 PoBot
PoBot
 Fabrication du squelette de R2-D2
Fabrication du squelette de R2-D2Comme vous avez pu le découvrir dans la partie "mise en plans", nous avons retenu le squelette ou frame de Mike Senna sur des plans de Matthew Henrick, bien connus du R2 D2 Builders Club dont nous faisons désormais partie.
Nous avons repris ces plans en pouces et les avons adapté aux mesures métriques et surtout aux épaisseurs que nous avons choisie. C’est le sujet d’un autre article sur la mise en plans du squelette.
Découpe des pièces
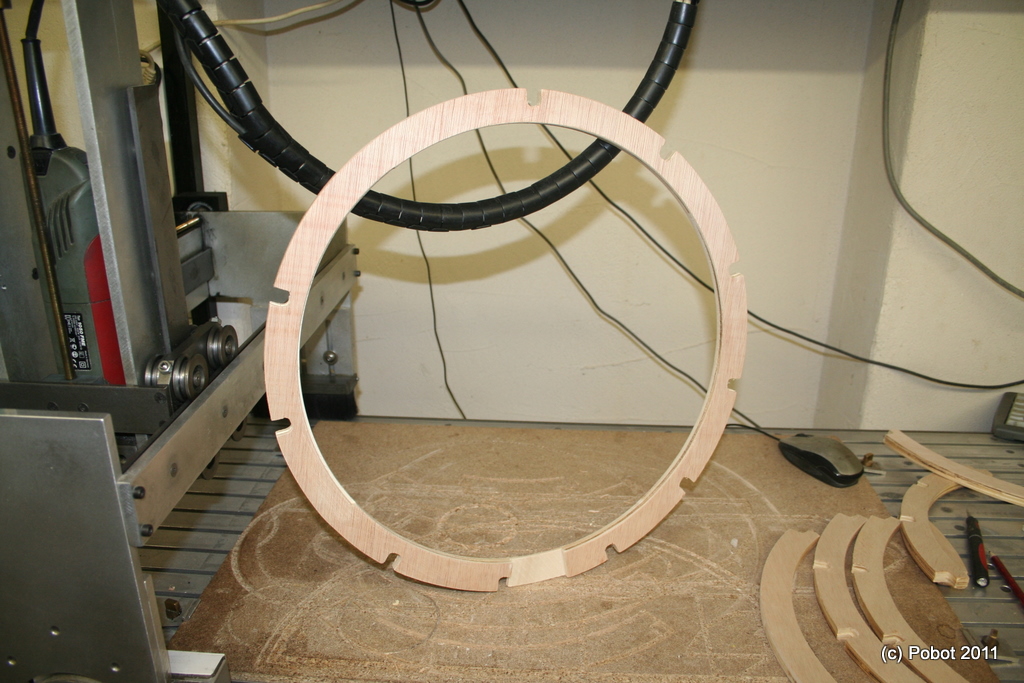
Ce squelette est réalisé en bois, contrairement aux autres pièces du robot. Le choix du bois tient surtout à sa légèreté et à sa faciliter de travail. Jean-Pierre a sélectionné du contreplaqué de bonne qualité, en deux épaisseurs : 22 mm et 12 mm.

