 PoBot
PoBot
 Alimentation de la Raspberry Pi
Alimentation de la Raspberry Pi__1__
EDIT 30/12/2016
Attention, la RPi 3 semble beaucoup plus tatillonne concernant son alimentation 5V, et les solutions présentées ici ne seront peut-être pas totalement fiables pour elle, même si elles fonctionnent parfaitement pour les modèles précédents. Pour plus de détails, se reporter à cet article.
__1__
La carte RPi utilise beaucoup d’énergie pour son microprocesseur ARM, et pour sa puce vidéo HDMI ainsi que pour l’Ethernet. L’alimentation demandée est de 5 volts continus et 700 mA minimum, ce qui ne pose pas de problème pour une alimentation secteur.
Au passage, et contrairement à ce que disent certains sites à tord, il ne faut pas alimenter la Raspberry Pi avec le port USB d’un ordinateur portable.
Mais nous faisons des robots mobiles, donc on cherche une solution sur batterie. Deux aspects sont étudiés ici : la fabrication du courant et la connectique.
Attention, si l’alimentation est bien de 5 volts, la puce elle-même fonctionne en 3.3 volts, ce qui nécessite des adaptations de tension et parfois une isolation pour interconnecter différents systèmes à des tensions différentes (5 volts TTL, 1.8 volts, ...).
Cet article ne traite que de l’alimentation, pas de l’interconnexion logique de signaux provenant d’une carte électronique fonctionnant en 5 volts.
La problématique
Même si nous allons tout faire pour baisser la consommation d’énergie grâce à la configuration logicielle, reste qu’il faut arriver à fournir un courant important tout en embarquant la source d’énergie.
En comparaison des quelques dizaines de mA demandés par nos micro-contrôleurs, c’est une problématique nouvelle. Bien entendu, nos moteurs consomment autant voire plus (500 mA sur le Tankobot, plusieurs ampères sur les robots de la Coupe Eurobot). On sait donc embarquer une source d’énergie de forte capacité : une batterie Lithium Ion peut contenir plusieurs ampères-heures, et même les batteries NiMH font facilement 2000 mAh.
Nos robots peuvent donc tenir plus d’une heure, même avec une Raspberry Pi comme cerveau principal ou auxiliaire. Mais il faut une bonne régulation, car en sortie d’une batterie de 12 volts et plusieurs ampères, les puces qui transforment en 5 volts ne supportent pas forcément un courant élevé.
Une première solution est le régulateur classique, comme le 7805. Comme nous l’expliquions dans cet article sur la régulation de tension, il faut toujours mettre des condensateurs (au moins par sécurité, vu le faible prix de ces composants cela ne mange pas de pain), et surtout un radiateur pour atteindre un ampère de courant consommé par le circuit alimenté.
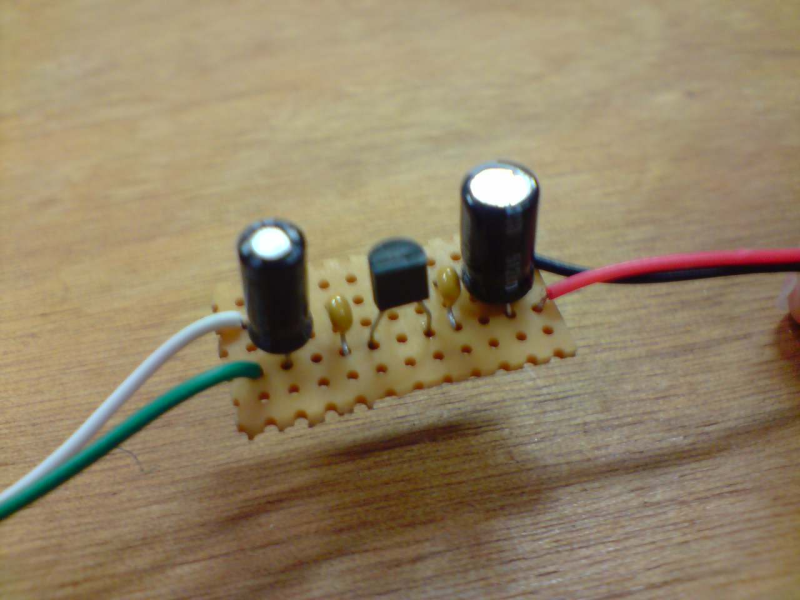
Cependant la place prise par le radiateur, et la perte engendrée par la chute de tension de 12-5 = 7 volts sont des inconvénients importants pour nos projets embarquant une Raspberry Pi. Au passage, 7 volts et 700 mA, cela signifie une puissance dissipée de près de 5 watts ! Plus que ce que ne consomme la carte...
