 PoBot
PoBot
Le robot Ma-vin est un petit robot (une quinzaine de centimètres de long) permettant au plus grand nombre de découvrir la robotique et de s’initier en quelques minutes à l’essentiel des connaissances nécessaires pour maitriser cet engin.
Si vous ne trouvez pas l’information que vous cherchiez, contactez-nous : contact@pobot.org

Son déplacement
Il s’agit d’un robot mobile autonome à motorisation différentielle. C’est à dire qu’il a deux roues motrices indépendantes : on peut donc avancer/reculer en ligne droite, et pour tourner il suffit de donner des consignes de vitesse différentes au moteur gauche et au moteur droit, par exemple des valeurs opposées pour le faire tourner sur place, ou des valeurs différentes de même signe pour qu’il décrive une courbe plus ou moins arquée.
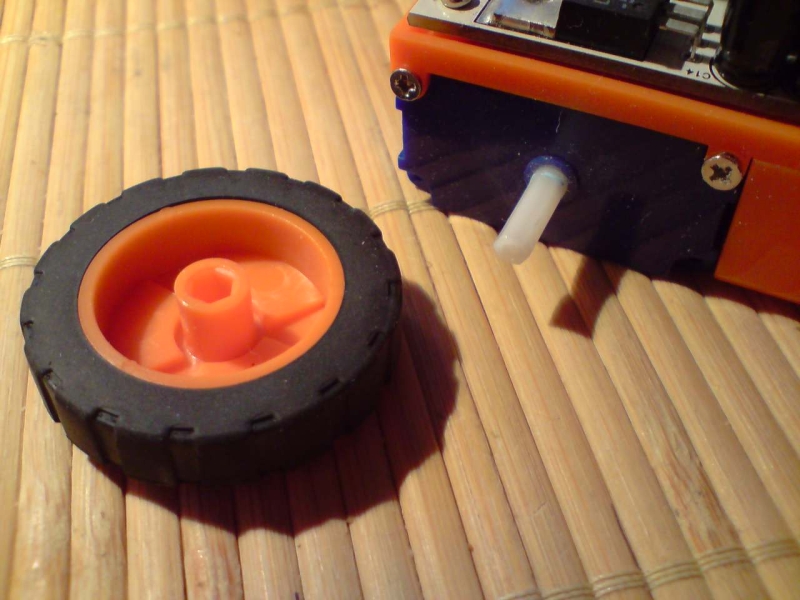
Voici une roue (gomme souple) prête à être fixée sur son axe. Le robot est conçu pour être démontable, ce qui donne de la liberté aux roues qui ont parfois l’envie d’aller voir du pays (elles se détachent). Un point de colle résoudra vos petits tracas.
Étant autonome, le Ma-vin embarque à la fois son énergie (piles ou accus) et son contrôle (une électronique programmable) lui permettant d’évoluer sans votre intervention, selon des consignes que vous avez définies (c’est très simple, vous verrez plus loin).
Il a une grande autonomie (plusieurs heures en fonctionnement avec des piles AAA) et lorsque les piles sont bien chargées, il peut atteindre une vitesse de 50 cm/s.
Présentation du hardware
Le robot est piloté par un microcontrôleur ATmega64L (de la même famille AVR que les autres Atmel que nous affectionnons).
