 PoBot
PoBot
 DFRduino RoMeo Rev1.1
DFRduino RoMeo Rev1.1La carte RoMeo est une adaptation pour le contrôle de moteurs à courant continu et le prototypage rapide de la célèbre Arduino. C’est un modèle désormais connu et répandu, car malgré ses plus grandes dimensions, les différentes améliorations de cette révision 1.1 sont vraiment pratiques.
Hormis l’usage régulier pour nos ateliers, la carte se révèle également très pratique pour une intégration dans nos robots. En effet, le Tankobot tout comme Baba ou Roverduino, deux robots à roues de nos adhérents, en est équipé, car même si toutes les fonctions (boutons, connecteur pour radio APC220) ne sont pas utilisées une fois la carte enfermée dans un châssis, il est plus simple de la conserver que de développer une extension ("shield") dédiée.
Description
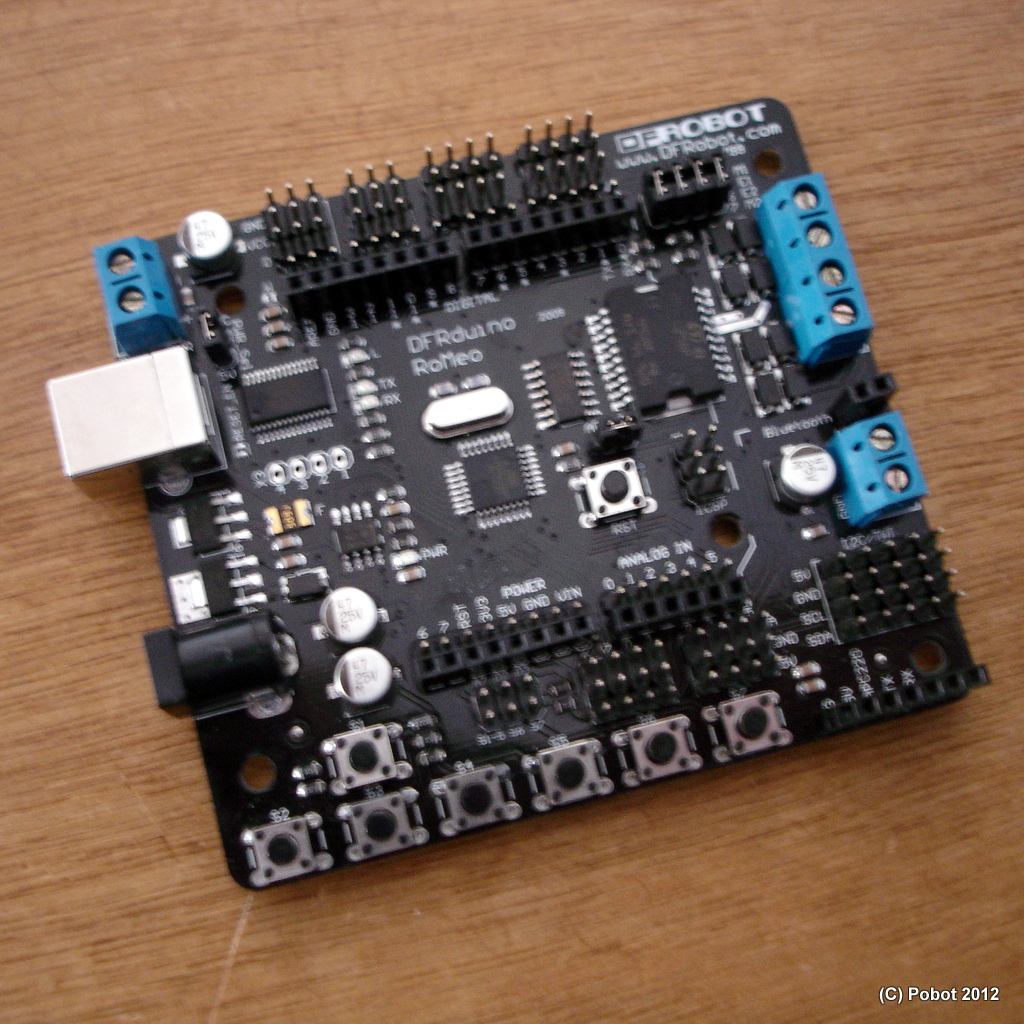
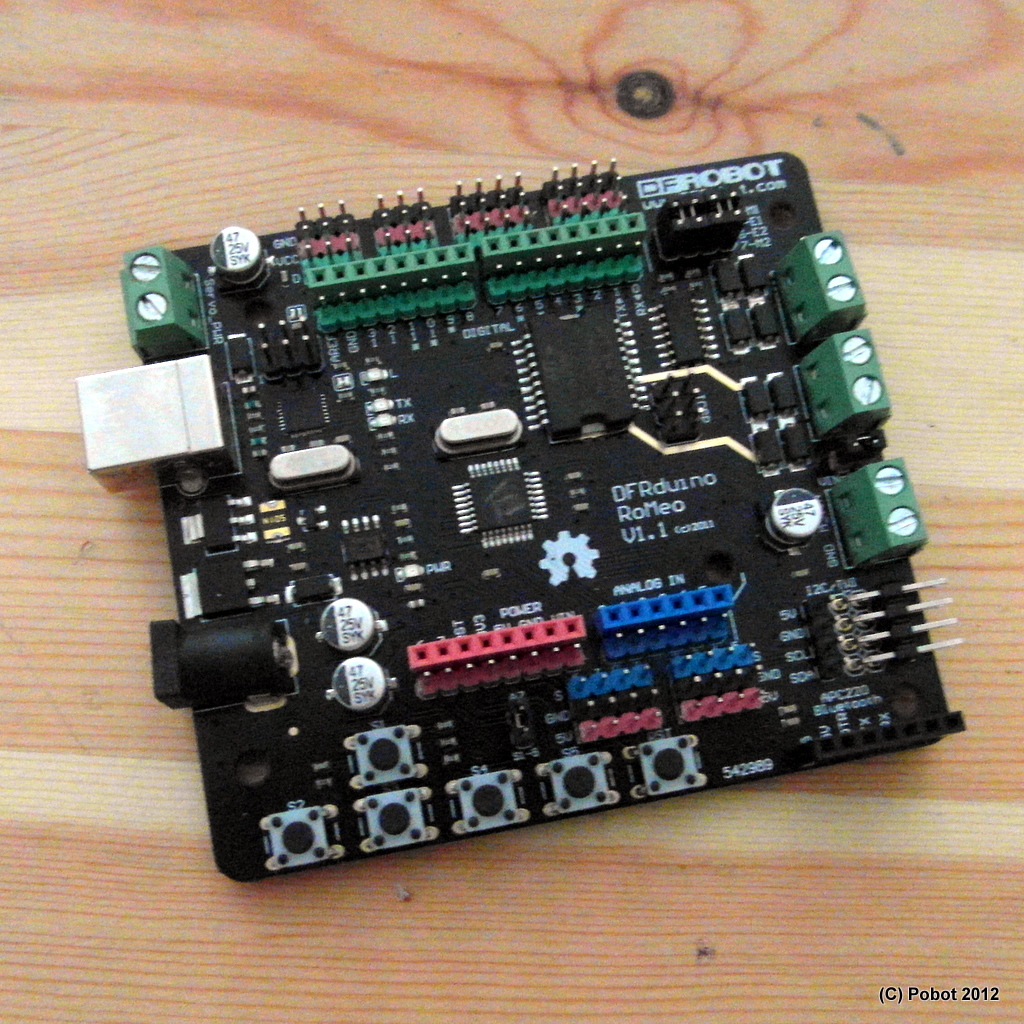
Voici une comparaison des deux versions, celle présentée dans cet article et la nouvelle reçue vendredi dernier :
| 
|
Cette fois-ci, la carte intègre le petit Atmel USB pour la gestion de la communication série, en remplacement de la puce FTDI, comme l’Arduino Uno qu’elle réplique (donc qu’il faut sélectionner lors de la programmation).
