 PoBot
PoBot
 Projet Barjallo : comment contrôler un moteur à courant continu ?
Projet Barjallo : comment contrôler un moteur à courant continu ?Cet article présente les explications et la démarche d’une situation que l’on peut rencontrer fréquemment quand on débute la robotique ludique à des fins pédagogiques, c’est-à-dire qu’on souhaite piloter un moteur mais en comprenant ce que l’on fait, sans recourir à un contrôleur électronique intégré (ESC).
Genèse du projet
– Mais quel est le principe ?
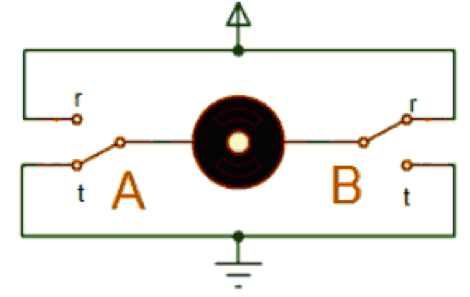
– Regarde, c’est fort simple :
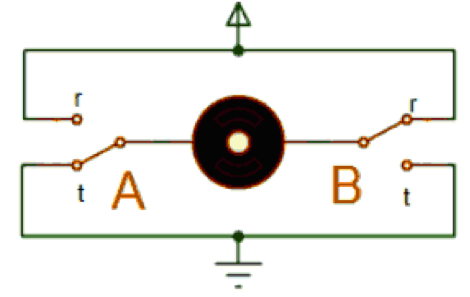
Tu vois, lorsque l’interrupteur B ferme (position t) le circuit en bas, il ouvre également le circuit du haut (position r). Du coup, le pôle + devient un pôle - pour ce côté du moteur.
En faisant de même avec l’interrupteur A on crée un circuit électrique fermé dont on contrôle le sens de rotation de ton moteur selon les positions de 2 interrupteurs !
Première étape : relais et transistors
– Super Jean ! C’est exactement ce dont j’ai besoin…. Mais au fait où je trouve des interrupteurs comme ça ?
– Je pense qu’il te faut des relais. Mais, si tu veux faire les choses bien, il te faudra envoyer juste le courant nécessaire aux bobines du relais…
– OK, comment fait-on ?
– Tu peux commander ces relais par des transistors, regarde comment je fais.
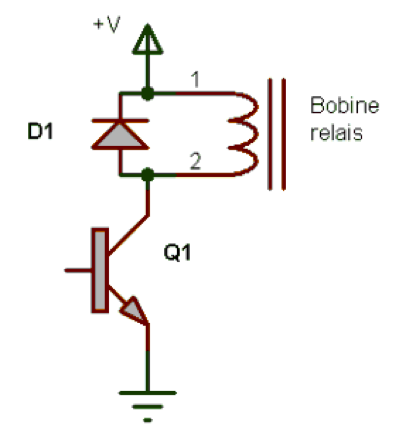
Lorsque le transistor reçoit un faible courant dans la base, il laisse passer juste le courant nécessaire pour alimenter la bobine du relais.
– Oui mais pourquoi tu mets une diode ?
– Oh là ! Mon cher Fred, tu ne te souviens pas de la Loi de Lenz ? : « si un circuit fermé est soumis à un champ magnétique inducteur, ce circuit va s’opposer à toute variation de ce flux ». Donc la bobine devient génératrice lorsqu’on ouvre le circuit.
– Je comprends ! Lorsque l’on coupe l’alimentation de la bobine, celle-ci réagit ; elle va générer un courant (dans le sens inverse) qui va avoir tendance à perturber le système
– Exactement, et grâce à cette diode, on s’assure que ce courant ne passe pas au travers du transistor
Table de vérité du pont en H
– OK pour les transistors qui alimenteront les relais Jean, mais pouvons-nous revenir un peu sur le fonctionnement général du pont en H ?
– Mon cher Fred, pour être plus complet, je te propose d’étudier cette « table de vérité ».
Il y a donc 2 relais (interrupteurs A et B) qui ont chacun 2 positions : r (repos) et t (travail). Lorsque les 2 relais sont sur la même position (t ou r), il n’y a pas de différence de potentiel donc le moteur ne tourne pas !
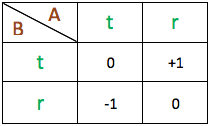
- 0 : pas d’action
- +1 : rotation dans le sens des aiguilles d’une montre
- -1 : rotation dans le sens inverse
Pour que le moteur tourne, il faut que les positions des relais A et B soient opposées.
Si A est en t et B est en r alors B est sur + et A est sur -. Le moteur tourne dans le sens des aiguilles d’une montre.
