 PoBot
PoBot
Un robot mobile autonome peut servir à explorer un endroit où on ne se trouve pas. Pour l’acquisition d’images comme pour la transmission à distance, des solutions à bas-coût sont possibles grâce à une simple webcam de chat (15€) et une carte Raspberry Pi (35€ + câbles et carte mémoire).
C’est la solution qu’a choisi Greg pour la mise à jour 1.1 de son robot Baba.
Configuration requise
La manip’ présentée ici est effectuée avec une Raspberry Pi type B seconde version avec 256 Mo de (…)
Accueil > Mots-clés > Composants > caméra
caméra
Plusieurs dispositifs existent pour doter un robot d’un système de vision, regroupés sous l’appellation de caméra.
On peut ainsi citer la webcam mais il existe des systèmes optiques qui contiennent des algorithmes de détection : CMUCAM, Pob-Eye par exemple. Certains dispositifs sont vus comme des caméras, alors qu’ils sont bien plus complexes, comme le capteur RGB-D du Microsoft Kinect
Nous utilisons plusieurs caméras selon les besoins : avec nos propres algorithmes de traitement d’images ou en réutilisant des bibliothèques de code.
Articles
-
 Vision par webcam avec une Raspberry Pi
Vision par webcam avec une Raspberry Pi
9 novembre 2012, par Julien H. -
 Caméras et Arduino
Caméras et Arduino
20 mars 2011, par Julien H.On nous demande souvent si une Arduino peut "envoyer des informations" d’une caméra ou traiter les informations de deux caméras pour faire un algorithme de reconnaissance 3D ou bien d’autres traitements complexes de ce genre.
Préambule
Il faut rappeler qu’une Arduino est un micro-contrôleur (famille AVR) et qu’il existe des modèles de caméras pilotées par AVR. Donc rien d’infaisable. Mais il faut aussi dire qu’il y a différents types de caméra, donc la question nécessite un peu de (…) -
 CerBac, un robot Arduino (2009)
CerBac, un robot Arduino (2009)
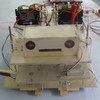
19 janvier 2011, par Sébastien CornerUn robot mobile autonome conçu et réalisé dans le cadre de mes études en robotique.
Le matériel utilisé est le suivant : moteurs pas-à-pas bipolaire à 200 pas par tour, en taille NEMA17. roues de roller, poulies et courroies crantées drivers de moteurs M325 de Soprolec carte électronique programmable Arduino Duemilanove caméra à détection de couleur et de forme Pob-Eye 2 du français Pob-Technology mécanique en aluminium et plexiglas, architecturé par des tiges filetées batteries Lithium (…) -
 Découverte d’OpenCV
Découverte d’OpenCV
16 décembre 2010, par Julien H.Un ensemble d’outils est apparu pour faciliter la reconnaissance d’images en mouvement et raccourcir le temps de développement entre le concept et sa réalisation : c’est Open Computer Vision ou simplement OpenCV.
Cette bibliothèque d’exécutables et de codes sources (C et C++ avec des ponts vers d’autres langages) propose différents algorithmes utilisables tels quels (détection de formes, de couleurs, isolation et poursuite d’objets).
Site officiel d’OpenCV (SourceForge redirigé vers (…) -
 Caméra IR avec une Wiimote
Caméra IR avec une Wiimote
21 février 2009, par Julien H.La Wiimote (pour Wii Remote) est une télécommande pour la console de jeu Nintendo ’Wii’ dont vous avez peut être déjà entendu parler.
Ses caractéristiques sont : des boutons (normal pour une télécommande) un accéléromètre 3 axes (c’est déjà moins commun) un port d’extension I2C (là, ça se rapproche de notre domaine) une connexion Bluetooth (sympa !) une caméra infra-rouge de résolution 1024x768 (c’est ce qui nous intéresse ici)
L’idée est d’utiliser le module caméra pour repérer des (…) -
 Reconnaissance d’image avec une CMUcam 3 (2011)
Reconnaissance d’image avec une CMUcam 3 (2011)
27 août 2011, par KeurondeEn 2010, la CMUCam avait été utilisée pour détecter le rouge. L’algorithme nécessitait d’avoir un grand tableau et ne reconnaissait pas les formes creuses. Un reflet au milieu de la forme à détecter rendait les choses très compliquées.
-
 Caméra Havimo pour Arduino
Caméra Havimo pour Arduino
22 août 2013, par Julien H.Après plusieurs années à tester des caméras autonomes (type CMUcam), nous avions pris le parti d’utiliser des webcams sur des cartes embarquées sous GNU/Linux. Mais l’offre de petites caméras pilotées par micro-contrôleur a continué à grossir et nous étudions aujourd’hui grâce à Arobose le modèle Havimo 2.5 sous forme d’un shield Arduino.
La détection de couleur et de forme dans une image est une tâche complexe qui nécessite beaucoup de calculs. Un simple micro-contrôleur 8 bits aurait (…) -
 BaBa, un robot piloté par Bluetooth (2011)
BaBa, un robot piloté par Bluetooth (2011)
15 juillet 2012, par Grégory Fromain, Julien H.Ce robot est l’oeuvre de Greg, un adhérent de l’association qui nous a rejoint en 2011.
Baba signifie Bot Arduino Bluetooth Android.
Le robot intègre de nombreux kits : Arduino, plate-forme 4WD, échanges Bluetooth, capteurs ultra-son, tourelle pan-tilt... ce qui en fait une plate-forme d’étude très pratique.
Il a été présenté lors de nos ateliers, puis a servi à une démonstration de mathématiques lors de la présentation MathC2+ de l’INRIA.
Le code source du projet est mis à jour (…) -
 Gaston, hommage à Johnny Five (2012)
Gaston, hommage à Johnny Five (2012)
8 mai 2012, par Julien H.Marco a conçu et construit un robot appelé Gaston, reprenant quelques-uns des principes du robot de cinéma "Numéro 5" (Short Circuit) également connu sous le nom de "Johnny Five".
Étudiant à l’AFPA de Nice, il a fréquenté nos ateliers et assemblé plusieurs prototypes avant de trouver les bonnes pistes pour la mécanique de grande taille capable de déplacer le robot et de supporter son poids. La construction
Plusieurs versions ont été construites. D’abord la tête, avec des canettes de (…) -
 Son et image avec la Sony PS3 Eye
Son et image avec la Sony PS3 Eye
4 décembre 2012, par Julien H.On sait déjà connecter une webcam standard sur la Raspberry Pi (voir cet article). Mais il existe une petite caméra très intéressante pour cette carte, c’est l’accessoire de la console Sony Playstation, la Sony PS3 Eye.
Pourquoi intéressante ? Parce qu’elle est pourvue d’un microphone avec 4 sources en ligne ce qui permet de bénéficier de la suppression de l’écho et d’une bonne qualité mais qu’il serait très pratique d’utiliser pour un asservissement sur une source sonore si on pouvait y (…)