Et n’oublions pas que la carte ne sera pas joliment posée sur un bureau de geek ou cachée derrière une télé avec 1 mètre cube d’air autour d’elle : l’air chauffé par la dissipation thermique (effet Joule) sera confiné à l’intérieur d’un robot.
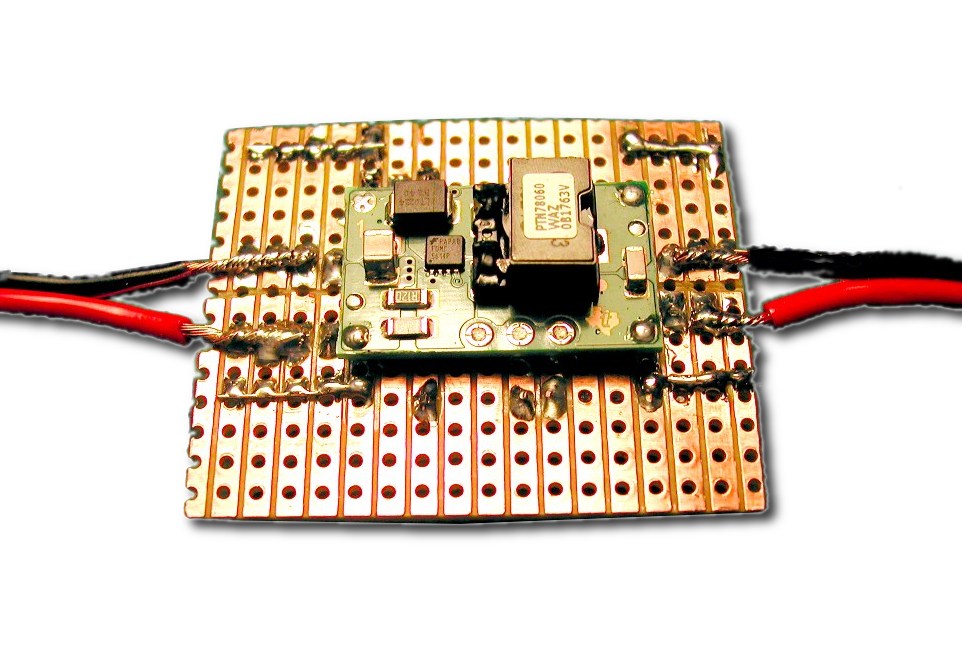
Une autre solution améliorant le rendement et diminuant ainsi la perte d’énergie, c’est le convertisseur DC/DC : on entre une tension sur courant continu, les 12 volts de la batterie, et on sort une tension de même type, mais de 5 volts seulement.
Nous avons trouvé un module capable de fournir plusieurs ampères, avec une tension de sortie réglable, c’est le convertisseur de Texas Instruments décrit dans cet article. Avec 96% de rendement, c’est un très bon élément, mais sans doute sur-dimensionné pour notre usage.
D’autres convertisseurs existent avec un rendement élevé (94%), et nous en avons retenu deux gammes :
– les convertisseurs RECOM, qui remplacent exactement un 7805 : il suffit de dessouder le 7805 et de mettre le RECOM R-785.0-1.0 à la place et au revoir les calories à dissiper !
– les convertisseurs OKI, moins cher et plus efficace que les TracoPower, une autre marque connue. Également compatibles broche à broche avec du 78xx, et selon le fabriquant les condensateurs sont superflus.
La réalisation du circuit avec ou sans condensateurs dépend des profils d’appel de courant que l’on a derrière. Si la consommation est relativement stabilisée, ou avec des montées en charge pas excessivement brutales, les capas intégrées peuvent suffire. Si par contre il y a des appels de courant, le convertisseur et ses capa intégrées risquent d’avoir du mal à étaler.
A notre niveau ce n’est pas quelques condensateurs de plus qui vont faire une grosse différence de prix et de taille. Alors autant pêcher par excès de précautions.
