 PoBot
PoBot
 Compte-rendu de la Fête de la Science 2008
Compte-rendu de la Fête de la Science 2008Voici le compte-rendu de notre semaine de la science. Faisant partie de la première "Navette des Sciences" organisée sur Sophia-Antipolis, nous avons reçu beaucoup de classes (primaires, collèges et lycées).
Lundi 17
Premier jour, c’est l’installation des démos. Pas de public mais quand même 3h30 bien remplies. Nous arrivons à partir de 14h par petits groupes, avec les coffres plein de matériel. On décharge tout dans la salle, et on fait un aller/retour pour chercher les terrains de la PJC qui serviront pour l’essentiel des démos.

Certains découvrent les lieux et sont surpris des dimensions : nous n’avons jamais eu de salle aussi grande pour la Fête de la Science, c’est formidable.
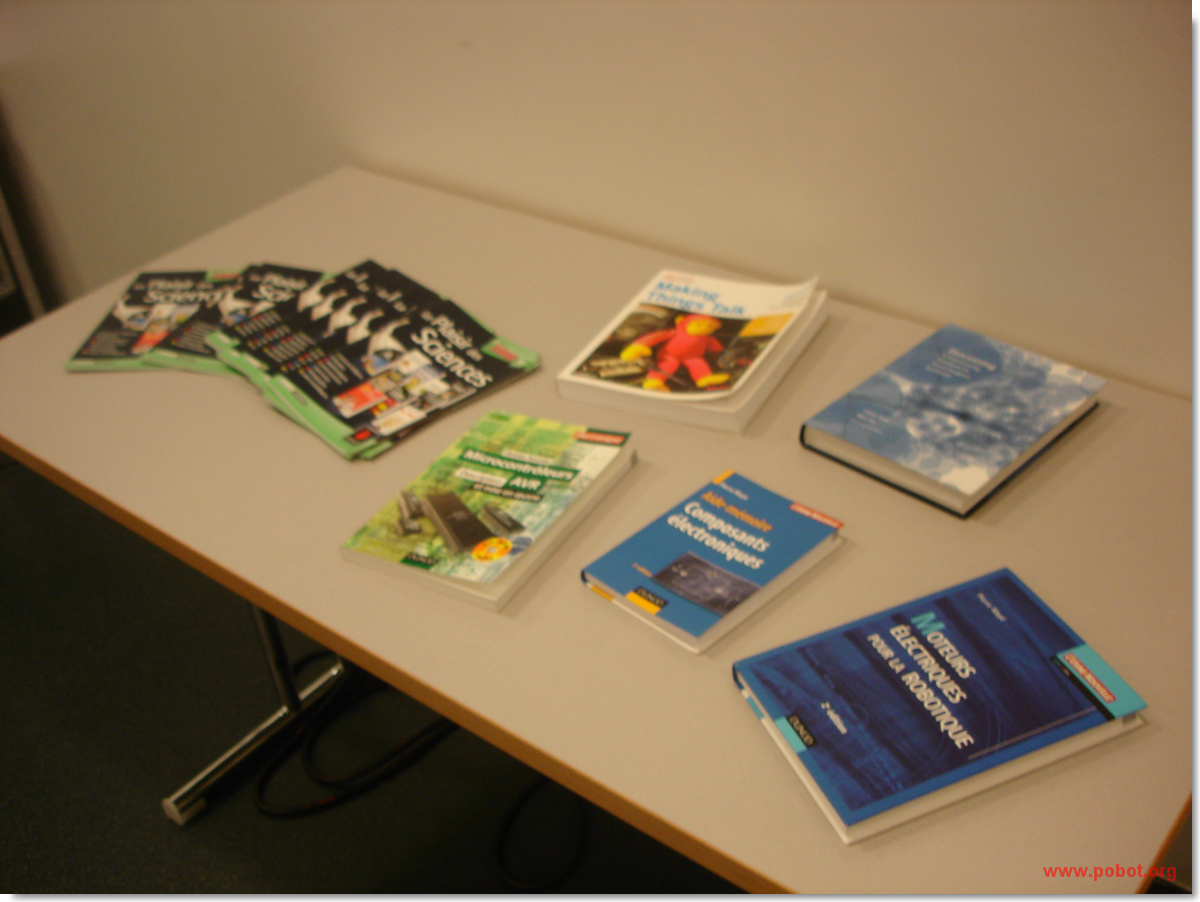
On se met au travail, il faut construire le radeau environnemental, préparer les livres (on les équipe d’un tag RFID pour éviter qu’ils soient empruntés à tord, nous sommes dans une médiathèque après tout), et peaufiner nos démonstrations.
