n’ai aucune action chez eux, mais juste un certain nombre de boites accumulées de depuis mon jeune âge.... et complétées depuis aussi 🙂
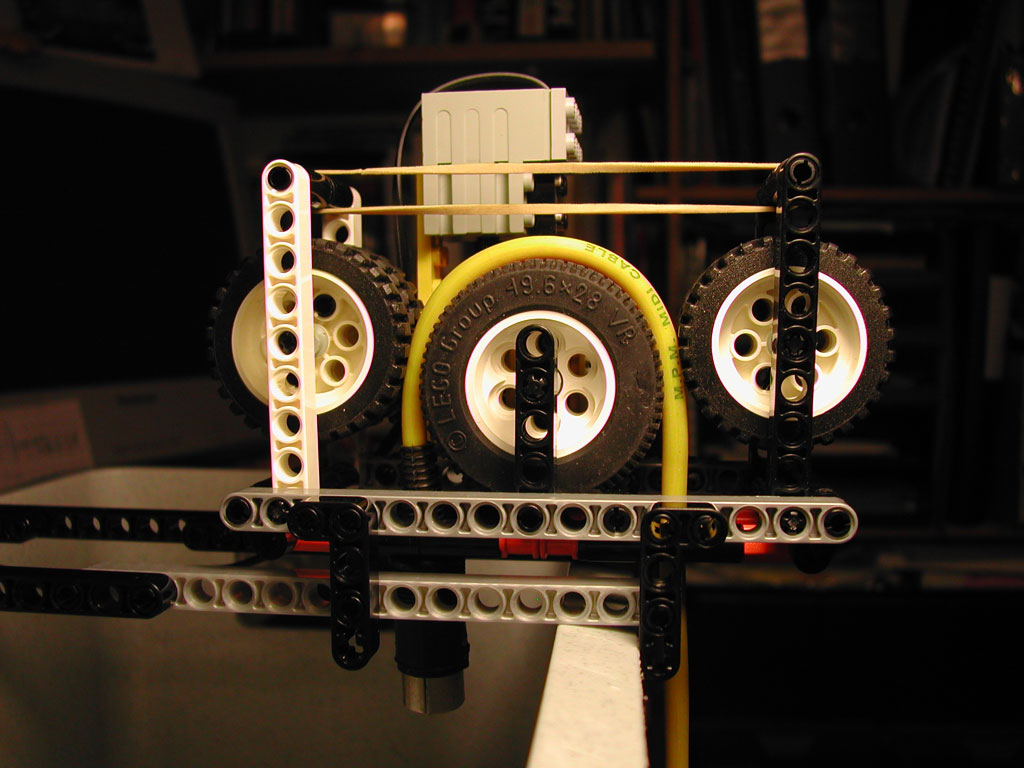
Une petite demi-heure plus tard, voici le résultat. Tout d’abord, une vue latérale qui montre le galet d’entraînement au centre, et les deux galets de pression, plaqués par un simple élastique (au-dessus). On voit bien le cheminement du câble, qui est pour les essais un câble MIDI muti-conducteurs de 5 mètres de long, assez similaire donc à ce qu’on va utiliser dans la réalité.
Sur la photo suivante, on peut distinguer la transmission du galet d’entraînement. Elle n’a rien d’imposé, car elle dépend du type de moteur que vous allez récupérer (ou acheter) pour cela.
A noter qu’une solution très intéressante pour la motorisation est de modifier un servo de radio-modélisme afin de le transformer en moto-réducteur. Avantages :
– compact
– fort couple
– vitesse lente
– facilité de commande, via une des sorties du récepteur de RC
Il y a une foule de pages Web qui vous expliquent comment le faire, comme celle-ci. On trouve même des servos déjà modifiés (ex : chez Robopolis), car cette solution est très souvent utilisée pour la propulsion de petits robots. Pour faire plus économique que de modifier un servo en état de marche, il est possible de récupérer un exemplaire dont l’électronique de commande à grillé (c’est l’accident de servo le plus courant car le moteur lui-même est en général plus robuste, l’autre cause de mortalité des servos étant la rupture des pignons due à une trop forte charge). Dans ce cas, vous ne conservez que le moteur que vous alimentez directement via un relais ou tout autre dispositif de commande.
Voici enfin, le tout en fonctionnement. On voit le câble qui vient se stocker dans son container, ici une boite de rangement en plastique.

Si vous avez une connexion Internet rapide, une petite vidéo (environ 6M) de la bête en fonctionnement.
Quelques recommandations
Ce qui est fondamental pour le bon fonctionnement du tout est le guidage du câble à l’entrée et à la sortie du système. Sur les photos, on peut voir qu’il est constitué des pièces cylindriques noires, encadrées par les petites pièces oranges, disposées sous les galets, entre les longerons de la structure de base.

Un autre point important est également la taille du container pour le câble. Celui-ci étant plus rigide qu’une chaîne (dont les maillons peuvent faire presque n’importe quel angle entre eux), il faut s’assurer qu’il pourra former des boucles assez large. La distance entre le treuil et le fond du bac doit être aussi importante que possible. De même, ses dimensions latérales (longueur et largeur) doivent faire en sorte qu’elles ne contraignent pas la formation des boucles. Le plus simple est de faire un essai du treuil en le disposant au-dessus d’une table, à la bonne distance, et de mesurer en fin d’essai l’étendue occupée par l’enroulement sur la table. On peut réduire éventuellement un peu si on a besoin de récupérer de la place, mais dans notre cas, nous avons largement la place pour le type de bac utilisé.
Et pour finir
C’est maintenant que tout commence, car il va falloir fabriquer tout cela. Autant c’est ultra simple et rapide en LEGO, autant en ferraille et autres ingrédients de base, c’est moins immédiat. Mais, bon, on a l’habitude...





Vos commentaires
# Le 6 décembre 2023 à 10:36, par Chatra En réponse à : Le treuil (prototype)
En réponse à : Le treuil (prototype)
Bonjour,
Serais t’il possible d’obtenir les plans de construction dans le but de réaliser un treuil en tp de science de l’ingénieur.
Vous serez bien sûr crédité lors du compte rendu
Cordialement Eddi Chatra élève en ingénierie à l’Ecam
# Le 6 décembre 2023 à 11:14, par Eric P. En réponse à : Le treuil (prototype)
En réponse à : Le treuil (prototype)
Bonjour,
Je n’ai fait aucun plan de ce dispositif, la construction ayant été faite avec les "moyens du bord", c’est à dire en essayant d’exploiter les fournitures que j’avais en stock, récupérées pour la plupart du démontage d’appareils divers et variés.
Ceci étant, le mécanisme est suffisamment simple pour pouvoir en réaliser un plan vous-même, basé sur les fournitures dont vous disposez.
Cordialement.
Répondre à ce message