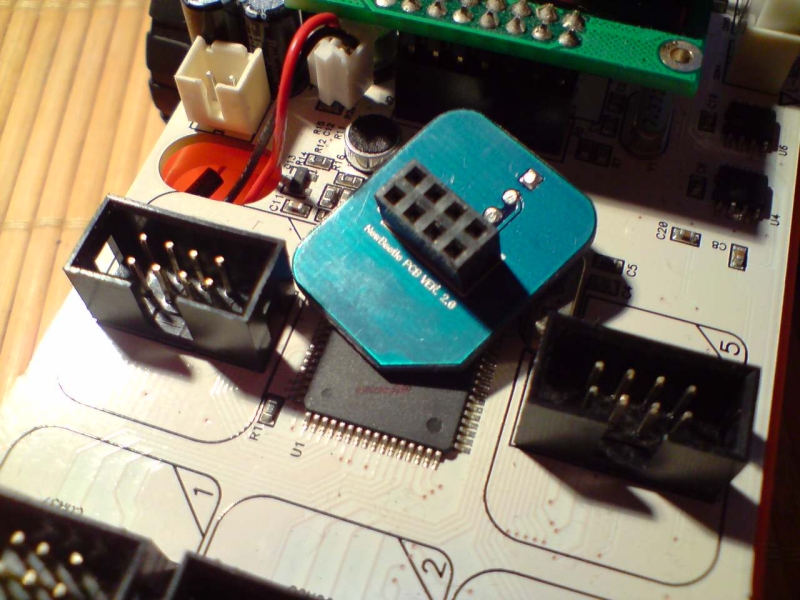
Voici une photo de la platine :
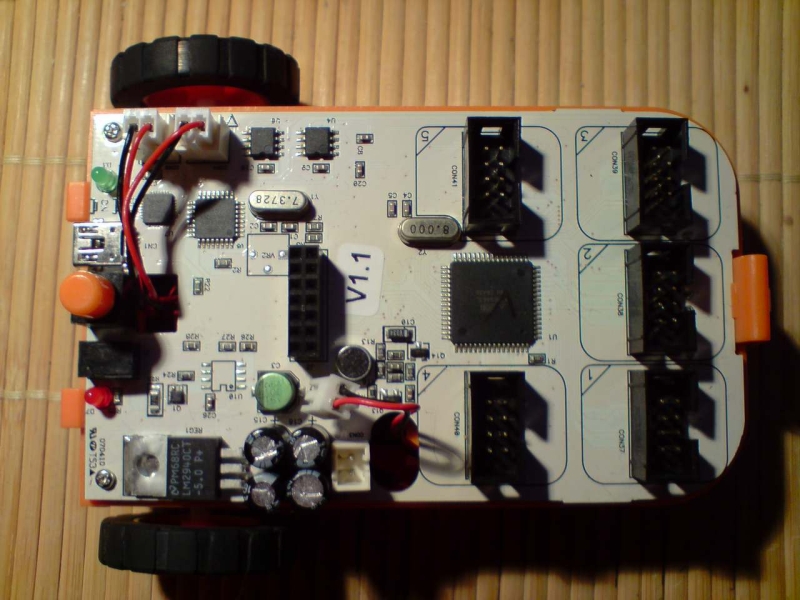
La carte mère intègre tout ce qu’il faut pour communiquer avec un ordinateur, y compris un autre microcontrôleur AVR (cette fois un ATmega48) pour gérer la communication avec l’USB pour la programmation In Situ : on peut donc utiliser le même cable pour le bootloading (téléchargement de votre programme) et pour la communication série.
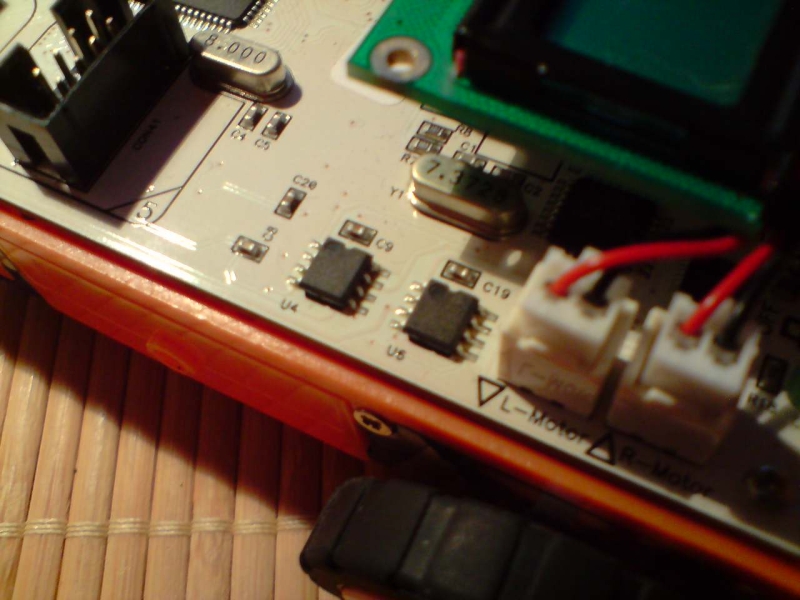
Il y a également bien sûr les drivers capables de piloter les deux moteurs à courant continu en marche avant ou marche arrière à plus d’une dizaine de vitesses différentes. Comme ils sont mignons :
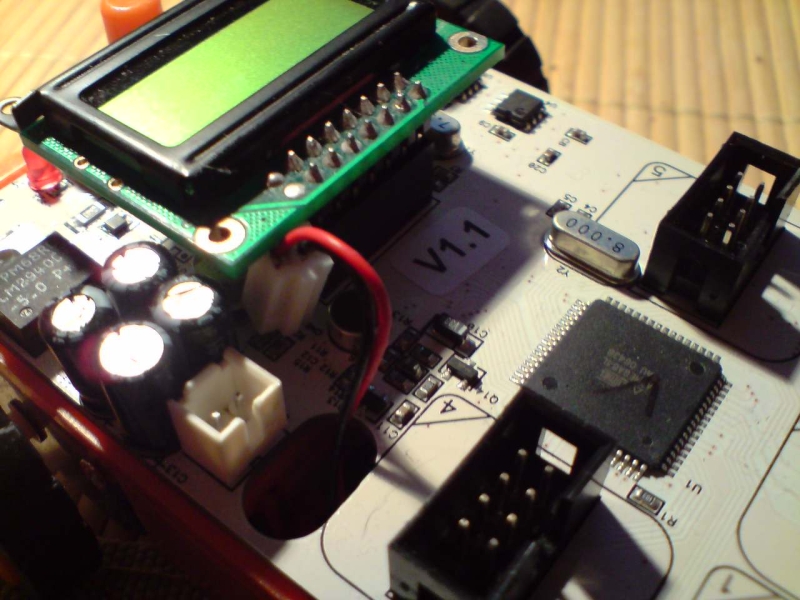
Enfin, les modules supplémentaires se connectent dans 5 emplacements (qu’on paramètre dans le logiciel pour indiquer lequel fait quoi). Notez qu’il y a eu un changement entre la version 1.0 et la version 1.1 de la platine