 PoBot
PoBot
 Protocoles de communication sur R2-D2
Protocoles de communication sur R2-D2Les différentes parties du logiciel du robot (voir l’article sur les principes d’architecture) communiquent grâce à un réseau de câbles transportant les informations d’une puce à l’autre.
Certaines puces sont programmables et gèrent plusieurs protocoles. D’autres sont des circuits intégrés qui fournissent un service (lecture d’un capteur, affichage, contrôle de puissance électrique) en fonction d’ordres reçus dans un protocole prédéfini.
Pour faire fonctionner cet ensemble, il faut faire des choix de protocoles et ajouter des cartes de conversion quand c’est nécessaire.
On peut également choisir des interfaces qui modifieront les informations pour diminuer la quantité de données à gérer : par exemple comparer tous les capteurs de proximité pour ne fournir qu’une indication d’obstacles ou une direction d’échappement (espace vide).
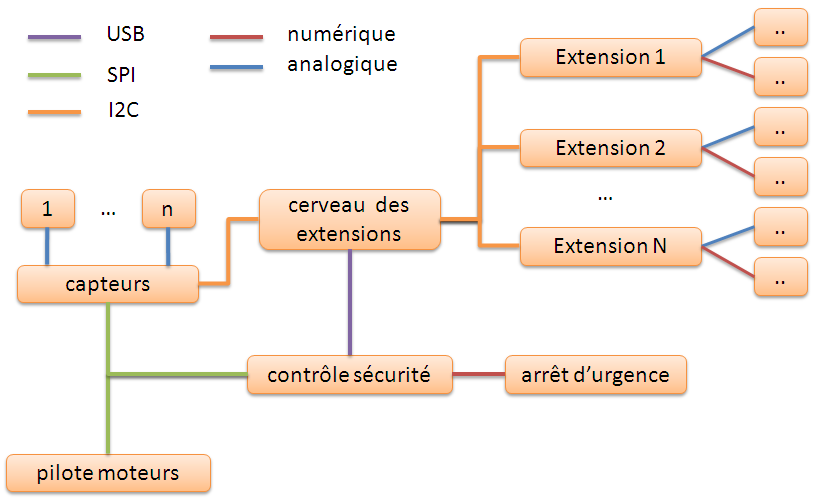
Afin de permettre à chacun de participer au projet, tout en gardant une vision d’ensemble, ce schéma propose l’ensemble des équipements prévus sur le droïde et les protocoles utilisés.