Schémas complets du montage
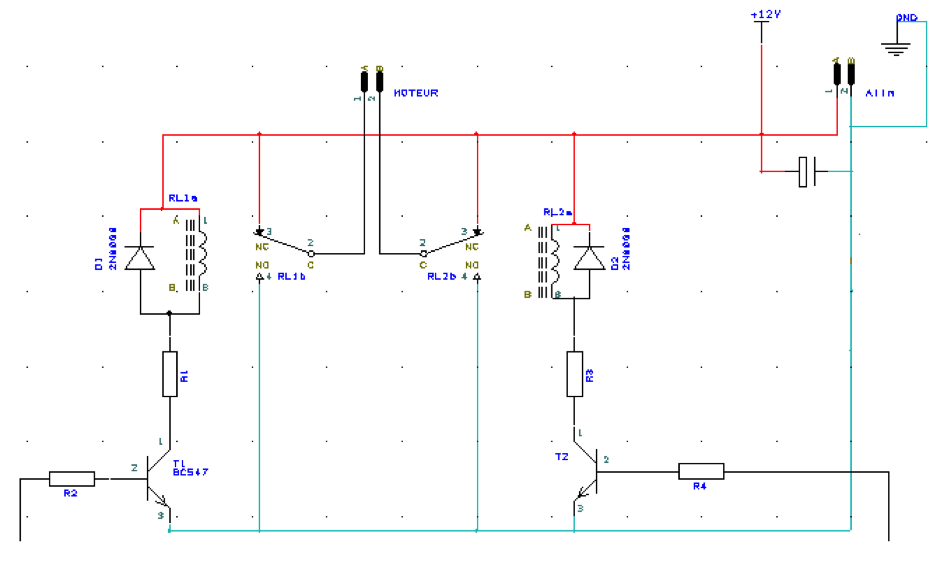
– Regarde Jean, je fais un beau schéma !
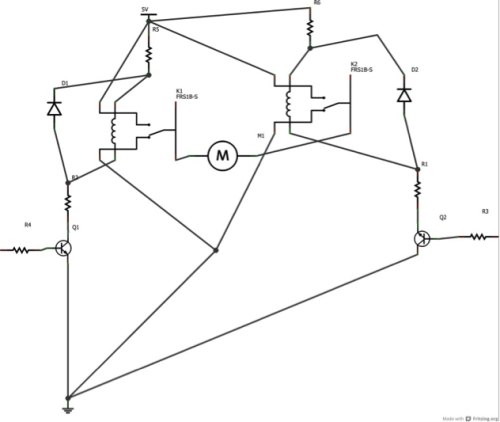
J’ai utilisé :
– 6 résistances
– 2 transistors
– 2 relais
– 2 diodes
– Fred, c’est un bon début mais maintenant, il va falloir que tu installes un environnement de travail qui te permette de faire de plus jolis schémas.
Lien vers DesignSpark
Second schéma
– Jean, il est super ton programme (gratuit). Regarde à quoi ressemble mon schéma maintenant
– Très bien Fred ! Mais on peut encore l’améliorer. En effet, tes deux transistors, tu peux à présent les contrôler avec un microcontrôleur PIC (ou une Arduino).
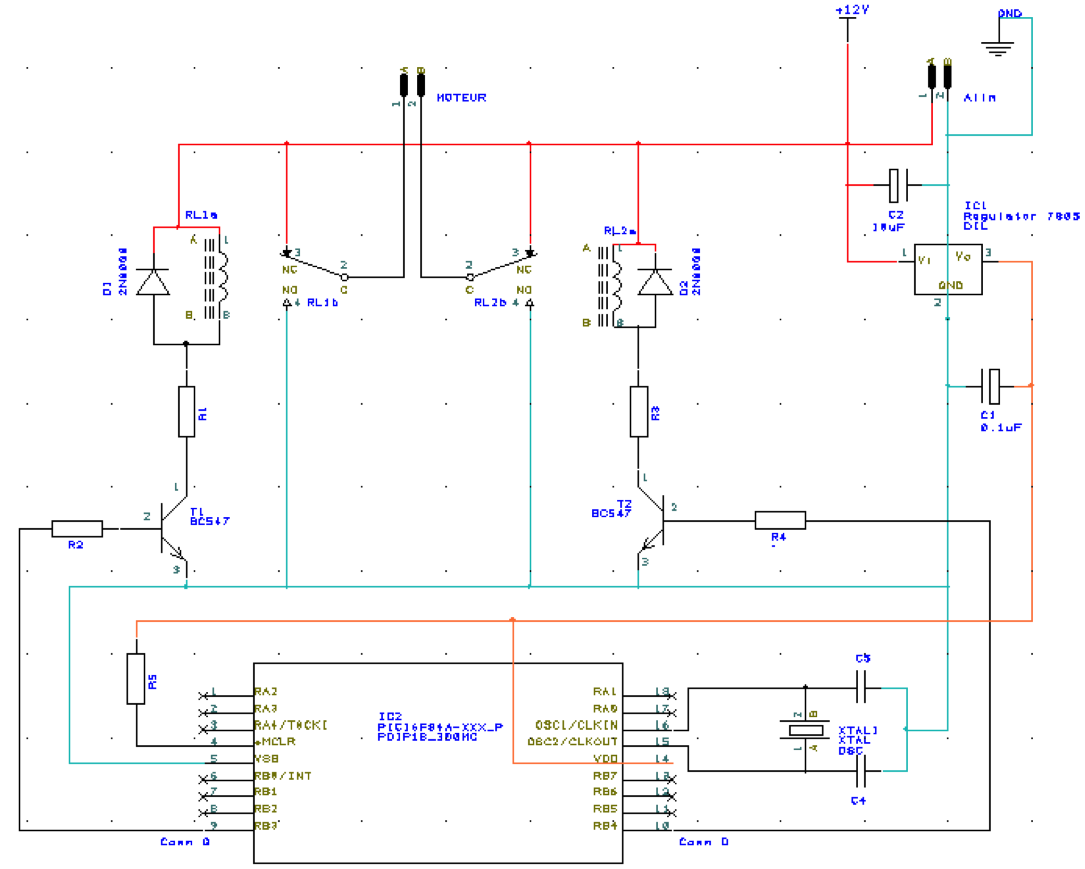
J’ai rajouté un PIC 16F84 (accompagné de sa résistance pour le CLR Memory et de son horloge).
