 PoBot
PoBot
 Système 2-3-2 de R2-D2
Système 2-3-2 de R2-D2Le célèbre droïde peut se déplacer sur 2 pattes ou sur 3 pattes. Il faut donc un mécanisme de rotation des jambes autour du corps et des chevilles à l’intérieur des pieds pour passer de la position verticale (2 pattes) à la position oblique (3 pattes). Il faut aussi que le pied du milieu soit escamotable.
Ces opérations sont bien plus impressionnantes lorsqu’elles sont motorisées, bien que cela nécessite plus de pièces et plus de préparation qu’une modification manuelle. Et c’est même obligatoire quand on veut faire un robot R2-D2 totalement autonome.
On appelle cela le système 2-3-2 et sa conception est une des étapes fondamentales, compte-tenu de la place que la mécanique va prendre.
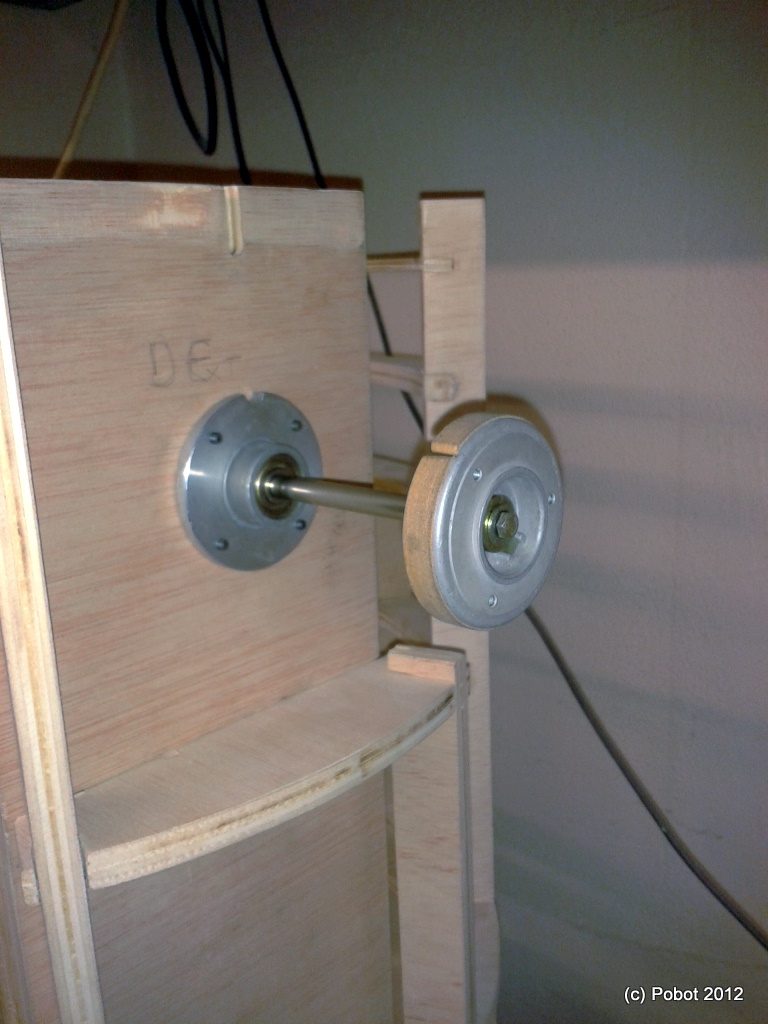
Les fixations
Rappel : les jambes sont fixées au corps par des axes de magnétophone (gros modèle...) avec deux roulements à bille et un axe de 8 mm.


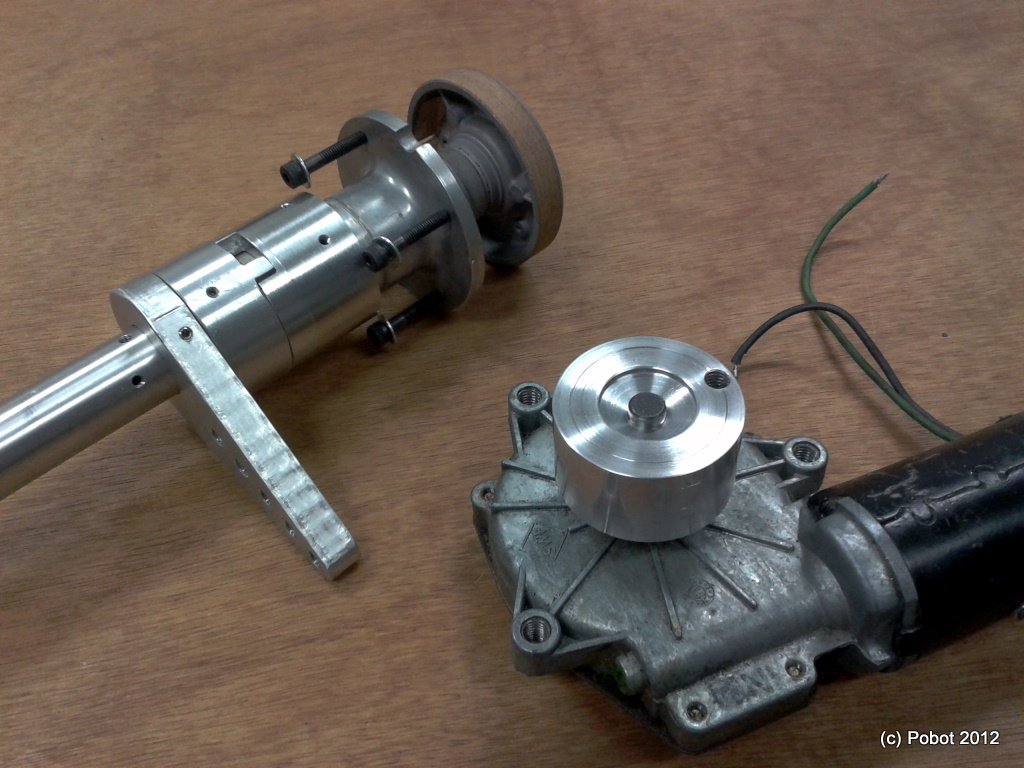
Les pièces
L’axe usiné, le bras de levier et le moteur.

