 PoBot
PoBot
 Capteur de proximité IR
Capteur de proximité IRCe module est une carte toute faite (chouette) de détection à infrarouge d’obstacles à courte distance (10cm, voire nos tests).
Un oscillateur à 40 kHz permet de moduler le signal émis et ainsi améliorer la détection : le récepteur n’est sensible qu’au signal modulé, et sera moins perturbé par d’autres sources naturelles ou artificielles d’infra-rouge.
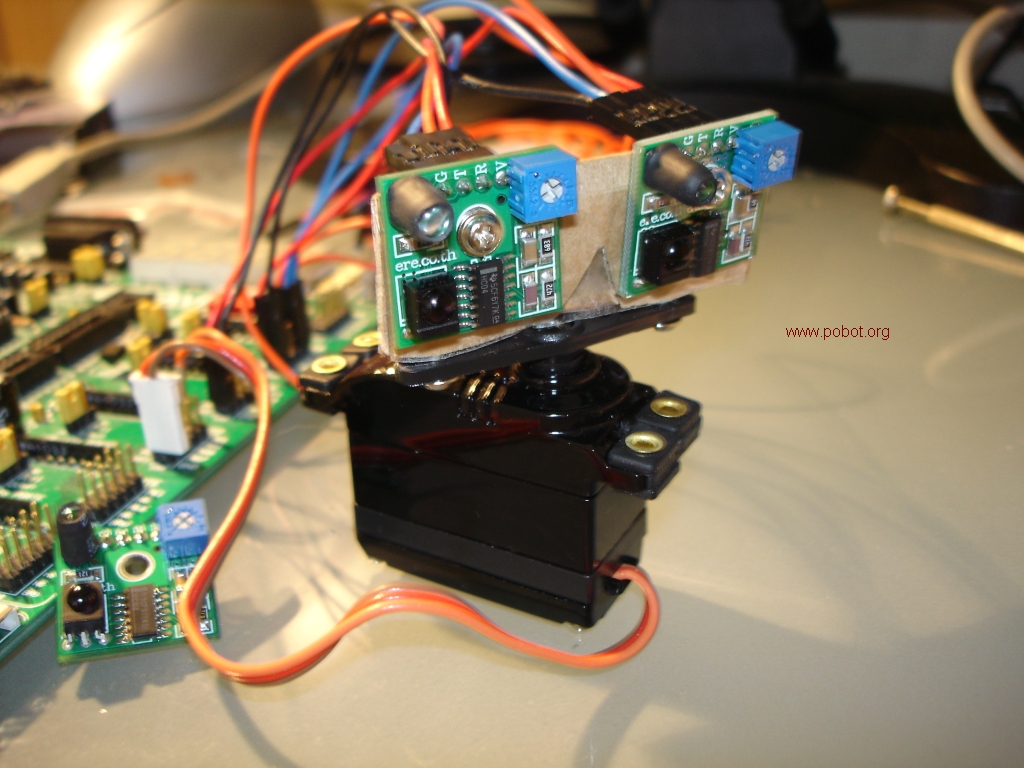
On peut utiliser plusieurs proximètres côte à côte sans craindre d’interférences. Une tête stéréo peut ainsi être facilement être réalisée pour quelques euros.
On trouve également des montages électroniques amateurs permettant de rentrer dans les détails du circuit : http://d.nardi.free.fr/ProxIR.htm par exemple.
Mise à jour de 2011 : l’équipe thaïlandaise qui a créé ce capteur a déménagé son serveur de ere.co.th à ereshop.com
Datasheet
Document détaillé (en anglais) :

D’autres descriptions techniques (datasheets) de capteurs optiques sont disponibles dans la rubrique "Détecteurs et capteurs optiques"
Connexion
Quatre pattes :
| G | masse commune avec le µC |
| T | émission : haut pour émettre |
| R | réception : bas si obstacle |
| V | tension d’entrée 5v |
Attention, les appelations Rx et Tx n’ont rien à voir avec une liaison série. Il s’agit juste d’aide mémoire pour retrouver leur utilisation.
Notez bien le niveau bas du signal de réception en cas d’obstacle.
Premiers pas
Pour tester ce module, il suffit de connecter les pattes G (0V), T (5V) et V (5V) à l’alimentation, et la patte R à une led. Comme on dispose d’un kit EasyAVR, il n’y a aucun programme à faire, on peut tout de suite constater le bon fonctionnement.

Ce module remplit son objectif : détection d’obstacle à courte distance. Dans mes conditions de test (un bureau avec un éclairage simple), je n’obtiens pas les 10 cm mais ce n’est pas plus mal.
L’utilisation qu’on va pouvoir faire de ce genre de petit module est limité à de la détection d’obstacle rapprochée : éviter une collision, faire un suivi de mur, ...
Et après ?
Ma première utilisation de ce capteur ultrasimple est de faire un premier tracking d’objet : deux capteurs sont fixés sur un servomoteur qui se centre sur l’objet suivi. Cela permet de se concentrer sur l’algorithme de suivi et de ne pas s’embêter en plus avec des capteurs complexes comme des "Sharp" GP2D12. Cela viendra plus tard.




