 PoBot
PoBot
 Balises radio (non abouti)
Balises radio (non abouti)En 2005, Henri a proposé d’utiliser les ondes radio pour déterminer la position du robot sur le terrain.
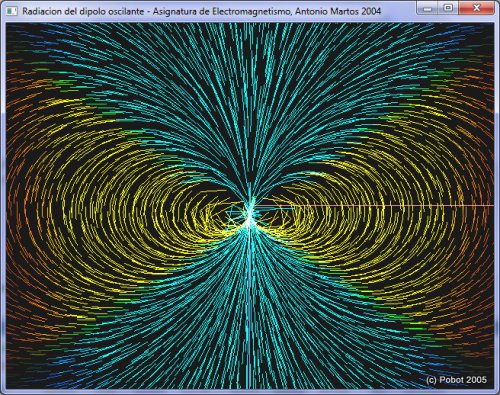
Le principe : une balise émet un signal radio. L’onde émise forme des boucles alignées avec l’antenne émettrice (dipôle). Sur le robot, une antenne réceptrice peut capter le signal ; si on recherche le maximum d’intensité, alors on obtient un alignement de l’antenne perpendiculairemenet à l’enveloppe de l’onde.
Prise en compte du commentaire de Stephan : c’est le minimum d’intensité ("nul de champ") qu’il faut chercher.
L’idée est intéressante : c’est le principe utilisé par les sauveteurs de montagne pour retrouver des skieurs perdus. Un appareil appelé ARVA porté par le skieur émet un signal, et les sauveteurs sont équipés d’antenne qui leur font suivre l’onde jusqu’à la position émettrice. Ils parcourent alors la boucle jusqu’à rejoindre le dipôle émetteur.
A cette occasion, nous avions découvert ce petit outil réalisé par Antonio Martos (fondateur de Metria.es) pour simuler les ondes d’un dipole :
Application robotique
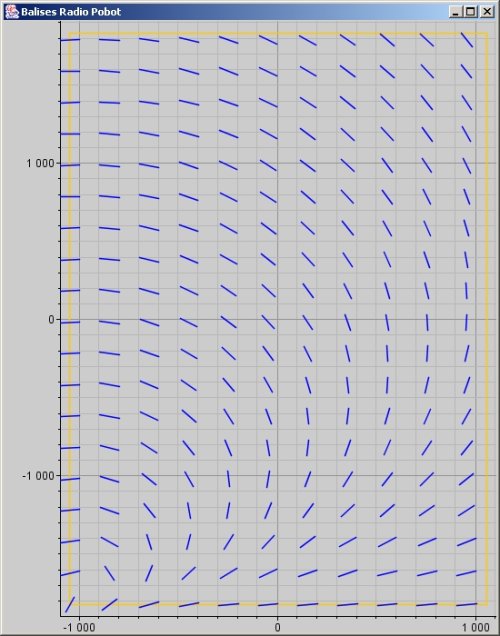
Pour notre balise, l’objectif n’est pas d’emprunter ce chemin et de revenir à la source, mais de mesurer l’angle formé par l’antenne alignée au maxium pour la position actuelle. En effet, pour une source donnée positionnée à un coin du terrain, chaque angle correspond à un "rayon" unique (0° pour un côté, 90° pour l’autre côté comme sur le schéma ci-dessous). J’utilise le mot rayon comme si nous étions en présence de cercles concentriques : le même angle est présent qu’une seule fois dans un quart de cercle.
En utilisant deux balises (une à chaque coin), on obtient deux angles, le minimum nécessaire pour une triangulation. Il faut calibrer l’émetteur pour avoir une correspondance entre les deux angles, puisque la forme des boucles ne permet pas de résoudre par des calculs aussi simples qu’avec des cercles.
Voilà une simulation que nous avions réalisée pour envisager la détection. Le code source (Java) est disponible.
Résultats
Le projet est abandonné mais il ne tient qu’à vous de le reprendre.
Pour un petit terrain, il faudrait une grande précision. Mais pour un robot évoluant en extérieur et devant retourner à sa base, cela peut s’avérer une solution à tester, pour ne pas recourir à un GPS. L’avantage est également de revenir aligné.
Prise en compte du commentaire d’Eric : en montagne, les sauveteurs travaillent en pleine nature, généralement après une avalanche qui malheureusement détruit tout sur son passage : il n’y a donc pas d’éléments susceptibles de trop perturber le signal, ce qui ne sera pas le cas pour un robot mobile en environnement urbain ou pavillonnaire.





Vos commentaires
# Le 21 août 2013 à 15:47, par Guillaume En réponse à : Balises radio (non abouti)
En réponse à : Balises radio (non abouti)
Bonjour,
je trouve cette idée inintéressante.
Avez vous avancé sur ce sujet.
Je pense que c’est une bonne technique pour localiser un robot tondeuse.