Si vous êtes attentif, vous aurez remarqué sur la photo ci-dessus qu’une partie du plateau semble déjà découpée selon le cercle extérieur. Vous vous demandez pourquoi ? Envoyez-nous votre suggestion et vous gagnerez une photo dédicacée.
Le bois se travaille très bien à la machine CNC avec une fraise de 6 mm et des passes de 6 mm. La découpe ne laisse pas de traces de brûlure noire.
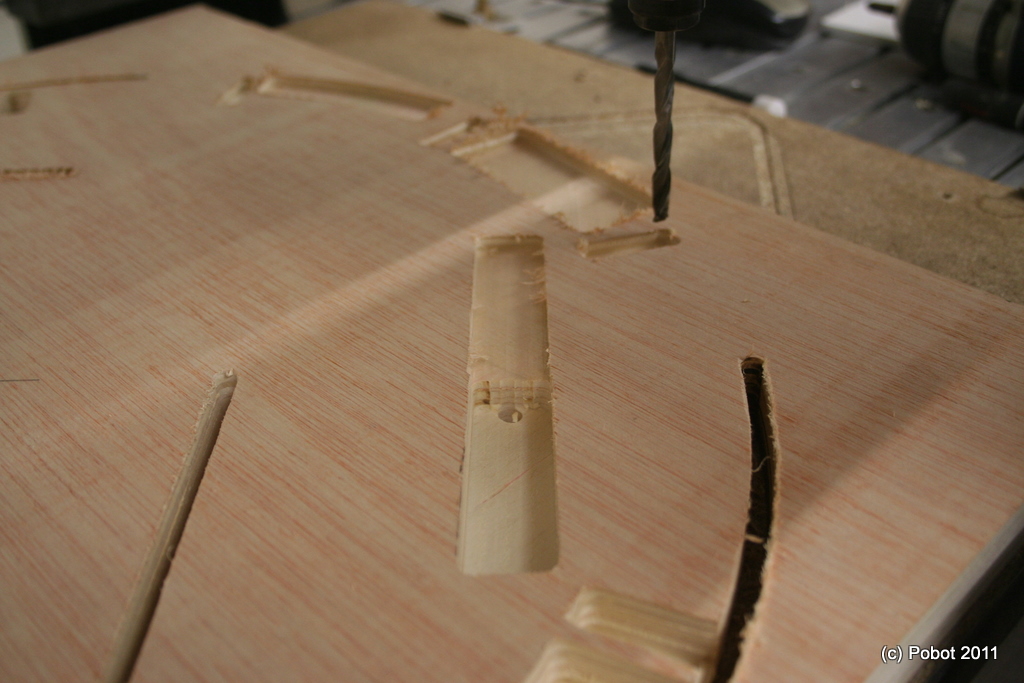
Ajustement
Une fois chacune des pièces extraite de la fraiseuse, il faut poncer légèrement les côtés pour faire disparaitre les barbures de bois, notamment sur les couches internes du contreplaqué qui n’ont pas la même dureté ni le même fil (le sens dans lequel le bois se coupe le mieux).

Il ne s’agit pas de finition mais d’ajustement. D’ailleurs ce ponçage est plus intensif, et on passe à la lime électrique pour les encoches. Comme a dit un grand sage, "tant que la lime à épaissir n’existe pas, il vaut mieux devoir en enlever qu’en rajouter". C’est pourquoi les plans sont dessinés aux dimensions exactes, et on lime les encoches en présentant régulièrement les pièces à emboiter jusqu’à ce qu’elles coïncident parfaitement.
On retrouve cet ajustement sur les deux plateaux : les plans sont conçus en symétrie, vu de l’intérieur du robot. Lorsqu’on a terminé les deux pièces, on retourne le plateau supérieur et on l’aligne avec le plateau inférieur. Si vous avez des encoches de montant qui ne tombent pas en face, commencez par limer le bord des encoches : ne comptez pas trop sur la flexion du bois, vous obtiendriez un résultat médiocre sans angles droits.

Ce travail est minutieux et nécessite de l’ordre : quand deux pièces sont identiques ou qu’une seule pièce présente une symétrie, il faut absolument noter quelle fente s’emboite avec quelle autre car l’ajustement est spécifique, comme c’est le cas pour les pièces du devant de R2-D2 :

