 PoBot
PoBot
 xPO : le retour (2007)
xPO : le retour (2007)Comme tout le monde, lors de la création du club, j’avais moi aussi construit mon xPO. Malheureusement, pris par d’autres occupations, il n’avait jamais servi à grand’chose.
Récemment, Patrick ayant reçu des modules de commande de moteurs pas à pas pour fabriquer une machine à commande numérique (c’est devenu sa spécialité, et il est très fort à ce jeu là), il me les a prêtés pour faire des essais en matière de propulsion de robot.
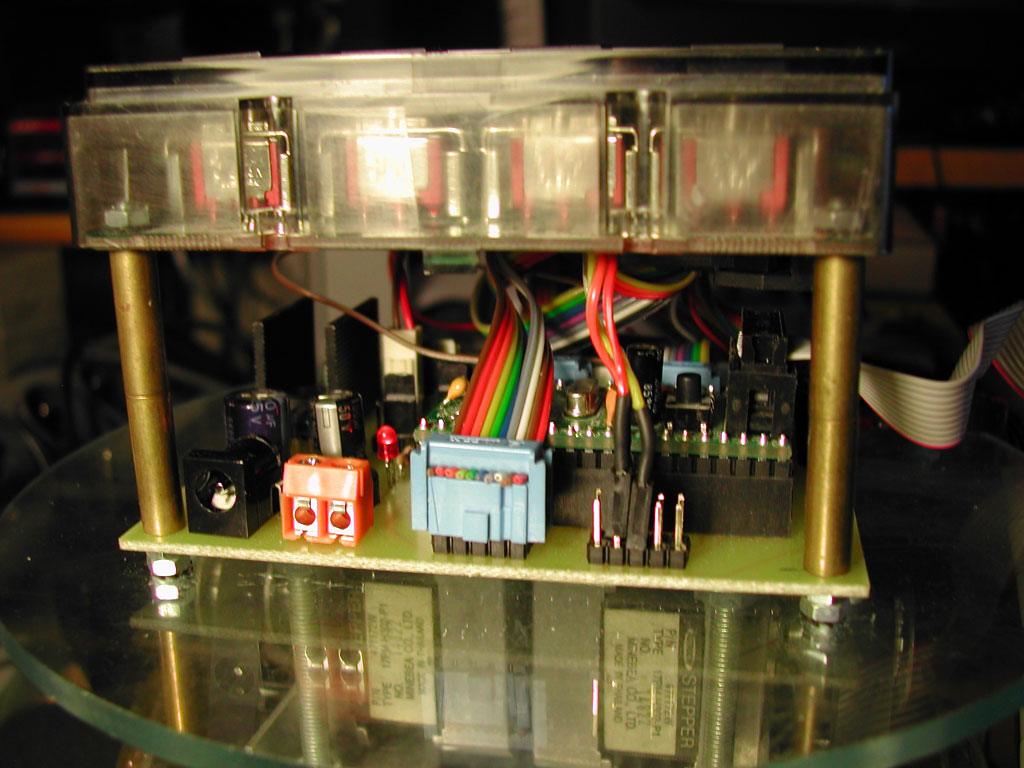
Ces modules sont distribués par la société néerlandaise Stappenmotor, et il s’agit du modèle MSD-32-2.5. Comme indiqué dans la documentation, ces modules présentent les caractéristiques suivantes :
– pilotage par 3 signaux : clock, enable, direction
– capable de faire du full-step, half-step et micro-step (1/4 et 1/8)
– limitation automatique du courant (réglable) jusqu’à 2.5A
– alimentation jusqu’à 30V
– totale isolation galvanique des signaux de commande par opto-couplage
Pour info, la commande en micro-step fait passer le champ magnétique graduellement d’une bobine à l’autre, et non pas brutalement comme la commande en full-step. Le half-step est le premier niveau de micro-step, mais en se contentant de diviser la transition en 2 parties seulement.
Pour piloter les bestiaux, on va ressortir le module MR163 de chez Lextronic, qui héberge un ATMega 163 CMS et ses composants de servitude, monté sur la mini CNP décrite dans un autre article.
Ayant par ailleurs récupéré sur un jukebox de sauvegarde hors service un panneau de contrôle, on va en profiter pour le greffer sur le xPO. Ainsi, on bénéficiera d’un superbe tableau de bord équipé comme suit :
– écran LCD 4x20
– 4 LEDs de signalisation haute luminosité
– 4 boutons poussoirs.