Donc pour la Raspberry Pi, on préférera un convertisseur avec capacités, dans un petit boîtier prenant 12 volts en entrée et avec un connecteur en sortie pour la liaison vers la RPi.
Concernant le prix, cela représente tout de même une dizaine d’euros. On trouve par exemple ce convertisseur 5 volts à 87% de rendement pour 14 euros chez Gotronic. Avis à ceux qui pensaient faire un robot à 50 euros, parce que la Raspberry Pi ne coûte que 30 euros.
Les connecteurs
Autre aspect important, il faut pouvoir interconnecter nos différentes cartes et utiliser des connecteurs standards. La présence d’un connecteur micro-USB pour alimenter la carte n’est donc pas une bonne nouvelle : ce type de connecteur est fragile (de là à penser que les constructeurs de téléphone mobile l’ont choisi pour qu’on change régulièrement de portable... ?) et il nécessite une forte pression pour se connecter et se déconnecter, pas forcément compatible avec les endroits exigus où nous allons fixer nos différentes cartes.
La première solution consiste à sacrifier une alimentation secteur munie du connecteur : on coupe 3 centimètres de câble derrière le connecteur, on le branche à la Raspberry Pi et on fait son propre connecteur d’alimentation au bout coupé. C’est gâcher une alimentation secteur, bien que la conversion 220/5 volts puisse resservir pour un autre usage, mais vu qu’on croule sous les blocs d’alims régulées/découpées, on ne va pas retenir ce cas.
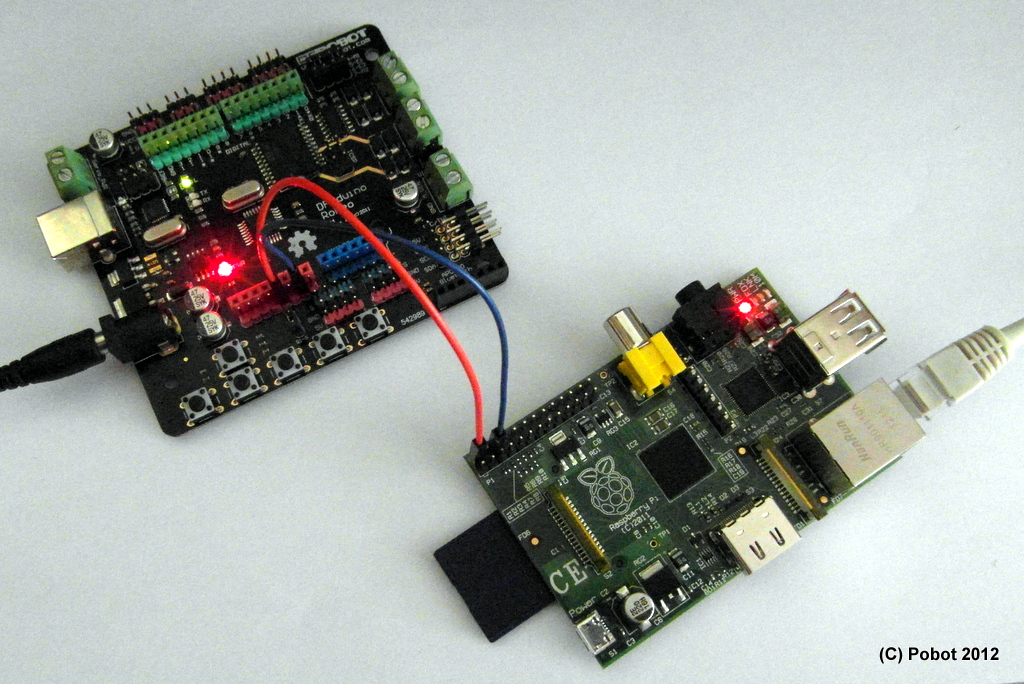
La seconde solution consiste à utiliser les pattes du connecteur d’extension (expansion port) avec un espacement standard de 2,54 mm, ce qui est parfait pour nos connecteurs utilisés en robotique.
Il suffit alors de se connecter à la patte 2 (tension 5 volts) et à la patte 6 (masse) pour pouvoir faire fonctionner la carte.





