 PoBot
PoBot
Organisation du projet
La répartition des compétences est la suivante :
– Electronique : 3 personnes (dont 1 exclusivement)
– Mécanique : 3 personnes (dont 1 exclusivement)
– Informatique : 2 personnes
– Financement/gestion : 1 personne (non exclusivement)
– Documentation (site web, ateliers pédagogiques) : tous
En terme de tâches et de pourcentage de charge :
– Electronique : 20%
– Mécanique : 30%
– Informatique : 20%
– Financement/gestion : 5%
– Documentation : 25%

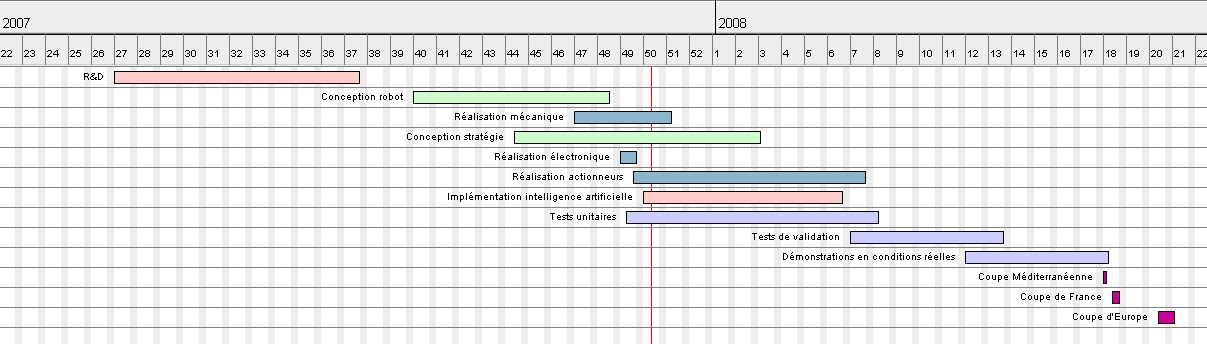
Planning prévisionnel :
– Juin 2007 - Septembre 2007 : recherche & conception des éléments de base réutilisables
– Septembre 2007 - Décembre 2007 : base roulante et algorithmes de déplacement, couches bas-niveau
– Décembre 2007 - Janvier 2008 : assemblage des actionneurs et documentation de la base roulante
– Février 2008 - Mars 2008 : tests grandeur nature, intelligence artificielle globale
– Avril 2008 : documentation, démonstrations pour chercher les problèmes éventuels en match
Stratégie
Dans un premier temps, le robot se dirige vers le distributeur vertical de roches de sa couleur. Il extrait la balle et traverse le terrain en direction du réservoir réfrigéré.
Arrivé à distance suffisante, il tire la balle par un système de tir et retourne au distributeur pour extraire les 4 roches restantes. Dans un second temps, il parcourt le terrain à la recherche de roches qu’il attrape avec une pince : s’il s’agit d’une balle de glace ou de la couleur adverse, il la relache.
Il n’y a donc pas de stockage. Le robot traite chaque balle l’une après l’autre.
Des solutions de repli sont envisagées s’il y a un problème avec le système de tir ou avec l’extraction des balles : parcours systématique du terrain à la recherche des roches dont les emplacements sont connus, transfert de la balle sans tir pour déposer dans le réservoir standard.
Des solutions plus téméraires sont également envisagées si nos progrès le permettent, mais ne seront pas étudiées tant que nous n’aurons pas de résultats suffisants avec la solution de base.
Description détaillée
Système de ramassage des balles
Une pince escamotable sous le robot permet de saisir une balle en la ceinturant complètement, pour une extraction des distributeurs verticaux correcte et une saisie sur le terrain fiable et simple.
Un aspirateur (testé et validé) va dans un premier temps attirer les balles puis saisir la balle ceinturée par la pince. l’aspirateur (composé d’une turbine dans un tube de 80 mm de diamètre) peut pivoter en son centre et ainsi amener la balle en hauteur pour la déposer sur un système de tir ou une glissière de dépose simple.
Nombre de balles stockées
Il n’y a pas de stockage prévu. Chaque balle sera traitée dès sa saisie.
Dans le pire des cas (mauvaise conjonction des éléments électronique et mécanique), il ne peut y avoir que 3 balles dans le robot : 1 dans la pince, 1 dans l’aspirateur, 1 dans le système de tir. Aucun de ces 3 systèmes n’est conçu pour conserver la balle.
Description sommaire du robot
Le robot est constitué d’une base roulante compacte (20x20x10cm) comportant deux roues de 10 cm, deux moteurs pas à pas, 2 odomètres et l’électronique permettant de faire fonctionner ce système.