pour les rendre moins fragile. Les nouveaux connecteurs sont en effet des HE10 de deux lignes de 4 pattes, bien robustes. Leur inconvénient est de surélever un peu plus les modules, ce qui rend difficile la fermeture du couvercle quand on utilise les emplacements 1 et 3 sur les bords de la première ligne.
Ses facultés sensorielles
Détection par infra-rouge
La première utilisation de ce robot peut se faire en cinq minutes en utilisant les détecteurs de lumière : 3 devant pour la détection d’obstacle et trois dessous pour faire du suivi de ligne.
Voici le bloc "capteurs" qui intègre les 6 détecteurs de proximité et la roue libre qui sert de troisième point d’appui.

Notez que ce n’est pas une bille mais la trajectoire du robot ne s’en ressent pas sur terrain lisse.
Microphone
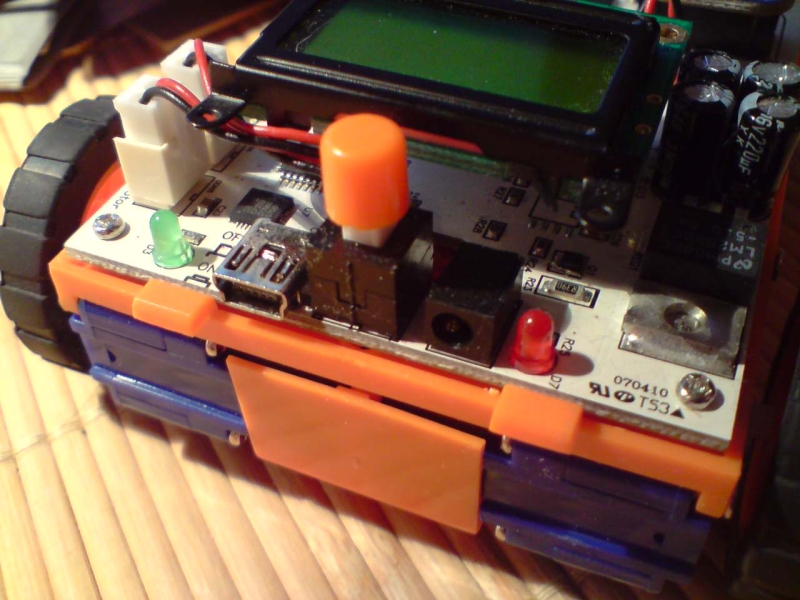
Il y a un microphone sur la carte mère du robot lui permettant de réagir aux sons ambiants (claquement de main par exemple).