# Le 21 août 2013 à 22:27, par Julien H. En réponse à : Balises radio (non abouti)
En réponse à : Balises radio (non abouti)
Bonsoir,
Non, nous faisons uniquement de la localisation indoor où des solutions optiques sont satisfaisantes. La localisation outdoor fonctionne très bien avec des lasers ou des GPS à haute résolution.
Mais par curiosité on serait content d’explorer cette ancienne piste, si ça te dit de nous rejoindre.
Cordialement
Julien
Répondre à ce message
# Le 6 février 2013 à 00:09, par naeco En réponse à : Balises radio (non abouti)
En réponse à : Balises radio (non abouti)
Bonjour,
Je trouve ce projet trés interessant, et j’en ai un similaire sans avoir trouvé de solution, donc je me dit qu’échanger nos idées pourrait être bien.
Il est dit dans un précédent commentaire que la puissance de l’emmeteur devrait être réduite quand le robot approcherait de celui ci : pourquoi ne pas utiliser 3 balises, a ce moment le robot, s’il est proche de l’une, il sera forcèment loin deux deux autres, en en faisant un premier calcul de position, il serait capable de faire un deuxième calcul en sachant quelle balise igniorer.
Mon "projet", s’il voit le jour un jour est :
Pour des bateaux radiocommandés en exterieur, sur une zone de 100 à 500 mètre carrés, pouvoir récupérer leurs positions. Cette position serait exoloitée pour pleins de choses.
J’ai envisagé :
– copie d’un radar LORAN les micros controleurs ne peuvent pas mesurer quelque chose de si petit au vu de la superficie
– infrarouge : trop d’imprecision semble t’il en extérieur, et puis les bateaux seraient affublés d’un capteur affreux, une antenne se cache mieux
– ultrasons : encore pire
– radiogoniometre : un peu comme ici
– effet Doppler : Semble trop soumis à erreur suivznt le temps etc...
– crentrale inertiele sur chaque bateau : trop cher
– recepteur GPS : trop cher(il faut équiper tous les bateaux du clubs !), pas fun, et pas forcément précis piur le grand public
– d’autres encore....
Moi j’ai plus besoin que la position soit connu sur la berge sur le bateau, j’envisageais de lettre l’emmeteur dans le bateaux.
Voilà un premier, qu’en pensez vous ? :)
Répondre à ce message
# Le 11 août 2010 à 15:59, par Stephan En réponse à : Balises radio
En réponse à : Balises radio
Bonjour,
j’ai quelques remarques sur cet articles :
– pour trouver la direction d’un signal radio, il est en général plus judicieux d’utiliser une antenne dipole et de rechercher le signal minimum obtenu et non le maximum. Le terme technique utilisé s’appelle rechercher "le nul de champ".
– sur faible distance, le problème rencontré sera lié au ondes indirectes réfléchie par les objets aux alentours, phénomène qui pourrait etre atténué en réduisant considérablement la puissance en emission, mais qui de par le fait nous placerait donc dans une situation ou notre signal serait couvert par toutes les ondes radio parasites présentes.
– Petite info en passant pour ceux qui souhaiteraient réaliser un dispositif de ce type, il faut savoir qu’au lieu de faire tourner l’antenne à la recherche de l’émetteur (avec un moteur pas à pas, par exemple), on peut utiliser plusieurs brins d’antennes disposés en cercle (6 en général) et l’on vient commuter certains de ces brins successivement à la masse ou à l’entrée reception, créant ainsi ce que l’on appelle un champ tournant.
Si des personnes sont intéressées, je peux donner de plus amples explications, dans la mesure de mes modestes souvenirs de radio amateur.
Stephan
# Le 12 août 2010 à 11:01, par Julien H. En réponse à : Balises radio
En réponse à : Balises radio
Merci pour ces infos, cela serait intéressant de faire une démo simple, avec un émetteur et un récepteur grand format (avec un buzzer pour entendre la variation du signal).
Répondre à ce message
# Le 10 août 2010 à 22:32, par Eirc En réponse à : Balises radio
En réponse à : Balises radio
La seule faiblesse de ce principe de repérage est qu’il fait totalement abstraction des perturbations que l’environnement peut générer dans la forme des lignes de champ.
Il suffit de la moindre masse métallique (l’armature interne d’un mur de béton, une voiture, le piètement métallique de la table de travail,...) pour que le champ vectoriel illustré sur l’image de principe ne soit plus vraiment un représentation de la réalité.
Répondre à ce message
# Le 8 août 2010 à 21:32, par MS En réponse à : Balises radio
En réponse à : Balises radio
Est-ce que tu pourrais expliquer un peu plus le principe s’il te plait ?
Je ne comprends pas vraiment comme l’onde fait une boucle.
Merci
# Le 9 août 2010 à 00:09, par Julien H. En réponse à : Balises radio
En réponse à : Balises radio
Bonne remarque, effectivement ce n’était pas clair. J’ai repris le texte et ajouté l’image complète d’une onde radio.
Répondre à ce message