 PoBot
PoBot
 Forum de l’embarqué libre aux JM2L 2010
Forum de l’embarqué libre aux JM2L 2010Lors des Journées Méditerranéennes du Logiciel Libre, un mini-forum consacré aux solutions embarquées libres était proposé. Un petit groupe des Pobots y a assisté (et même notre robot bipède, à base d’Arduino open source).
Site officiel de l’atelier des JM2L 2010

Les intervenants
L’association Linux Azur présentait des plateformes OMAP (cartes électroniques à base du processeur ARM de Texas Instruments).
Un ingénieur de Texas Instruments était présent. Nous avons pu discuter des différentes solutions pour la robotique : besoin d’entrées sorties à accès temps réel, intérêt pour des bus I2C ou SPI, faible coût mais performances importantes pour le traitement d’images.
Michael Opdenacker de Free Electrons était également présent. Sa société fait la promotion de Linux sur les systèmes embarqués et propose de nombreuses formations.
D’autres exposants présentaient des cartes sur tout type : Cortex A8, ARM7, ARM9, etc... Pour ma part, j’ai présenté les robots "simples" du club, utilisant un microcontrôleur AVR, et nos tentatives pour obtenir plus de puissance de calcul et de facilité de programmation (Linux), notamment nos ateliers autour des Mini2440 de FriendlyARM (chipset Samsung).
Les cartes présentées
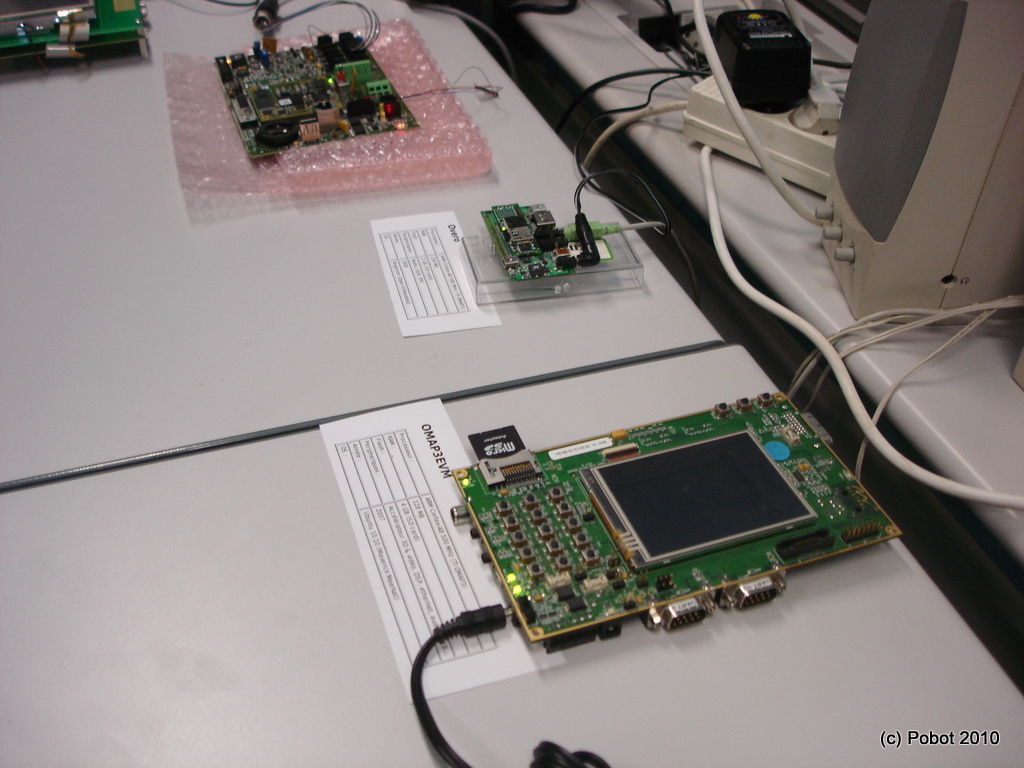

Beagle Board xM
Cette carte a une belle histoire. C’est la première carte OMAP de Texas Instruments, et sans doute la plus connue.
Site officiel de la Beagle Board
Panda Board
Une version plus "sauvage" que le Beagle ?
CALAO USB
ARM à la sauce Atmel était aussi représenté, par l’intermédiaire de la petite carte des Grenoblois de CALAO.
Site officiel de CALAO Systems
Gumstix Overo
Nous connaissions les premières versions (jusqu’à la Robostix). La nouvelle génération a encore rapetissé. Espérons que les problèmes de périphériques (port COM, Bluetooth) ne soient plus qu’un mauvais souvenir.




