 PoBot
PoBot
Ayant pris connaissance du powerpoint "Draft 2008" sorti en juin 2007, nous avons eu 3 mois pour préparer des prototypes permettant de valider nos premières idées.
Attraper des balles
Pour manipuler les balles de floorball, on a envisagé des pinces, capables de s’ouvrir de différentes manières selon qu’on recherche à attraper toute balle passant devant le robot ou bien qu’on souhaite faire une saisie spécifique à gauche ou à droite, par exemple quand on a déjà attrapée une balle.
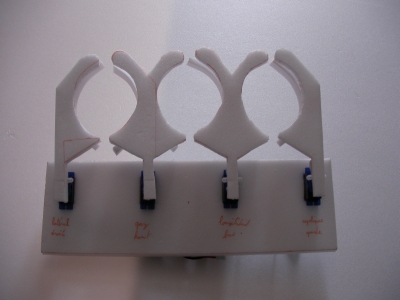

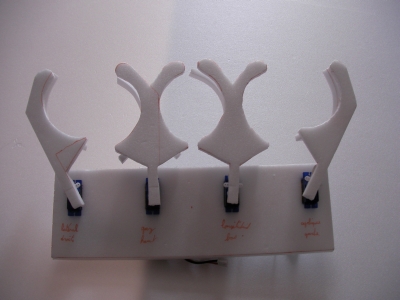
Un prototype en polystyrène a été designé et assemblé. Il a été motorisé avec des servos et une radiocommande de modélisme.
Capteurs de proximité
Nous avons fait des essais avec des capteurs infrarouge simples. Ils permettent la détection d’une présence à 10 cm. Idéal pour attraper une balle lorsqu’elle passera sous le "nez" du robot.
Pour nous amuser, nous avons même développé en très peu de temps un tracking avec un servomoteur piloté par 2 capteurs proximètres IR.
Odomètres

Les odomètres que nous avons acheté au début de l’été nous ont permis de nous familiariser avec l’acquisition de signaux en quadrature... pour finalement utiliser la bibliothèque AvrLib qui nous a permis de les faire fonctionner à merveille : la précision est impressionnante.
Chaque odomètre sera placé au plus près d’une des deux roues motrices mais restera fixé sur une roue libre, permettant d’obtenir le déplacement réel du robot, même en cas de patinement, de blocage ou de glissement des roues motrices.
La précision des 2RMHF de Scancon est de 2048 pas par tour, 10 fois plus que le nombre de pas nominal des moteurs (200 pas par tour, moteur pas à pas bipolaire classique).
Motorisation
Nous ne pouvions pas construire de chassis avant d’être fixé sur le robot que nous souhaitions construire, donc sur le règlement lui-même et la stratégie adoptée. Mais nous avons pu valider le contrôle des moteurs pas-à-pas par un prototype.

Nous avons choisi d’utiliser les contrôleurs de Soprolec, une société française qui commercialise des drivers micro pas(essentiellement pour machines-outils à commande numérique - CNC - mais qui font très bien l’affaire pour des robots mobiles) permettant une commande en micro-pas avec régulation d’intensité de nos moteurs pas-à-pas bipolaires biphases (4 fils). Nous utiliserons des SD3225.
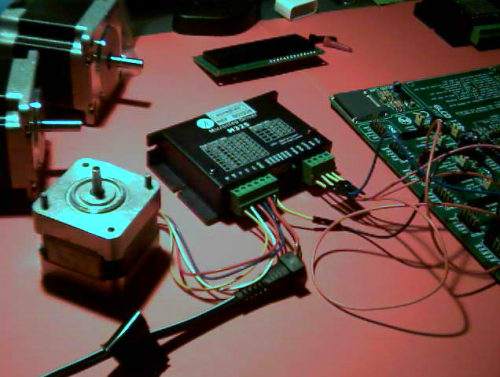
Les premiers essais sont bluffant : un couple jamais atteint avec 12 volts à 1 ampère de limitation. Autant dire que c’est très satisfaisant, puisque nous pourrions ainsi nous limiter à 2 batteries 6V sans se faire de souci pour leur durée d’utilisation (7,2 Ah). Ce serait la même configuration qu’en 2006, mais avec un couple et une vitesse que nous n’avions pas à l’époque.
Déplacement
Nous cherchons un moyen fiable et efficace pour contrôler les déplacements du robot, ie. calculer les commandes envoyées aux moteurs. Nous avons repris le principe de la logique floue qui avait bien marché en 2005 (grâce aux efforts de Patrick pour mettre au point un bon contrôleur) et nous avons mis en pratique les travaux de Frédéric, en particulier en utilisant un logiciel pour générer les commandes, Fudge.
Le résultat est très bon sur simulateur, et la prochaine étape sera de le valider sur une base roulante réelle.