Voici le micro, petit rond noir sous le câble d’alimentation sur la photo ci-dessous :
Lumière ambiante
Un capteur de lumière ambiante est également disponible pour pouvoir en faire un photovore (un robot qui est attiré par la lumière d’une lampe de poche ou qui recherche la lumière dans un labyrinthe).
Remocon
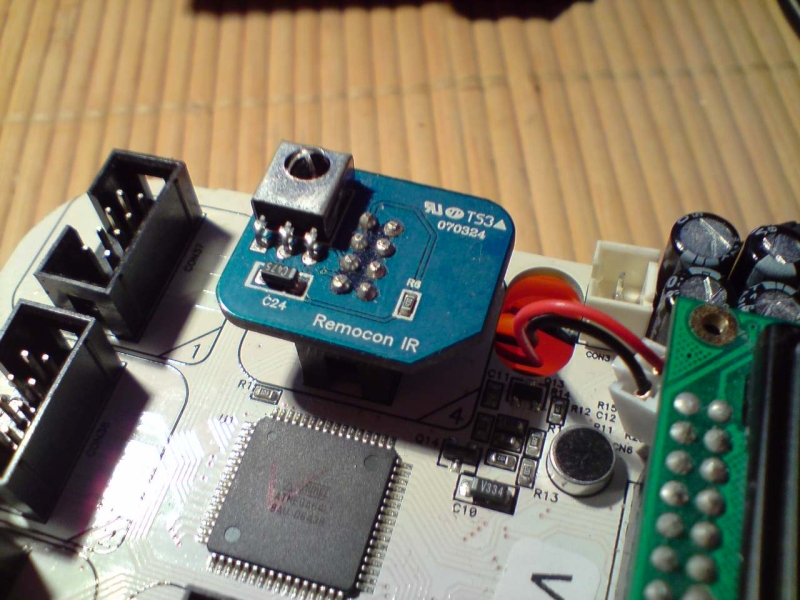
Une télécommande (remote controller en anglais, d’où remocon) est disponible pour piloter à distance le robot. Bien entendu il faut programmer son robot Ma-vin pour qu’il réagisse aux différentes touches que vous souhaitez utiliser. Consultez notre article consacré à la télécommande Ma-vin dont Robopolis nous a fait cadeau.
Voici le connecteur dans la version 1.1 du robot :
Son utilisation par le club
Ce robot est utilisé par Pobot dans le cadre de l’épreuve Robotique des Jeux de Sophia 2008
Vous pouvez voir le reportage TV tourné par Alain Fichot pour Plein Sud TV. Il est venu filmer les premiers pas des robots.
Un second reportage est disponible, cette fois lors de la compétition. Un grand succès et un beau film montrant les robots en pleine action.





Vos commentaires
# Le 28 novembre 2015 à 21:25, par Damais En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour,
je suis Professeur de technologie dans un collège, je possède 10 robots ma-vin, ils fonctionnaient très bien sous XP, on vient de migrer sous win7 pro, impossible de les faire reconnaître, le logo usb reste désespérément noir, même avec le bon driver CP2x à jour.... Que faire svp !!?? Merci
# Le 17 décembre 2015 à 08:05, par Eric P. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Cette question nous est souvent posée.
Il n’y a malheureusement pas de possibilité, hormis de faire tourner un WinXP en machine virtuelle.
Ne pas oublier cependant que le Mavin dispose du connecteur 6 points permettant de programmer le micro-contrôleur de manière native, éventuellement avec un environnement comme Arduino. Mais adieu à la programmation graphique Mavin dans tous les cas.
Répondre à ce message
# Le 8 août 2013 à 23:16, par Bert En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour,
Ce sujet date un peu mais impossible de se procurer ce robot apparemment il ne se fabrique plus.