Voici quelques vues du résultat :
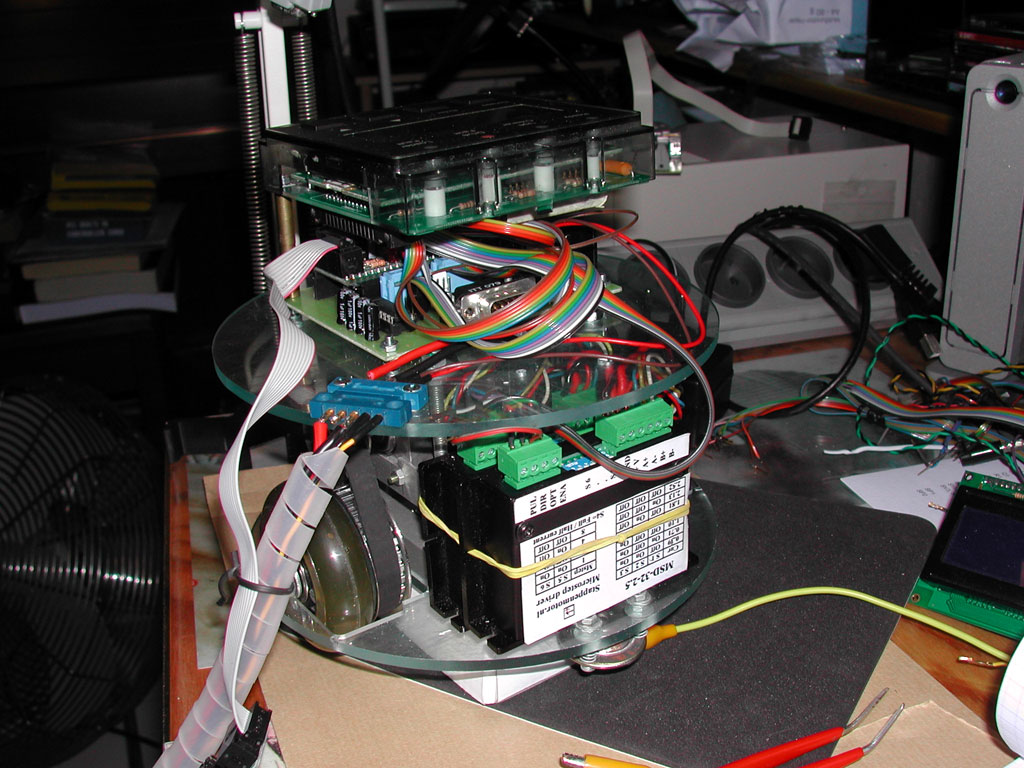
On distingue les deux modules, debout entre les deux ponts du robot, avec leur étiquette blanche rappelant les diverses combinaisons des micro-switches de configuration.
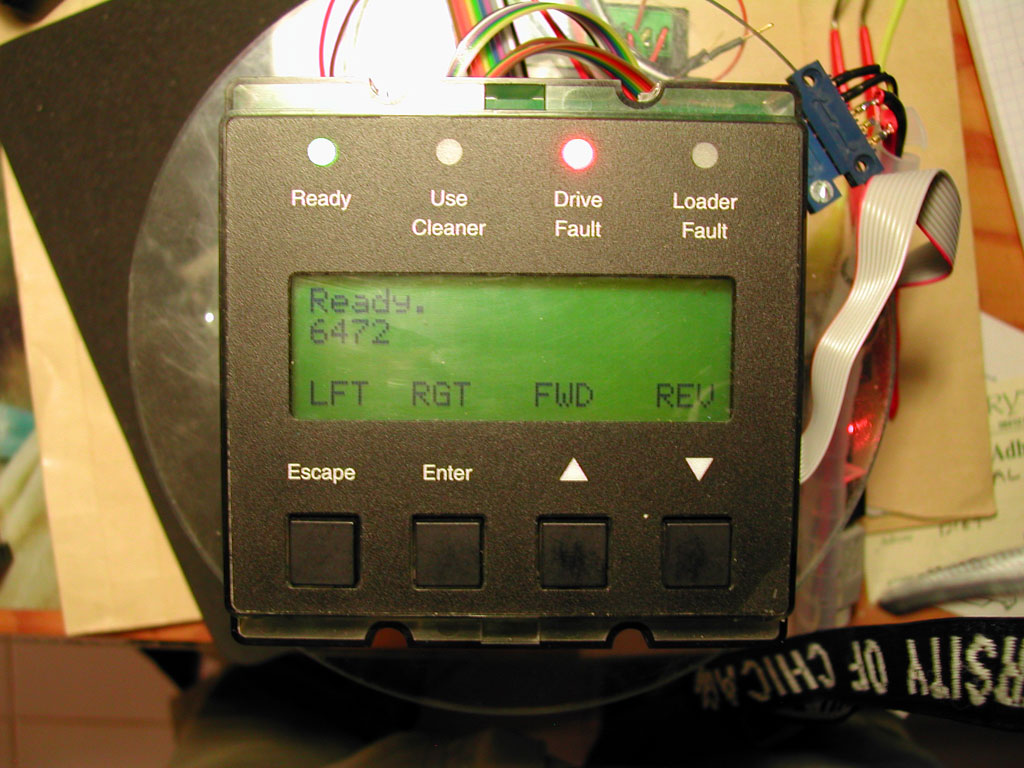
Un gros plan sur le panneau de contrôle hi-tech.
La carte CPU, avec son module MR163, se glisse entre le panneau de contrôle et le pont supérieur.
A noter que pour l’instant j’utilise une alimentation de labo externe pour les 24V destinés aux moteurs. Ceux-ci sont donnés pour une tension nominale de 9V je crois, mais on sen moque, car on va les commander en courant constant grâce à la limitation gérée par le module. Cette tension confortable permet d’accéder à des vitesses de rotation plus élevées, puisqu’on réduit de ce fait le temps d’établissement du courant dans les bobines des moteurs.
Gràce à la commande en micro-pas, à la tension moteur supérieure et à un réglage correct des accélérations, on arrive à des vitesses de déplacement jamais atteintes sur ce modèle de robot, comme on peut le voir sur la vidéo ci-dessous (réalisée sans trucage) :
Il n’y a pas le son malheureusement, mais du fait de l’utilisation des micro-steps, les moteurs ne font plus l’infâme boucan, conséquence de la commande bestiale que réalisaient les cartes à base de L298, mais un sifflement suave du plus bel effet.