Comme quoi même avec une machine à commande numérique il faut du savoir-faire manuel.
Assemblage
On monte une première fois le squelette pour voir si ça ressemble au modèle. Ouf, c’est bien ça !
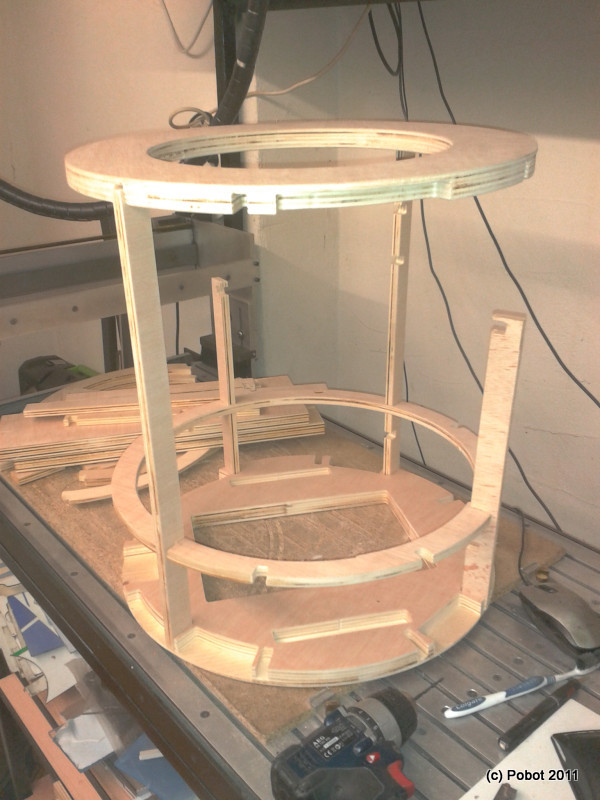
Seulement deux pièces étaient mal dessinées : les "side wings" avaient été bien faites la première fois pour une épaisseur de 10 mm, mais en refaisant les versions sur 12 mm j’ai repris le dessin d’un plateau donc des encoches de 30 mm au lieu de 15... à refaire !
Les montants de fixation des bras sont très particuliers : pour pouvoir refermer le plateau supérieur, l’ajustement doit être très précis, et très régulier car il faudra pouvoir faire coulisser le montant pour lui donner un centrage précis. Heureusement, Matthew Henricks a prévu des points de centrage dans ses dessins, ce qui nous permettra de venir "voir" par en-dessous si la pièce est à sa place, puis de faire rentrer un tourillon de 8 mm bien encollé pour fixer la pièce définitivement.
Collage
On utilise une colle à bois pour utilisation extérieure, ce qui permettra de résister à l’eau si jamais notre robot se retrouve dans un marais de Dagoba.







Vos commentaires
# Le 28 juin 2023 à 19:11, par pereira En réponse à : Fabrication du squelette de R2-D2
En réponse à : Fabrication du squelette de R2-D2
bonjour,
pouvez vous me fournir le plan de ce r2d2 ?
je voudrai me lancer dans l aventure ...
en vous remerciant
# Le 26 octobre 2023 à 23:16, par Eric P. En réponse à : Fabrication du squelette de R2-D2
En réponse à : Fabrication du squelette de R2-D2
Malheureusement, le constructeur du robot ne fait plus partie de l’association et a quitté la région. Le projet n’a jamais été terminé.
Répondre à ce message
# Le 24 août 2016 à 19:58, par BASSET Arnaud En réponse à : Fabrication du squelette de R2-D2
En réponse à : Fabrication du squelette de R2-D2
Bonjour,
je viens de voir votre travail et je suis curieux de savoir comment vous avez réalisé votre CNC pour découper le bois.
L’avez-vous acheté ou fabriqué ?
Si vous l’avez fabriqué, avez vous des références à me donner afin d’en réaliser une.
Je suis fabricant d’accessoire sculptés en bois et la découpe par CN me permettrait de gagner un temps précieux et d’avoir une qualité de découpe bien meilleure qu’avec ma scie sauteuse.
Merci d’avance.
Arnaud
# Le 16 octobre 2016 à 16:56, par Eric P. En réponse à : Fabrication du squelette de R2-D2
En réponse à : Fabrication du squelette de R2-D2
Le propriétaire de la machine l’a effectivement réalisée lui-même. Il ne vient malheureusement plus au club, ayant changé de région.
Concernant les références, il a utilisé beaucoup de fournitures qu’on trouve en grande surface de bricolage (tiges filetées pour les vis de translation des axes, profilés acier,...). La broche est une Kress (mais je ne sais pas quel modèle), quand aux moteurs pas à pas, ce sont des pièces de récupération provenant du démontage de gros appareils de photocopie sauf erreur).
Ceci étant, si votre spécialité n’est ni l’électronique, ni la mécanique, ni l’informatique, je vous conseille de vous orienter plutôt vers l’achat d’une machine toute faite. On trouve pas mal d’occasions intéressantes, et la lecture de forums comme http://www.usinages.com/forums/ vous apportera une aide précieuse, voire des contacts avec des personnes proposant des machines d’occasion.
Répondre à ce message