 PoBot
PoBot
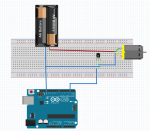
Etudiant à l’EIGSI, école d’ingénieurs généraliste, j’ai choisi pour projet de première année l’élaboration d’un montage ludique permettant de montrer simplement le fonctionnement d’un asservissement. Je reprends dans cet article toutes les étapes qui m’ont permis d’y arriver.
Accueil > Mots-clés > Mécanique > moteur
moteur
Un moteur est un des composants électro-mécaniques essentiels pour un robot mobile, car 99% de ces machines en ont besoin pour se déplacer. Bien sûr il existe différents types de moteurs utilisés en robotique, et certains peuvent également servir à interagir avec l’environnement (pinces, bras).
Articles
-
 Asservissement d’un moteur à courant continu
Asservissement d’un moteur à courant continu
8 octobre 2014, par Benoit T. -
 Construire une voiture télécommandée
Construire une voiture télécommandée
28 novembre 2015, par Pierre M.Une Arduino pilote une voiture télécommandée
-
 DFRduino RoMeo Rev1.1
DFRduino RoMeo Rev1.1
24 juin 2012, par Eric P., Julien H.Nous avions testé la RoMeo peu après sa sortie en 2008, et plusieurs de nos robots l’utilisent, comme le Tankobot, Baba, Roverduino.
Une nouvelle version est sortie en 2011, et nous découvrons ses fonctionnalités.
Attention, une version 2.0 est sortie en 2013, et elle est très différente.
La carte RoMeo est une adaptation pour le contrôle de moteurs à courant continu et le prototypage rapide de la célèbre Arduino. C’est un modèle désormais connu et répandu, car malgré ses plus grandes (…) -
 Moteur pas-à-pas 5 phases avec deux ponts L298
Moteur pas-à-pas 5 phases avec deux ponts L298
22 avril 2012, par Julien H.Nous avons récupéré des moteurs pas à pas à 5 fils. Voici un montage permettant de le contrôler avec deux circuits intégrés L298 (double demi-pont en H).
A première vue, rien de bien sorcier, car généralement un pas à pas à 5 fils est un moteur unipolaire double phases, avec un fil comme point milieu commun aux deux bobines, et un fil par extrémité de bobine.
Mais ici le cas est plus particulier, car il s’agit en fait de moteurs à 5 phases (soit 5 bobines). Les bobines sont connectées (…) -
 Mesure de couple au dynamomètre
Mesure de couple au dynamomètre
29 novembre 2009, par Julien H.Quand on a de la chance, et c’est fréquent, les moteurs sont surdimensionnés (ils fournissent plus de puissance que nécessaire) et il suffit de bien connecter l’électronique adaptée à ce moteur pour arriver à faire fonctionner notre robot comme on le souhaite.
Mais parfois on atteint les limites de fonctionnement : vitesse maximum trop faible par rapport à ce qu’on souhaite, glissements trop fréquents montrant un couple moteur trop faible par rapport au poids du robot, etc... Pour savoir (…) -
 Les moteurs pas-à-pas
Les moteurs pas-à-pas
26 août 2010, par KeurondeQu’est-ce qu’un moteur pas à pas ? Comment le piloter ? Découverte des principes généraux
Les moteurs pas-à-pas sont disponibles assez facilement dans les magasins d’électroniques, à faible prix. Ces modèles courants sont des moteurs à aimant permanent. Ce sont ceux dont nous parlerons dans cet article.
Retrouvez une rubrique complète sur les contrôleurs de moteurs
Moteurs unipolaires et bipolaires
Les moteurs pas-à-pas à aimant permanent courant sont bi-phases : ils sont constitués (…) -
 Projet Barjallo : comment contrôler un moteur à courant continu ?
Projet Barjallo : comment contrôler un moteur à courant continu ?
16 mars 2014, par Frédéric R., Jean B.Cet article présente le projet "Barjallo" consacré aux ponts en H et au fonctionnement du transistor
-
 Monte-charge du robot 2011
Monte-charge du robot 2011
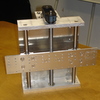
3 octobre 2011, par StephanLe monte-charge est un actionneur spécifique du robot PoBot 2011 répondant à un besoin du règlement Eurobot : empiler des pions les uns sur les autres. Mais il faisait bien plus que ça comme vous allez pouvoir le constater.
Il est composé d’un châssis en échelle sur lequel coulisse une plaque de fixation verticale mise en mouvement linéaire par une vis sans fin.
Massif, il s’intégrait parfaitement dans le châssis :
La vis trapézoïdale
Contrairement à une poulie, la vis à pas (…) -
 Le Tankobot (2012)
Le Tankobot (2012)
19 mai 2012, par Julien H.Ce robot permet de faire des tests rapides d’algorithmes. Il a été conçu pour être très pratique et pouvoir servir à de nombreux ateliers. Il est donc robuste et simple.
Basé sur un châssis RP-5 offert par Zartronic, le Tankobot est un robot d’études mis au point grâce aux participants des ateliers hebdomadaires de l’association Pobot.
En 2013, il a été équipé d’une tourelle à 3 capteurs ultrasons. Mécanique
Les deux chenilles du robot sont mises en mouvement par deux moteurs à (…) -
 Fabrication des pieds de R2-D2
Fabrication des pieds de R2-D2
12 août 2012, par Jean-Pierre, Julien H.Cet article présente la fabrication de la coque qui recouvre chacun des trois pieds, mais aussi des plates-formes intérieures qui soutiennent les roues et les moteurs. Il présente des astuces mécaniques qui nécessitent des connaissances en robotique, notamment les contraintes de poids, de couple et de vitesse et leurs effets sur les frottements et les glissements.
La coque
Le moule a été réalisé en polystyrène extrudé (disponible en grande surface de bricolage par couches de 6 (…)
