 PoBot
PoBot
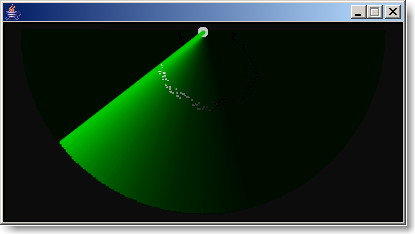
 Visualisation radar d’une détection de distance
Visualisation radar d’une détection de distanceLe radar suivant est réalisé avec Processing. ll reprend le principe de l’oscilloscope minimal : notre capteur (carte
électronique) envoie la valeur lue par liaison série jusqu’à l’ordinateur qui transforme la valeur pour la représenter
dans un radar (demi-cercle).
On pourra ainsi représenter la détection de l’environnement ambiant avec un capteur de distance Sharp ou ultrason
sur un servomoteur en rotation permanente.
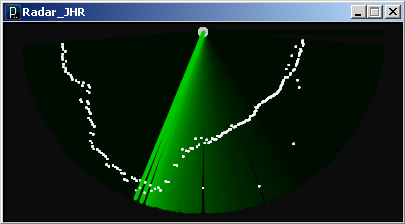
Le résultat
L’accès au port série a été désactivé pour montrer le visuel. Ci-dessous une copie de l’application réelle, avec affichage des valeurs reçues du capteur.
Le code
Application graphique

Application d’acquisition matérielle
En utilisant un capteur Sharp GP2D120, on reçoit une valeur entre 0 et 1024 (précision de 10 bits) sur une entrée analogique, qui est envoyée via la liaison série.
Les informations envoyées sont :
– l’angle du servo au moment de l’acquisition du signal (2 octets)
– le sens de rotation du servo (1 octet)
– la valeur du capteur (2 octets)
Ces valeurs sont reçues dans notre application (télécharger la mise à jour de l’applet graphique) et vont piloter le balayage "radar" pour indiquer la position du servo.
Les valeurs reçues sont stockées dans un tableau pour chacun des angles, permettant ensuite de faire un traitement plus complexe. Par exemple chercher la valeur minimale dans toutes les valeurs pour se diriger vers l’obstacle, ou au contraire trouver le chemin libre.
Utilisations
On peut utiliser ce code sur un robot mobile pour avoir une vue des obstacles. L’équipe du CERAM Bachelors (Skema) l’a utilisé sur le robot de la Coupe de France 2009.
A suivre également, les modifications de ZegL : http://www.robotix.fr/forum/sujet-4... et le résultat de l’Ecole Centrale d’Electronique.





Vos commentaires
# Le 6 octobre 2008 à 16:21, par ? En réponse à : Visualisation radar d’une détection de distance
En réponse à : Visualisation radar d’une détection de distance
Bonjour , j’ai vu que lextronic diffuse les platines Arduino laquelle me conseillez vous ?
# Le 7 octobre 2008 à 10:00, par Julien H. En réponse à : Visualisation radar d’une détection de distance
En réponse à : Visualisation radar d’une détection de distance
La version Arduino Diecimilla, la plus pratique (USB, connecteurs pour insérer des fils, compatible avec des "shields" qui se clipsent dessus et rajoutent des fonctionnalités : commande de moteurs, platine d’essai, communication XBee série sans fil, etc.)
# Le 11 octobre 2008 à 08:18, par ? En réponse à : Visualisation radar d’une détection de distance
En réponse à : Visualisation radar d’une détection de distance
Bonjour , je ne vois pas chez lextronic la version arduino diecimilla , quelle autre prendre
# Le 11 octobre 2008 à 09:21, par Julien H. En réponse à : Visualisation radar d’une détection de distance
En réponse à : Visualisation radar d’une détection de distance
C’est la version "USB board". Ils l’ont renommée mais sur les photos ont voit bien que c’est l’Arduino Diecimilla :)
http://lextronic.fr/P4133-platine-arduino-usb-board.html
Je conseille de prendre tout de suite le "protoshield" avec une mini plaque de développement sans soudure (solderless breadboard).
Lextronic le propose ici : http://lextronic.fr/P4130-kit-arduino-protoshield.html mais je ne vois pas la mini plaque d’essai, à chercher.
Répondre à ce message