 PoBot
PoBot
 Localisation d’un robot par Wiimote
Localisation d’un robot par WiimoteNous connaissons déjà la caméra infra-rouge équipant la Wiimote : elle permet de recevoir directement les coordonnées des 4 points les plus brillants.
On peut l’utiliser pour localiser un robot, avec deux variantes :
- la caméra (Wiimote complète ou démontée) est sur le robot
- la caméra est fixe et observe le robot depuis l’extérieur
Caméra embarquée sur le robot
La première solution nous semble la plus judicieuse, surtout si on fixe des lumières (spots peu diffus par exemple) sur un plafond : on a alors un référentiel fixe, et l’alignement est direct et reproduit le système initialement fixé sur le téléviseur pour une utilisation standard de la console de jeux vidéo Wii.
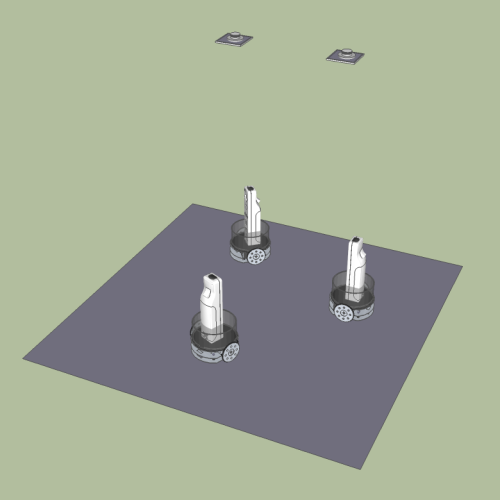
Surtout ce système permet d’utiliser plusieurs robots en même temps, chacun étant autonome et nécessitant peu de ressources (dans le cas d’un démontage pour extraire le module I2C de la caméra).
Wiimote fixe regardant le terrain
La seconde solution est un peu plus particulière : on fixe la Wiimote de manière à observer le robot, qui est équipé de spots. La Wiimote étant équipée de Bluetooth, elle peut envoyer les coordonnées au robot (qui doit donc être pourvu d’un récepteur Bluetooth).
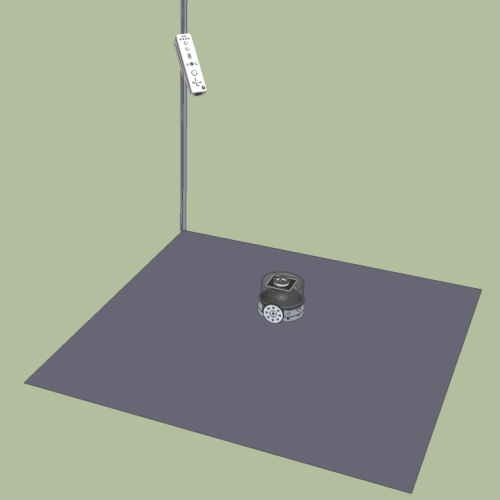
Dans cette situation, l’image du sol est déformée et les coordonnées des points lumineux doivent être transformées avec un peu de mathématiques, en particulier une matrice homographiques.
Cette solution a été théorisée et expliquée par des chercheurs de l’université privée Yuan Ze de Taoyuan, Taïwan. Vous y trouverez les explications mathématiques et une mise en œuvre pratique sur un robot aspirateur.

Department of Computer Science and Engineering
Yuan Ze University
Troisième voie
La solution 2 avait été présentée par Marc pour le projet de course de robots "Poursuite Infernale" il y a 2 ans. Il a depuis développé l’idée avec une combinaison des deux :
- caméra externe et Xbee pour la localisation exacte du robot dans le référentiel du terrain, comme si c’était le support d’un satellite.
- caméra à bord pour résoudre les problèmes d’obstacles à analyser et la topographie découverte par le robot.
Ce sont 2 problèmes différents résolus par la maitrise de la même technologie.
Mise en oeuvre pratique
Nous n’avons pas encore réalisé la première solution, bien que nous l’ayons imaginée dès la construction du Pobot Easy, pour une utilisation dans le cadre d’un concours que nous organisons (Jeux de Sophia).
Cependant de plus en plus de personnes s’y intéressent, et peut-être bientôt nous ferons la manip’, avec vous par exemple si vous venez assister à nos ateliers.
Voici la discussion qui a relancé ce sujet :




