 PoBot
PoBot
 Hardware du Ma-vin
Hardware du Ma-vin(Retrouvez nos autres articles sur le robot Hitec Ma-vin)
Le Ma-vin a une belle architecture matérielle : un microcontrôleur puissant, un système de plugins électroniques, etc..
Nous allons donc pouvoir nous en servir au-delà de ses capacités initiales et notre projet est de développer nos propres circuits à brancher dessus.
La puce programmable
Le microcontrôleur utilisé sur le Ma-vin est un ATmega64L-8AU de la famille AVR du fabricant Atmel (c’est la même technologie que 90% des circuits et robots qu’on utilise dans notre club de robotique).
ATmega64 signifie que c’est un gros circuit en comparaison du petit ATmega8 (ex : Arduino), du moyen ATmega16 et du grand ATmega32 (ex : robot de la Coupe de France 2008). A tel point que pour loger ses 64 pattes, il faut un format particulier. Ici, c’est un boitier TQFP (Thin Quad Flat Package) soit un carré de 14 mm de côté et seulement 1 mm de hauteur.
Autant dire que c’est petit. On distingue quand même le point en haut à gauche indiquant le coin d’où commence la numérotation des pattes, de 1 à 64 en commençant par le côté à gauche du point et en tournant dans le sens inverse des aiguilles d’une montre.
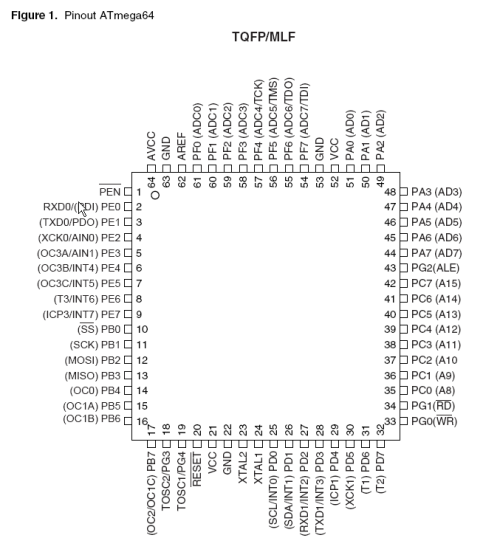
Il existe encore plus petit : le MLF (micro lead frame) qui ne fait que 9 mm de large !
Les connecteurs de modules
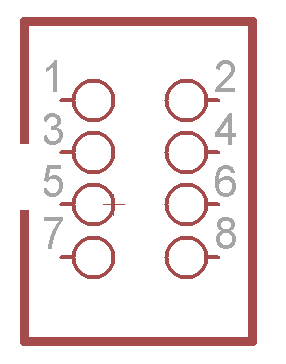
Au format standard HE-10, mais en 2 lignes de 4 ce qui est moins classique, ces connecteurs sont bien au pas de 2,54 mm et pourront donc être utilisés avec nos circuits et câbles classiques.
Un petit rappel sur les connecteurs de ce type. On les trouve par exemple derrière les disques durs IDE ou les lecteurs de disquette (si ça existe toujours), avec bien plus de pattes bien sûr. Je prends ces exemples pour expliquer comment trouver le sens et la numérotation des pattes.
En regardant en lumière rasante à gauche de l’encoche, vous remarquerez un triangle. Cela signifie que le 1 est de ce côté. Pas aligné avec le triangle, mais de ce côté de l’encoche et sur cette face. Particulièrement bon à savoir quand il n’y a pas d’encoche.
Donc une fois qu’on a trouvé le 1, les 7 autres pattes du connecteur se déduisent en énumérant en quinconce (ouvrez le connecteur femelle d’une nappe de lecteur CD/IDE/disquette pour comprendre) : le 2 est derrière le 1 et le 3 est à côté, etc..
Chacun des emplacements de module a le même câblage pour l’alimentation : tension nominale sur la patte 1 et masse sur la patte 7.
| Patte | Signal |
|---|---|
| 1 | Vcc (tension) |
| 7 | Gnd (masse) |
Le micro-contrôleur est équipé d’un convertisseur analogique numérique sur les 8 pattes du port F. Chacun des modules aura donc une entrée analogique à disposition.
| Patte | Signal |
|---|---|
| 1 | Vcc (tension) |
| 5 | Entrée analogique (PF0 à PF4) |
| 7 | Gnd (masse) |
Ensuite, chacune des pattes est associée à une entrée/sortie du micro-contrôleur. Voici la répartition par modules (NC signifie non connecté) :
Module n°1
|
Module n°2
|
Module n°3
|
Module n°4
|
Module n°5
|





Vos commentaires
# Le 7 décembre 2008 à 08:56, par mic En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Merci Julien pour l’article sur les modules de ma-vin , mais ou trouver les connecteurs qui sont sous le module ? Penses tu que l’on puisse rajouter une mémoire pour conserver les programmes dans ma-vin .Si on arrive à fabriquer d’autres modules , il serait intéressant de savoir combien sont intéressé et en faire fabriquer par une entreprise pour ceux qui n’ont pas le matériel pour en faire . Qu’en penses tu ?
