 PoBot
PoBot
 Muscles pneumatiques
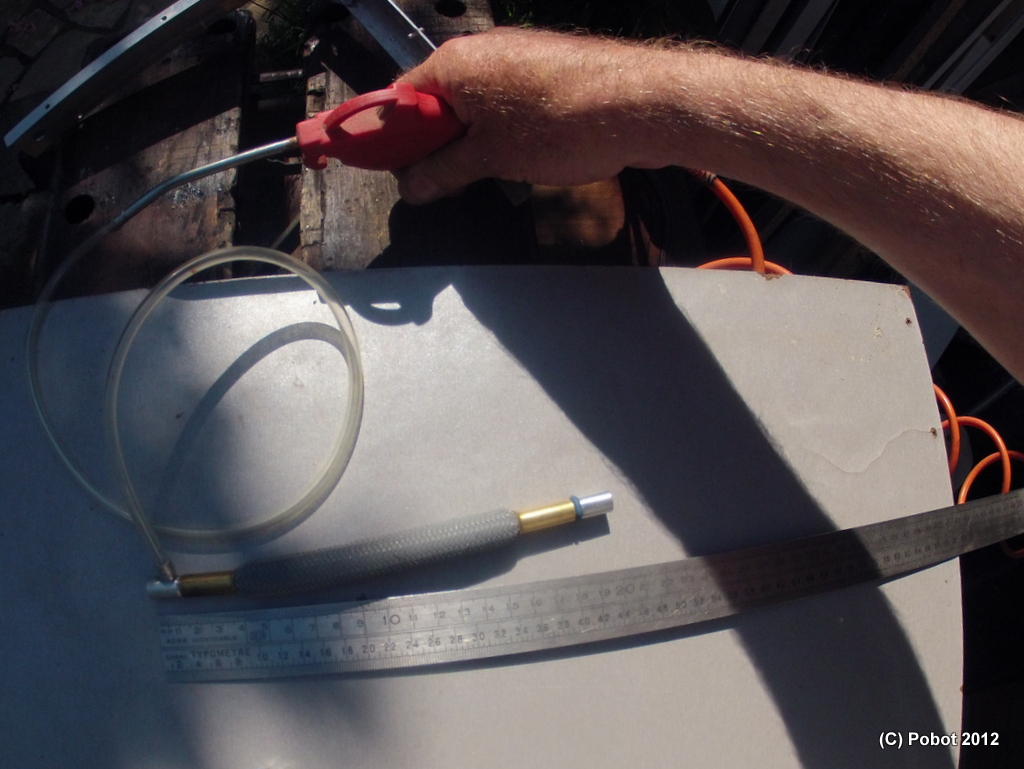
Muscles pneumatiquesUn montage simple et impressionnant consiste à enfermer un ballon de baudruche dans une gaine tressée et à souffler dedans avec de l’air sous pression. On obtient un mouvement linéaire que notre imagination nous permet d’appeler contraction musculaire.
Le fonctionnement est simple et repose sur la structure tressée du tube de plastique extérieur : quand son diamètre augmente, sa longueur diminue, car chacun des fils qui compose la tresse doit suivre le périmètre de la section.
Il suffit donc de gonfler le ballon de baudruche pour qu’il occupe le plus de place et fasse rétrécir le muscle pneumatique. La pression maximise le volume interne de la gaine, jusqu’à ce que la tresse soit raccourcie à son maximum de capacité.