Elle est disponible pour 32 euros auprès de Zartronic, avec tous les avantages pour les adhérents de l’association.
A noter les couleurs pour les connecteurs : très intéressant pour les débutants car on a observé lors de nos ateliers qu’il était fréquent d’inverser la masse et le signal pour les entrées numériques, et qu’on peut oublier que les connecteurs 3 points côté entrées analogiques n’ont pas la tension 5V au milieu comme sur un connecteur servo mais sur le côté pour être compatibles avec différents connecteurs de capteurs de la même marque.
La carte est désormais livrée dans une boîte en carton (orange, pas bleu), signe que la société chinoise DFRobot souhaite soigner la présentation comme le fait Arduino Italy.
On notera également la présence du logo Open Source Hardware (OSHW), malgré la polémique ou le flou concernant les conséquences de ce choix : est-ce que les schémas seuls suffisent à respecter la filiation avec Arduino, ou bien les fichiers de construction (PCB, Gerber) sont-ils obligatoires ?
Utilisation
Dans le logiciel Arduino (version récente), il faut sélectionner la carte (ou board) Uno pour être compatible avec cette nouvelle version.
Quelques petites précisions concernant des évolutions moins visibles
Dans l’article de présentation de la version précédente, une remarque mentionnait un risque pour le PC lorsque la connexion USB et l’alimentation des servos étaient utilisées simultanément. Ce risque n’existe plus car les différentes sources d’alimentation sont gérées de manière assez élaborée maintenant. Par commodité, nous utiliserons les notations suivantes :
| Notation | Description | Symbole sur le schéma électronique |
|---|---|---|
| Vin | tension appliquée sur le connecteur d’alimentation cylindrique | VIN |
| Vmot | tension appliquée sur le bornier d’alimentation des moteurs | M_IN |
| Vservo | tension appliquée sur le bornier d’alimentation des servos | EVCC |
| Vusb | 5V en provenance du câble USB | USBVCC |
| VCC | 5V interne de la carte, en sortie du régulateur | +5V |
Le schéma électronique de la carte est fourni dans le document suivant :

- Vin et Vmot sont connectés ensemble par un jumper qui permet de les dissocier
- Vservo et Vin sont reliées via une diode qui empêche le "retour de tension" Vservo vers Vin (D10 dans l’encadré supérieur gauche du schéma)
- Vusb et le 5V interne sont reliés par un système qui les déconnecte automatiquement en cas de présence de Vin (cf encadré inférieur gauche du schéma)
Dans la pratique, cela veut dire que :
- le remplacement du jumper de liaison Vservo et VCC de la V1.0 de la carte par une diode évite toute destruction en cas d’oubli de son retrait et de présence de Vservo avec une autre source pour VCC (Vin ou Vmot). Comme le décrit la documentation, la tension d’alimentation sur les connecteurs 3 points Dxx sera la plus élevée entre Vservo et 5V.
ATTENTION : cela peut présenter un risque en cas d’alimentation de périphériques par ces connecteurs, dans le cas où ils ne supportent pas plus de 5V. - il n’y a pas de problème à avoir simultanément le câble USB et une ou plusieurs autre sources d’alimentation car :
- Vusb et le 5V sont automatiquement séparés en cas de présence de Vin
- Vservo ne peut pas "remonter dans" le 5V
Vous voilà sans doute rassurés concernant cette profusion de sources d’alimentation.
Gardez donc bien à l’esprit le fait que les headers des ports Dxx peuvent être alimentés par Vservo, et vérifiez donc à l’avance si ce que vous y connectez supporte une tension supérieure à 5V. Si ce n’est pas le cas, il faudra réaliser un adaptateur approprié qui ira récupérer le 5V ailleurs, au sacrifice du côté pratique des connecteurs 3 points.