# Le 7 décembre 2008 à 09:49, par Julien H. En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Oui, une mémoire I2C me semble possible sur le connecteur qui a les pattes PORTD.0 et PORTD.1
J’ai justement une petite mémoire à disposition :)
Pour le connecteur, il faut prendre de la barette sécable femelle HE14 (référence 08006 sur www.gotronic.fr) et couper deux lignes de 4, ce que je vais m’empresser de faire cet après-midi :)
# Le 8 décembre 2008 à 14:47, par mic En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Alors Julien as tu commencé à faire des essais avec une mémoire pour ma-vin ?
# Le 8 décembre 2008 à 21:06, par Julien H. En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Non, j’ai un problème avec la tension qui n’est pas régulée à 5V. Du coup ça prendrait de la place de mettre un régulateur partout, faut que je trouve si c’est normal et s’il y a une solution plus simple.
# Le 26 décembre 2008 à 16:21, par Fabien En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Bonjour,
Deux petites questions car je viens de faire l’acquisition d’un ma-vin.
1/ Est-il normal que lorsque je mets le robot sous tension, j’ai les 2 LEDS du milieu qui s’allume sur le connecteur de LEDS et le 8 par défaut sur le FND ?
2/ Ne peut-on pas activer/desactiver la tension sur un connecteur ?
La doc n’est pas des plus explicite, merci par avance
# Le 26 décembre 2008 à 21:54, par Julien H. En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
C’est normal, car les signaux d’un connecteur ont des valeurs par défaut. Ce n’est pas intentionnel et cela disparaitra à la première utilisation du module sur ce connecteur.
D’ailleurs ça se reproduira à chaque fois que vous changerez de module sur un même connecteur : les signaux 0 ou 1 peuvent avoir des sens différents selon les modules (par exemple, 0 peut vouloir dire "pas de son" sur le module buzzer mais dire "segment allumé" sur le module 7 segment.
Donc concernant 2, on ne peut pas désactiver la tension (c’est à dire l’alimentation 5 volts) sur un connecteur, mais on peut configurer les signaux pour éteindre son module (en utilisant un programme ultra simple avec seulement 1 brique START, une brique du module concerné et une brique END.
Répondre à ce message
# Le 17 juin 2009 à 15:01, par Banita Daniela En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Système électrique de la carte mère ?
# Le 30 juin 2009 à 16:05, par Julien H. En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Bonjour,
C’est une question ?
Cordialement, Julien.
Répondre à ce message
# Le 7 décembre 2008 à 10:34, par mic En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Ce que je n’ai pas trop compris c’est que l’on peut mettre les modules ou l’on veux sur les connecteurs pourtant d’aprés le tableau les pattes n’ont pas toutes les mêmes fonctions .
# Le 7 décembre 2008 à 21:38, par Julien H. En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Effectivement, mais c’est justement le principe des microcontrôleurs : toutes les pattes ont les mêmes possibilités, et c’est la configuration qui permet de choisir la fonction.
Donc chacun des connecteurs a des pattes différentes (hardware) et c’est quand vous indiquez la position de votre module que le programme peut assigner les bonnes valeurs aux pattes équivalentes (software).
Ainsi PB0, PD0, PD4, PE0 et PE7 sont des noms différents de pattes différentes, et même sur des ports différents (port = groupe de 8 pattes, ici B, D et E) mais vont toutes servir à gérer le son ou lire la valeur du capteur de lumière ou analyser le signal IR de la télécommande selon le module et l’emplacement.
# Le 8 décembre 2008 à 08:36, par mic En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Bonjour , effectivement on peut mettre les modules sur n’importe quels connecteurs et ils sont reconnus automatiquement sauf celui IR pour la télecommade auquel il faut affecter une position , pourquoi ?
# Le 8 décembre 2008 à 14:17, par Julien H. En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Non, impossible qu’ils soient reconnus automatiquement. Auxquels faites-vous référence ? Refaites le test car c’était un hasard si ça a fonctionné sans préciser la position.
# Le 8 décembre 2008 à 14:37, par mic En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
il y a quelque chose qui m’échappe . Par ex lorsque le module leds est mis sur l’un des 5 connecteurs il n’y a pas besoin de mettre le no du connecteur pour que le module fonctionne , tandis que l’on est obligé de mettre le no du connecteur ou est le module IR
# Le 8 décembre 2008 à 14:44, par mic En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
oui j’ai compris , je faisais une erreur , tout fait d’accord il faut bien préciser l’emplacement .
Répondre à ce message
# Le 7 décembre 2008 à 09:32, par mic En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
Quels sont les noms des connecteurs 1 à 5 et il en manque 2 . Il y en a 7 en tout
# Le 7 décembre 2008 à 09:53, par Julien H. En réponse à : Hardware du Ma-vin
En réponse à : Hardware du Ma-vin
J’ai pas tout compris. Je parlais des 5 emplacements des modules optionnels (numérotés de 1 à 5).
Les deux connecteurs dont tu parles, c’est le LCD et le bloc avant ? Je le ferai plus tard, pour l’instant c’est pas pressé. Mais effectivement c’est une bonne idée de les utiliser aussi.
Répondre à ce message