Vos commentaires
# Le 28 décembre 2016 à 12:03, par claude En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
bonjour
je suis à la recherche du shema de cablage de l’alimentation du raspberry pi3 model B
merci beaucoup pour votre aide !
merci
claude
# Le 17 février 2017 à 14:55, par Eric P. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour,
Si par schéma de câblage vous voulez dire comment connecter une alimentation, vous avez le choix entre le connecteur micro-USB ou bien une des pins identifiées 5V sur le header 40 points. Pour savoir lesquelles, Google est ton ami en cherchant "Raspberry pinout", ou "Raspberry header" par exemple.
Cordialement
Répondre à ce message
# Le 25 janvier 2017 à 09:02, par Myriam En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
bonjour
je suis novice dans l’utilisation d’un raspberry. Mais mon alimentation coupe très souvent. je pense que le connecteur micro usb est en cause. Est-il possible de l’alimenter en même temps de2 façons ? (pins et micror usb) pour une sécurité de continuité ? (Mon raspberry est embarqué sur un robot et doit fonctionner 24h/24)
merci
# Le 17 février 2017 à 14:39, par Eric P. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour,
Il n’est pas conseillé d’alimenter par les deux entrées en même temps car il peut y avoir des effets induits.
De toute manière la seule différence entre les deux est le polyfuse (fusible réarmable) qui limite le courant entrant via le micro-USB. Vous pouvez par conséquent vous contenter d’alimenter via une des pins 5V du header. Je le fais très couramment sans aucun problème.
Cordialement.
Répondre à ce message
# Le 29 décembre 2015 à 01:06, par Gil_44 En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour à tous !
J`ai trouvé ce convertisseur, DC/DC 6/23v -> 5v :
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=54275
Branché avec une batterie d’ordi de 12 v sur les pins 4 et 6(grnd), le Rpi 2+ fonctionne a merveille et le convertisseur n’a pas l’air de chauffer...
Je regarderai plus en détail plus avant.
Le convertisseur est autour de 3,5$ mais il faut rajouter les frais de port
G.
# Le 29 décembre 2015 à 01:24, par Eric P. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Merci pour cette indication qui sera certainement utile à plus d’un.
Vu le prix, ça vaut le coup. Quant au fait qu’il ne chauffe pas du tout, c’est normal :
– c’est un DC/DC (à découpage, et avec très peu de pertes par conséquent, à la différence des linéaires de type 78xx et consorts)
– la RasPi ne consomme que 300-400mA maxi si on l’utilise sans interface graphique (et sans périphérique gourmand sur l’USB)
Reste à vérifier la stabilité du 5V en sortie, et surtout si on ne passe jamais au-dessus. La RasPi ne dispose d’aucune protection sur ce plan et si le régulateur n’est pas très précis, il y a des risques. Ne pas oublier son prix d’une part (on n’a rien sans rien) et le fait qu’il est destiné au monde de la R/C, dont les constituants sont assez tolérants en général.
Répondre à ce message
# Le 27 décembre 2015 à 10:48, par Maartin10 En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour,
j’ai pour ambition d’acheter un RPi 2, mais afin de limiter les câbles, je me demande s’il serais possible d’aliment celui-ci à l’aide d’un FreePlug, qui me permet en même temps de brancher le RPi en ethernet.
Cependant l’alimentation du FreePlug (destinée à la Freebox normalement) a pour sortie 12V et 3A.
Etant novice en électrique, je pense que c’est trop élevé, et comment faire alors pour diminuer cette tension et intensité ?
Meri d’avance !
# Le 27 décembre 2015 à 11:13, par Eric P. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Une tension de 12V est bien entendu trop élevée pour la RasPi comme vous l’avez deviné. Celle-ci ne comporte pas de régulateur intégré (comme les Arduino par exemple) et ne peut donc accepter qu’une tension de 5V en alimentation, et rien d’autre (ni plus, ni moins).
Passer de 12V à 5V est très simple : il suffit d’utiliser ce qu’on appelle un régulateur. C’est un composant qui prend une tension continue en entrée, éventuellement fluctuante, et produit une tension continue fixe et stable en sortie. La génération la plus ancienne est celle des régulateurs linéaires sur lesquels porte un petit article de notre site (que j’ai écrit il y a déjà 10 ans... mais qui est toujours d’actualité)
La génération actuelle est celle des convertisseurs DC/DC. Ils fonctionnent selon un principe différent (hachage du courant) et présentent l’avantage d’avoir un rendement bien supérieur (ils ne dissipent pas sous forme de chaleur la puissance correspondant à la différence de tension entrée/sortie). On en trouve sous forme de modules destinés à remplacer pin pour pin les anciens régulateurs linéaires (ex : les modèles Traco Power : http://fr.farnell.com/tracopower/tsrn-1-2450/convertisseur-dc-dc-1a-5v/dp/2280247). On peut donc les utiliser en remplacement direct du 7805 présent sur le schéma inclus dans l’article mentionné plus haut.
