 PoBot
PoBot
Voici un schéma présentant les différentes phases d’un match avec le robot 2008. Il est toujours très important de faire des schémas et de visualiser les positions possibles du robot sur le terrain.
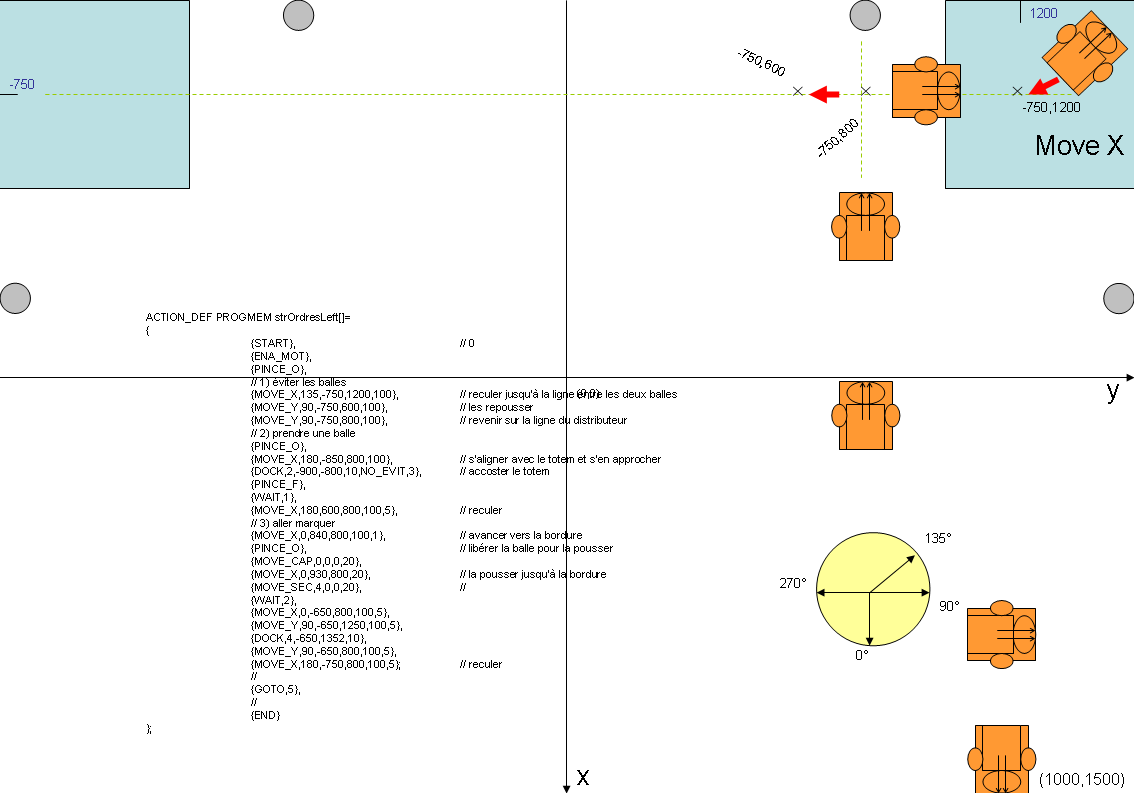
Les différentes positions du robot sur le terrain
Voici le fichier qui a servi à le créer.

Il est également très utile de visualiser le parcours du robot : avec un simulateur, c’est très facile et cela permet de vérifier qu’il n’y a pas de mouvements superflus et que les trajectoires sont optimisées. 90 secondes, c’est très court et une manoeuvre qui prend 3 secondes de trop représente déjà 10% si on compte ne la reproduire que 3 fois (par exemple des aller/retour à un distributeur en L plutôt qu’en ligne droite).
Voici ce qu’on avait visualisé lors de nos tests en logique floue.
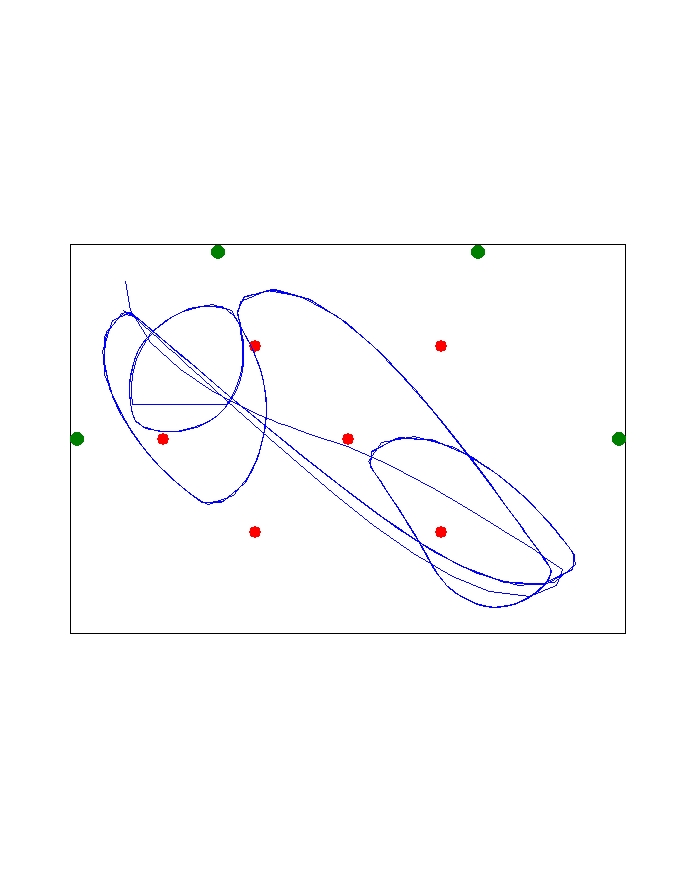
Parcours du robot pendant un match