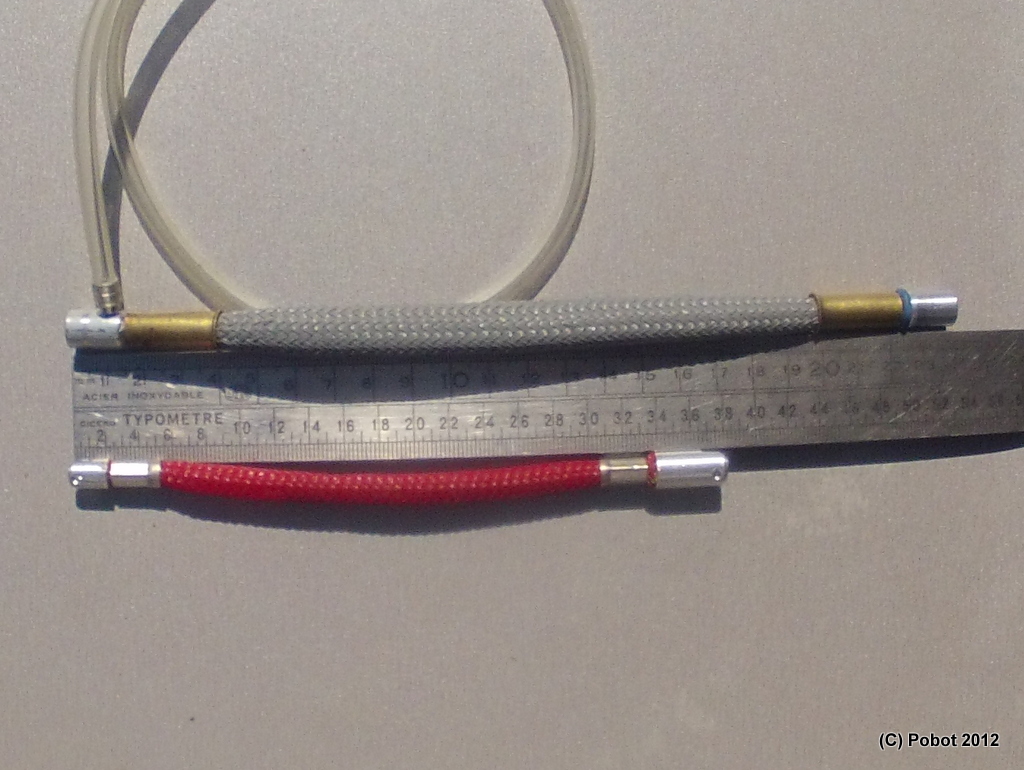
Nous avons obtenu un raccourcissement maximum du tiers de la longueur : passer de 24 centimètres à 16 centimètres. Les quatre autres modèles que nous avons construit avaient un raccourcissement similaire.
Fabrication
Les matériaux principaux ont été cités :
– la gaine tressée, à récupérer dans les ordinateurs, dans les machines industrielles
– le ballon de baudruche, ou toute autre matière extensible.
Il faut ajouter des embouts pour tenir la gaine et le ballon à leurs extrémités, et pour au moins un côté, qui permet de remplir le ballon avec un embout pour air comprimé.
A notre connaissance ces pièces n’existent pas dans le commerce ou en récupération. Il faut donc les faire, avec des outils permettant d’avoir une bonne fiabilité dans la résistance à la pression.
Faites bien attention si vous tentez l’expérience. Demandez l’aide de personnes expérimentées et portez des équipements de sécurité.
Utilisation
Au-delà de notre curiosité et notre goût pour la fabrication de pièces uniques, on peut se pencher sur les qualités d’un muscle pneumatique :
– le poids : ce montage est très léger
– la force : grâce au pneumatique, plusieurs kilogrammes sont soulevés
– la tenue dans le temps : si le ballon est bien dimensionné, pas d’usure mécanique
– la résistance à l’eau : le plastique c’est fantastique
Mais il y a des inconvénients, bien qu’il ne faille pas comparer l’usage de ces muscles à celui d’un actionneur linéaire classique :
– un seul sens : on raccourcit mais on ne peut pas allonger
– pneumatique : beaucoup moins courant sur un robot mobile que l’électricité
Il y a donc au final un usage adéquat qui saute aux yeux : les robots parallèles, notamment humanoïdes. En effet, comme dans le corps humain, c’est la conjonction de plusieurs muscles pneumatiques qui permet d’avoir un contrôle multidirectionnel sur les articulations.