# Le 27 décembre 2015 à 11:25, par Eric P. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Pour compléter ma réponse précédente, cela ne va cependant pas vraiment "réduire les câbles". Cela va juste supprimer un bloc secteur, mais le remplacer par un boitier (celui dans lequel vous allez devoir monter le petit circuit avec le régulateur afin de le protéger mécaniquement), plus une câble le reliant à l’alimentation de votre Freebox.
Au bout du compte il y aura donc toujours autant de filasse et de boitiers ;) A moins de regrouper la RasPi et le petit circuit d’alimentation dans un seul boitier, ce qui fait donc gagner un élément.
Pour en finir, il existe très certainement des montages tout faits de ce genre, proposés par des sites spécialisés pour la RasPi et ses semblables. Ils ne seront rien de plus que le montage suggéré, avec la différence d’être directement prêts à l’emploi.
Répondre à ce message
# Le 1er février 2014 à 13:41, par Storion En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour à tous,
Je réfléchis à mettre mon RPI dans un boitier muni d’une dalle lcd afin de pouvoir installer facilement mon systeme sur la table de salon et me faire une petite partie de jeux retro. 🙂
Je compte alimenter le tout par un cordon secteur relié sur une prise de courant (classic quoi)
La carte Romeo pourrait elle servir à alimenter mon RPI, ma carte controlleur LCD 12V/3A et pourquoi pas un hub USB 5V ?
Merci pour vos réponses
# Le 5 février 2014 à 07:38, par Julien H. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour,
Non, le régulateur de la carte Romeo n’aura jamais assez de puissance pour tout cela.
Il faut utiliser un convertisseur 12V / 5V comme on en trouve dans l’automobile (quelques euros) qui fournissent plusieurs ampères (1A pour la RPi et 2A pour le hub 5V).
Cordialement,
Julien.
Répondre à ce message
# Le 16 octobre 2012 à 16:23, par Nicolas En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
la pin 2 (5v) peut donc servir a alimenter la rasp ou bien en envoyer si on l’alimente par usb ?
# Le 16 octobre 2012 à 22:48, par Julien H. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Je vais tester pour confirmer mais c’est ce que j’ai compris.
# Le 17 décembre 2012 à 19:04, par ? En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour. J’ai un chargeur micro-usb de 5V et 200mA. Selon ce topic c’est donc insuffisant. J’ai également un chargeur universel d’ordinateur portable sur lequel il y a un port USB en 5V 2A. Cette fois ci je crains que ce ne soit trop n’est-ce pas ?
# Le 17 décembre 2012 à 23:02, par Julien H. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour. Le second chargeur à 2A convient très bien, car en ce qui concerne l’intensité disponible, "qui peut le plus peut le moins" : il s’agit d’un courant disponible, donc la carte ne tirera que ce dont elle a besoin.
# Le 17 février 2013 à 20:22, par Brutia En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Bonjour
c’est confirmé alors pour l’alimenter via les pin 2 et 6 ?
Merci d’avance
# Le 19 février 2013 à 10:00, par Julien H. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Non confirmé.
# Le 26 août 2013 à 15:42, par Olivier En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Je confirme que c’est possible http://www.magdiblog.fr/divers/comment-alimenter-votre-raspberry-pi-avec-une-batterie/
# Le 26 août 2013 à 16:02, par Eric P. En réponse à : Alimentation de la Raspberry Pi
En réponse à : Alimentation de la Raspberry Pi
Il suffit pour le vérifier d’analyser le schéma électronique de la carte : ces deux pins sont reliées directement respectivement à la ligne 5V et à la ligne de masse.
Ca peut aussi se tester avec un multimètre en fonction ohm-mètre (à ne peut être pas faire avec les pins de GPIO, car elles sont susceptibles).
Répondre à ce message