Un équivalent ?
Cordialement
# Le 9 août 2013 à 12:08, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour,
Effectivement il n’est plus fabriqué. Il existe désormais de nombreux robots pour débuter, disponibles chez des distributeurs comme Zartronic ou Arobose.
Répondre à ce message
# Le 30 novembre 2008 à 20:02, par Human-Behind En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour,
Je souhaiterai m’acheter se robot, je voulais savoir s’il était déjà monté ou s’il fallait le monter sois même ? (je n’y connais absolument rien en electronique). Ce qui m’interesse c’est le coté programmation :) .
Autre petite question , peut on programmer en étant sous linux ou faut il forcement etre sous windows ?
Merci d’avance :)
PS : par exemple s’il y a des soudures a faire ce n’est meme pas la peine que j’essayer , par contre si c’est juste emboitter des piéces dans d’autres , comme les logos sa me vas :) .
# Le 30 novembre 2008 à 21:05, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour, le montage se fait en 10 minutes avec seulement un petit tournevis.
Tous les composants sont soudés, et pour quand même comprendre la mécanique, les moteurs, les roues et le bloc avant sont séparés : on les "clipse" ensemble puis on vis les moteurs et on maintient la plaque contenant l’électronique avec des vis. Il y a ensuite juste à connecter chacun des moteurs ainsi que le bloc des piles.
Je mettrai en ligne la vidéo du montage un de ces jours, à moins que tu sois plus rapide : tu pourras m’envoyer les photos que tu auras prises de ton montage.
# Le 30 novembre 2008 à 21:27, par Human-Behind En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Merci pour ta réponse, qui me réconforte dans mon choix, j’hésitai avec l’Asuro qui lui demande à souder des composants...
Sinon oui je pourrai t’envoyer les photos et video quand j’aurai recu mon futur ma-vin ^^.
PS : Est ce qu’il y a beaucoup de possibilité avec ce robots ? (sur youtube on voit surtout qu’il est capable de suivre une ligne noir, mais peut il faire autre chose ?) Ce qui m’interesse aussi , c’est de savoir s’il peut interpréter différrent son ? Et "analyser" différente couleur ?
Désolé pour toute ces questions, mais je veut être sur de ce que j’achete pour 150€.
Merci encore
# Le 1er décembre 2008 à 07:42, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Il peut réagir à 5 volumes sonores différents, mais pas d’interpréter les sons (par la hauteur par exemple).
Pas de détection de couleur a proprement parler : si tu utilises la programmation par blocs (graphique), chacun des blocs a des sorties vrai ou faux.
Pour la lumière, tu peux donc tester une présence ou pas. Et il n’y a pratiquement pas de distance (inférieure au centimètre).
J’allais oublier le module capteur de lumière ambiante : celui là à plusieurs niveaux, mais pas de couleurs.
Par contre, il y a beaucoup à faire avec la programmation en C : on accède alors aux entrées/sorties du capteur et on n’est plus limité par les blocs vrai/faux.
Après, il s’agit d’un microcontrôleur Atmel avec pas mal de mémoire : Michel (un visiteur assidu que je salue par la même occasion) demandait si on pouvait créer de nouveaux capteurs. C’est un travail que je compte mener, sans garantie dans le temps car nous avons d’autres projets, mais c’est faisable.
Il faut bien voir que c’est un robot de découverte. Si tu as déjà en tête des détections particulières, et que tu penses y investir du temps, autant passer tout de suite aux Lego NXT, tu ne seras pas déçu (alors que je comprends tout à fait qu’on puisse se lasser d’un Ma-vin une fois qu’on y a passé un paquet d’heures).
L’intérêt du Ma-vin est de pouvoir se comparer à d’autres et par son prix on peut s’équiper facilement. Améliorer un algorithme de suivi de ligne pour diminuer par deux son chrono au tour, c’est intéressant si on peut comparer aux autres (et c’est pour ça qu’on organise des concours).
# Le 1er décembre 2008 à 10:56, par Human-Behind En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Merci pour ces réponses trés compléte. Et oui effectivement j’ai oublié de le préciser mais je programme en C.