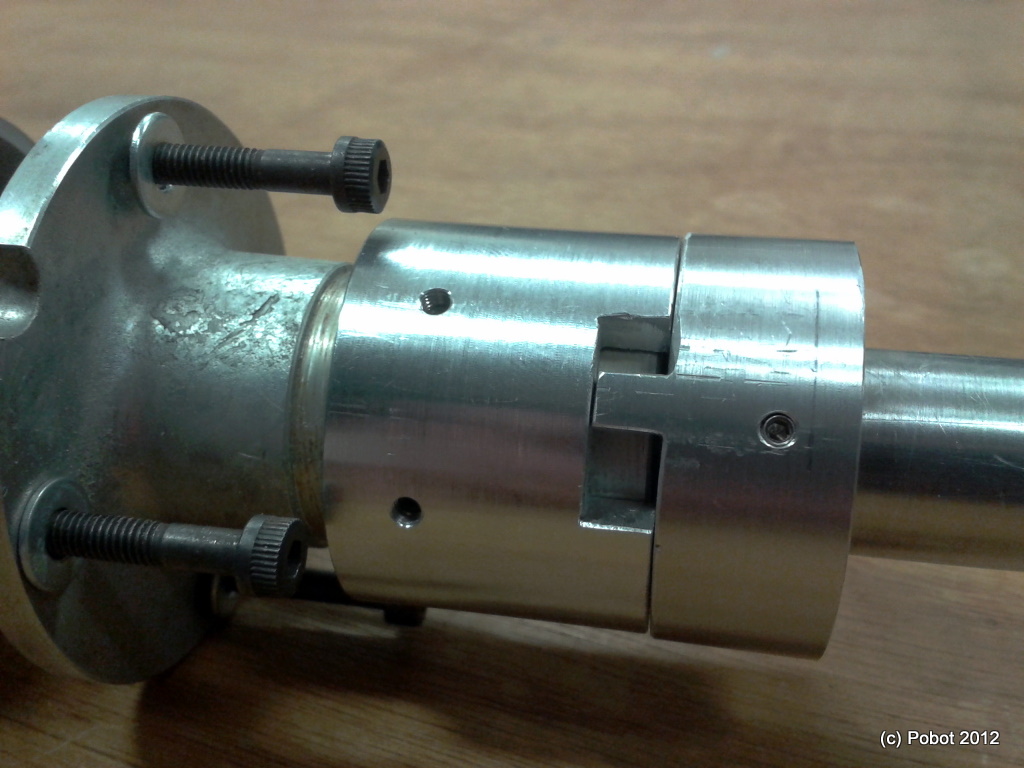
Zoom sur le moteur, sa pièce tournée et le bras de levier
Une encoche permet de passer d’une position à l’autre.

Astuce
Une bielle entre le moteur et le bras de levier fera que l’axe passera d’une position à l’autre quand le moteur sera en rotation continue, sans jamais entrer en butée. C’est le génie de cette conception, qui permet de ne pas risquer de casse si jamais le logiciel ou l’électronique de fins de course rencontre un problème... ce qui peut arriver sur un robot aussi complexe.
Résultat






Vos commentaires
# Le 19 janvier 2016 à 16:47, par Ralf En réponse à : Système 2-3-2 de R2-D2
En réponse à : Système 2-3-2 de R2-D2
Bonjour,
J’aimerais savoir, svp, comment avez-vous fait pour fixer les bras ?
# Le 25 janvier 2016 à 21:17, par Julien H. En réponse à : Système 2-3-2 de R2-D2
En réponse à : Système 2-3-2 de R2-D2
La fixation n’est pas encore réalisée, on recherche des personnes motivées pour s’y atteler !
Répondre à ce message