– Super Jean ! mais comment as-tu choisi les capacités des condensateurs « ballasts » ?
– C’est l’expérience, mon vieux ! pour 5V tu mets un 0,1 µF et pour 12V tu mets un 10 µF (rapport 100).
– OK Jean, et pourquoi tu as choisi des transistors « BC 547 » ?
– Simplement parce que je les connais bien, que je dispose du datasheet et que je sais l’utiliser !
Calcul des résistances de base et de collecteur
– Fred, voici comment faire calculer les valeurs des transistors et des résistances
- Mesurer empiriquement la tension minimum qui fait coller le relais : je trouve 2,5V
- Mesurer la résistance de la bobine du relais : je trouve 160 ohms
- Déduire Ic = Rbob / V : je trouve 2,5/160 = 16mA
- Ajouter environ 20% à Ic pour être sûr de faire coller le relais : je trouve 19mA
Dans le schéma de réseau du transistor, le cadran 2 montre les courbes (fonction de Vce), obtenues pour différentes valeurs du courant de base. Par interpolation, on peut considérer que la courbe correspondant à la valeur Ic=20mA en ordonnée correspond à un courant de base Ib=110µA.
Ensuite, placer Ib en abscisse négative dans le cadran 4. Projeter ce point sur le point de repos entrée R, projeté de Ib qui coupe la courbe d’entrée (en bas à gauche, cadran 4). Placer Vbe=12V (tension choisie pour le circuit) en ordonnée (vers le bas) (cadran 4). Tracer la droite d’attaque d qui passe par Vbe et R = 0.110 mA.
La droite d’attaque représente l’expression de la loi d’ohm dans la boucle d’entrée Emetteur-Base (on admet tension Base-Emetteur = 0,6V) : 12v = 0,6V + Rb x 110.10-6
Déduire Rb = (12-0,6)/ (110.10-6) = 11,4/0,000110 ⇒ j’arrondis et je trouve Rb = 100 Kohms, Jean !
On sait que Vce= 1V (toujours le cas avec les transistors en commutation) donc Vc = Valim – Vce = 11V. Or Vc = Ic x (Rc+Rbob) = 11V donc (Rc+Rbob)=11/0.020 = 550ohms soit Rc = 550 – Rbob = 390ohms.

Réalisation pratique
– Fred, à présent on peut fabriquer le PCB (circuit électronique)
– Super Jean, je prends une plaque pré-perforée et je soude les composants à leur place
– Très bien Frédéric, mais applique-toi maintenant pour faire de belles soudures pour les liaisons (sans te tromper)
– Je vais essayer Jean
Programmation du PIC
– Fred, pendant que tu soudais tout cela, j’ai programmé le PIC pour qu’il nous fasse un test : Il tourne dans un sens pendant 2 secondes, puis il s’arrête pendant 0,5 seconde et tourne dans l’autre sens pendant 1 seconde.
– Comment tu as fait ce programme, Jean ?
– On en reparlera le temps venu, Fred…
Résultat
– Super Jean, tout fonctionne !





Vos commentaires
# Le 25 mars 2014 à 19:43, par Mbombo Douglas En réponse à : Projet Barjallo : comment contrôler un moteur à courant continu ?
En réponse à : Projet Barjallo : comment contrôler un moteur à courant continu ?
Je suis très malheureux, j’ai aimé apprendre ces histoires, les microtechnologie depuis mon enfance. je n’ai jamais eu la chance de le faire. Je serai très heureux d’avoir la chance d’apprendre. Je demande de l’aide.
Répondre à ce message