Est il par la suite possible de rajouter ses propre modules ? Je pense notamment à un module wifi ? Ou bien une sorte de webcam miniature ?
Mon idée serait de pouvoir transmettre ce que "vois" le ma-vin sur mon PC via wifi , pense tu que cela est faisable (au niveau hardware, car niveau programmation sa ne pose pas trop de probleme, je sais utiliser les sockets etc...) ?
Encore merci :) .
# Le 1er décembre 2008 à 12:26, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Dans ce cas là effectivement ça vaut le coup d’expérimenter. Le robot n’est pas fait pour ça à la base donc ce serait totalement nouveau mais faisable.
Plutôt que du Wifi, il existe de la liaison série sans fil (Xbee), plus pratique à utiliser. Il y a aussi des caméras et d’autres capteurs.
Si tu es intéressé, envoie moi un mail et on commencera un projet commun, en commençant par retrouver les noms de chacune des pattes des connecteurs.
# Le 1er décembre 2008 à 13:28, par Human-Behind En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Oui je suis trés interessé pour faire ce petit projet (bien que je n’y connaisse rien en eletronique, pour te dire je ne sais meme pas ce qu’est une liaison série ^^ ), par contre je n’aurai le ma-vin qu’a Noël . Donc je te recontacterai début Janvier je pense :) . Dommage que ton association soit si loin de ma ville (Tours) , sinon j’aurai trés certainement rejoint l’association .
Encore merci :) .
# Le 1er décembre 2008 à 15:29, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Ok, je vais voir pour créer des petits modules de remplacement avec une led par patte.
Pour tous, n’hésitez pas à participer à nos activités, même à distance.
# Le 2 décembre 2008 à 12:47, par Human-Behind En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour j’ai quelques derniere questions avant de faire mon achat final :
– Je programme en C et je n’aurai donc pas besoin du logiciel de programmation graphique (j’utiliserai avr-gcc pour compiler), je voudrais savoir si je serai quand même obligé de programmer en étant sous windows ou bien si je pourrai programmer en restant sous linux ? Autrement dit, pourquoi a-ton besoin de windows pour programmer le ma-vin ?
Pour moi la réponse a cette question est trés importante car je suis sous linux et sa m’embeterai bien de devoir installer windows uniquement pour pouvoir programmer mon ma-vin :).
– J’ai déjà une idée d’un petit programme et je voudrai savoir si c’est faisable : Mon programme permettrait de savoir combien de métres a parcouru le ma-vin (approximativement), pour cela j’ai besoin de savoir si le ma-vin roule ou ne roule pas , peut on savoir cela (notamment grace à une fonction ) ?
– 3eme question : Est ce que le ma-vin dispose d’une mémoire de stockage (même minime) pour sauvegarder des données ?
– Une derniere question : J’ai une psp qui dispose d’un port IR et sur cette psp je peut programmer des programmes (lol), je voudrai savoir s’il était possible de controler le ma-vin grace à ma psp (grace à l’IR), en programment ce qu’il faudat programmer (comme l’envoi de donnée de la psp au ma-vin) ?
Voila mes 4 derniere questions, la plus importante est celle concernant linux (cependant si je peut utiliser wine sa ma conviendra).
Encore merci Julien pour toute les réponses que tu fournis !!!
@ bientot
# Le 2 décembre 2008 à 14:33, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Hello,
1) le Ma-vin utilise un bootloader, une petite partie de son programme interne qui attend sur la liaison série USB qu’un nouveau programme arrive. Or le logiciel qui permet d’envoyer ton programme sur cette liaison série n’existe pour le moment que sur Windows. A tester si un émulateur sous Linux serait suffisant.
2) tu peux savoir quelle est la consigne de vitesse en cours dans le robot, mais pas sa vitesse réelle (dépend du niveau des piles) ni s’il est bloqué. Donc à mon avis il faut abandonner l’odométrie (compter de combien il avance ou combien il tourne)
3) oui, il dispose d’une mémoire, voir la datasheet de l’ATmega64. Par contre il faut vérifier ce que tu veux y stocker. Il doit être possible d’utiliser une mémoire I2C en faisant un module "maison" (et si les ports I2C sont disponibles sur l’un des 5 connecteurs)
4) ça dépend du port IR de ta PSP : s’il est restreint à un protocole (genre IrDA) tu ne pourras pas mais si tu peux déclencher n’importe quelle séquence, il sera(it) possible d’analyser la trame de chacun des boutons de la télécommande Ma-vin et le reproduire sur la PsP.
# Le 6 décembre 2008 à 18:19, par mic En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonsoir , connaissez vous à quoi correspondent les pattes de chaque module de ma-vin .Un petit module avec une mémoire serait intéressant pour pouvoir garder quelques programmes et éviter de télécharger à chaque fois .
# Le 6 décembre 2008 à 23:20, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Aussitôt demandé, aussitôt fait : http://www.pobot.org/Hardware-du-Ma-vin.html
Répondre à ce message
# Le 31 mars 2009 à 18:43, par ? En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonsoir amis passionnés de robotique.
Je serai intéressé pour faire l’acquisition de ce robot ; j’ai donc quelques questions a son sujet :
1/ Est-il possible de savoir quel distance parcours le robot ? Par ailleurs, est-ce que celui-ci roule à vitesse constante ou est-ce que cela dépend de la capacité des piles ? Est-il possible de rajouter des capteurs de rotation de roue (ou de par exemple dire au robot de faire trois tours de roue ("solution pour calculer la distance parcourue)) ?
2/ Est-il possible que le robot puisse nous renvoyer des données (genre, combien d’obstacle il rencontre) et de les réceptionner via un autre programme sur l’ordinateur ?
3/Est-ce qu’il est possible de programmer le robot à l’aide d’un code que l’on a sois-même réaliser ou est-ce que l’on peut seulement utiliser le logiciel de codage "graphique" (qui me semble assez limité) ?
4/ J’ai remarqué dans vos commentaires que le robot était disponible à 150€, où puis-je me procurer le robot à ce prix ?
Merci pour vos réponses :)
Cordialement, Nico.
# Le 1er avril 2009 à 12:57, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
1/ Non, on ne peut pas savoir quelle distance, et sa vitesse ça dépend de la capacité des piles. Oui c’est possible, on est en train d’y travailler (même techno que le Pobot Easy, voir la rubrique concernée)
2/ Oui, il est possible d’exploiter la liaison série mais pas en mode "graphique" et il faudrait faire un test que je n’ai pas encore fait :)
3/ Oui, on peut le programmer de manière standard avec WinAVR (éditeur de code) et AVR-Gcc (compilateur). J’ai fait un petit article (s’il faut le compléter, dites moi quelles infos vous manquent)
4/ Le robot est dispo chez Robopolis à ce prix, ou même moins cher chez Lextronic il me semble. Pour 129 € chez Robonova (j’ai une préférence pour Robopolis mais très légère, vu qu’on n’est pas beaucoup sponsorisé..)
Répondre à ce message
# Le 20 juin 2011 à 13:40, par lolomarilo En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour Julien, j’ai récemment fait l’acquisition de ce petit robot bien sympathique pour initier mon fils (et moi avec :) 😄 aux joies de la robotique.
Hélas je tombe sur un couac : je ne parviens pas à charger le code généré par le logiciel "Ma vin" fourni. Le logiciel m’indique que je dois vérifier que mon robot est bien connecté et qu’il ya un problème de port
Hors mon robot est bien connecté et allumé, j’ai bien installé le driver, la petite led verte est bien allumée.
J’ai essayé deux cables USB différents.
J’ai installé le logiciel sur 2 OS différents : Windows 7 et windows XP Pro ==> même problème.
Informations importantes : qd je branche le robot sur la prise USB, il est vu dans les périphériques comme un port "com 3" et non usb.
D’ailleurs le logiciel "Ma vin" ne m’indique pas que le robot est connecté (le symbole USB dans la barre du menu reste "bleu".
Auriez vous une idée ????
Merci d’avance
Bien cordialement
Lolomarilo
# Le 20 juin 2011 à 23:01, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
C’est normal qu’il soit vu comme un port COM3, et cela signifie que le driver CP2x a bien été installé.
1) il faut redémarrer le logiciel Ma-vin après avoir installé le driver et connecté le robot.
2) pour télécharger dans le robot, il faut non seulement le connecter, mais également appuyer sur le bouton orange du Ma-vin.
# Le 2 février 2012 à 15:08, par Adrien En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
J’ai le même problème.
J’ai installé la dernière version du soft. Le driver est la version 6.5.
Je travaille sous windows 7 (version familiale). Le MAVIN que j’utilise est un 1.1. J’ai essayé de faire fonctionner MA-VIN en tant qu’administrateur, en mode compatibilité XP, rien n’y fait.
Dès que j’essaye de télécharger, j’ai le message "Failed to open a port. Make sure the download cable is connected "
# Le 2 février 2012 à 15:52, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour,
Il faut faire fonctionner Windows 7 dans un mode de compatibilité avec les versions antérieures (XP, Vista).
# Le 4 février 2012 à 18:45, par lolomarilo En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour Adrien, j’ai eu le même souci que toi : la seule solution que j’ai trouvée et qui fonctionne : lancer une image virtuelle "Windows XP" et connecter ton robot DANS la machine virtuelle
CDt
Lolomarilo
Répondre à ce message
# Le 27 octobre 2008 à 22:36, par ? En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonsoir , le seul inconvénient est que si vous mettez un point de colle sur les roues comment ferez vous pour mettre à la la place les roues crantés pour mettre les chenilles car sur le site Hitec on voit bien que les roues ont été changés pour mettre l’accessoire
# Le 27 octobre 2008 à 23:44, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bien vu. J’achèterai un autre robot ! Blague à part, je ne mets pas de colle car justement je préfère conserver intact le robot. Mais comme le Ma-vin nous sert à des courses de vitesse, la configuration "chenille" ne sera pas intéressante pour beaucoup d’entre nous alors que faire des tours et des tours dans le même sens nécessite d’avoir des roues toujours fixées au même endroit, ce que seule la colle peut faire. Ne le faites que lorsque les roues se sont détachées pour la 20ème fois en une soirée (ce qui ne se produit qu’en cas d’utilisation très intensive !)
# Le 27 octobre 2008 à 23:57, par ? En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
ou charger les roues avec un peu de plastique liquide pour diminuer le diametre , mais à essayer avec prudence
# Le 6 février 2009 à 22:15, par ? En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonjour. J’ai un travail à faire avec ce robot dans ma section. Je suis en seconde. J’aurais voulu savoir qu’est ce qu’il faut utiliser pour qu’il puisse détecter une lumière (de poche par exemple). Enfin comme vous le specifiez plus haut mais j’ai des pbs. Svp aidez moi. Cordialement.
# Le 6 février 2009 à 22:38, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Bonsoir,
Il faut utiliser le capteur de lumière décrit dans le manuel. Est-ce que tu l’as identifié ?
# Le 10 février 2009 à 19:10, par ? En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Salut. merci de ta réponse si rapide. Oui j’ai lu le manuel et d’après ce que j’ai compris c’est le capteur Cds non ? je ne comprends pas son fonctionnement avec son intensité de lumière allant de 0 à 5 avec les signes " = <> ". J’ai beau eu essayer tout plein de programme pour essayer de le faire marcher mais mon ma vin ne détecte rien ...
# Le 10 février 2009 à 22:54, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Reprends les exemples fournis avec le Ma-vin. Tu as bien pensé à sélectionner la bonne position pour le capteur ? Envoie-nous une copie d’écran de ton programme d’essai.
# Le 11 février 2009 à 12:47, par ? En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Euh désolé mais c’est quoi les exemples fournis avec le robot ma-vin ? Et pour les capture d’écran je ne peux malheuresement pas ayant le robot et le logiciel au lycée ...
# Le 11 février 2009 à 19:18, par ? En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Qu’appelles tu les exemples fournis avec le roobot Ma-vin ? Sinon oui j’ai bien sélectionné la bonne position pour le capteur...
# Le 12 février 2009 à 16:12, par Julien H. En réponse à : Présentation du robot Mavin
En réponse à : Présentation du robot Mavin
Lorsqu’on installe le logiciel, il y a dans le répertoire créé sur ton disque tout un tas d’exemples pour chacun des modules.
Répondre à ce message