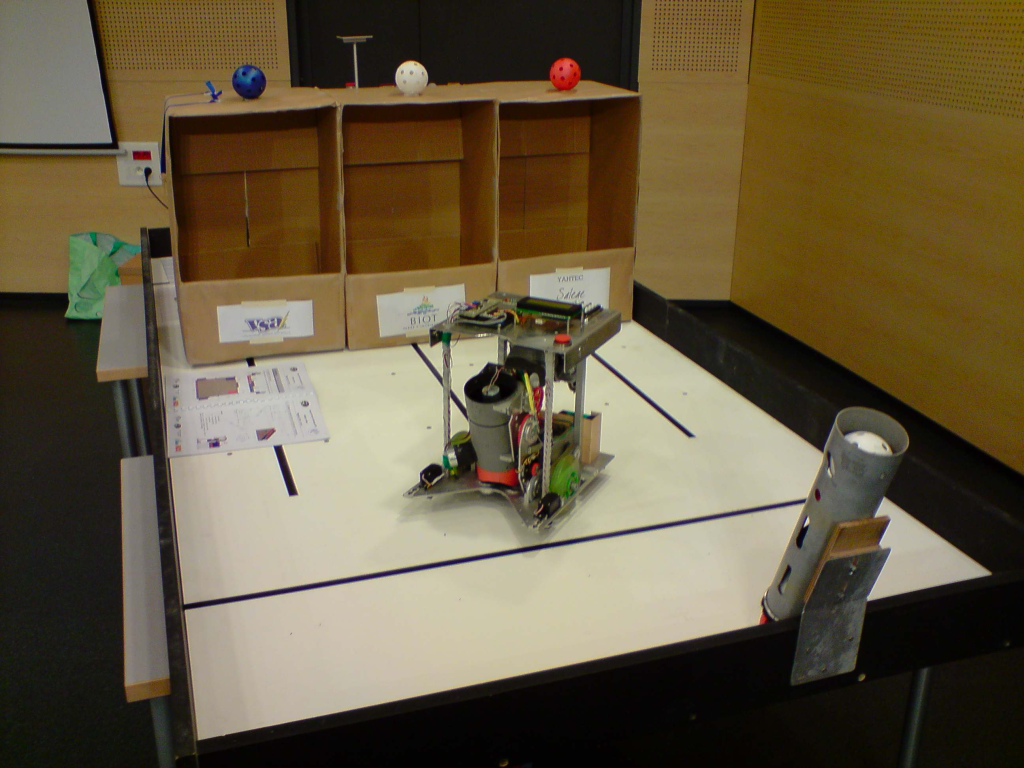
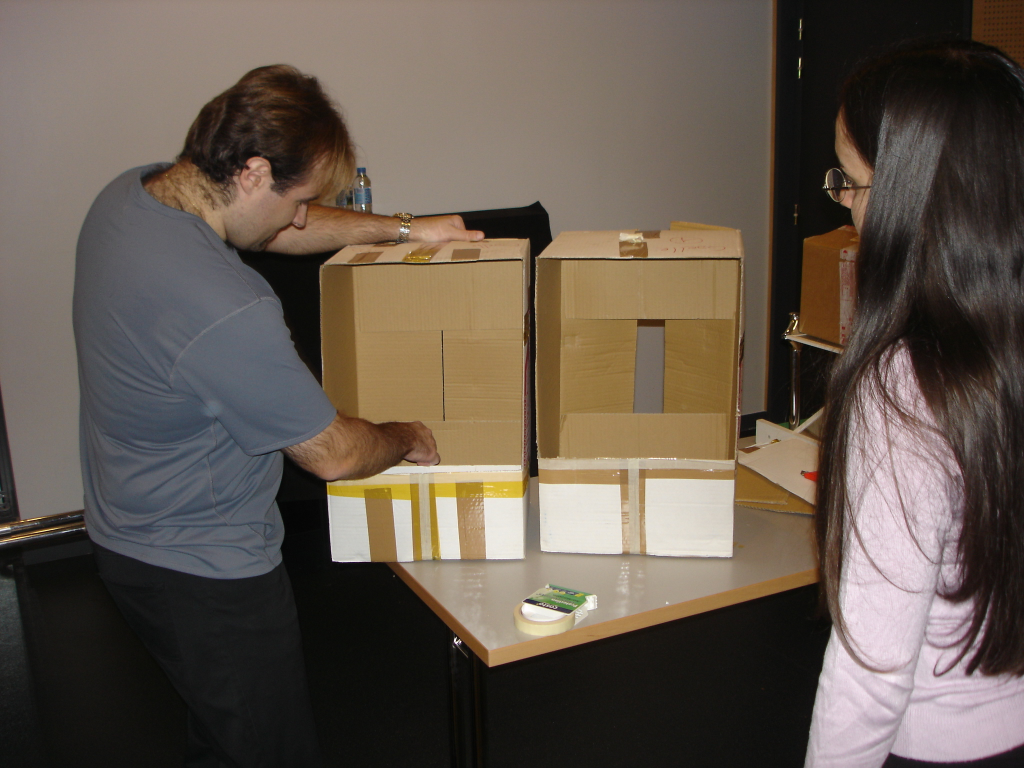
Grâce à Gaelle, nous avons des buts tout trouvés pour envoyer les balles de floorball pour notre démo du robot de la Coupe de France 2008 : 3 cartons identiques qu’il faut scotcher et habiller de papier craft.
À 17h, nous avons terminé l’installation des différents ateliers, il ne reste plus qu’à vérifier le niveau des batteries des robots et de préparer les documents à imprimer qu’on avait oublié de faire..
__3__
Mardi 18
C’est le grand jour, ouverture au public et premières classes qui se succèderont toute la journée.
Dès 8h45, on est sur place pour les réglages définitifs : hier, nous avons installé les terrains pour la démo des robots "Coupe E=m6", il est donc nécessaire d’adapter les angles de rotation pour viser les 3 cartons.
9h20 : problème sur le robot de la Coupe. Le repère géométrique de la Coupe de France accepte des valeurs négatives, alors que pour la démo de la Fête de la Science on a simplifié pour utiliser uniquement des valeurs positives pour toute la longueur. Brillante idée, sauf quand un code de "protection" (sic) vérifie que les coordonnées demandées à l’algorithme ne sont pas supérieures aux limites des coordonnées de la Coupe. Du coup, le robot essaie de se rendre en 0,0 (le milieu dans le repère Coupe mais le coin dans le repère Fête) au lieu de se rapprocher des buts.
Qu’à celà ne tienne, on va rapprocher les buts. Très bonne idée car cela coupe le terrain en deux et libère de la place pour une autre démo derrière. On peut recevoir le premier groupe d’élèves.
9h30 : les élèves de première d’un lycée de Nice arrivent. Ils ne sont pas nombreux, ce qui permet de donner des réponses détaillées à chacune de leurs réponses.
9h50 : second problème sur le robot de la Coupe. Il ne distingue plus les balles bleues des balles rouges, alors que ça a toujours fonctionné parfaitement... Pas de solution, mais cela permet d’expliquer l’intérêt de ce genre d’expérience : s’adapter aux contraintes du monde réel et ne pas considérer que ce qui est programmé va toujours se produire.
10h45 : on souffle un peu entre deux visites d’établissements.
Le rythme commence à être trouvé :
– d’abord les robots Ma-vin : simples et "sortis de la boite", ils permettent de comprendre les principes de la robotique mobile autonome sans risquer de problèmes de mécanique ou d’électronique.
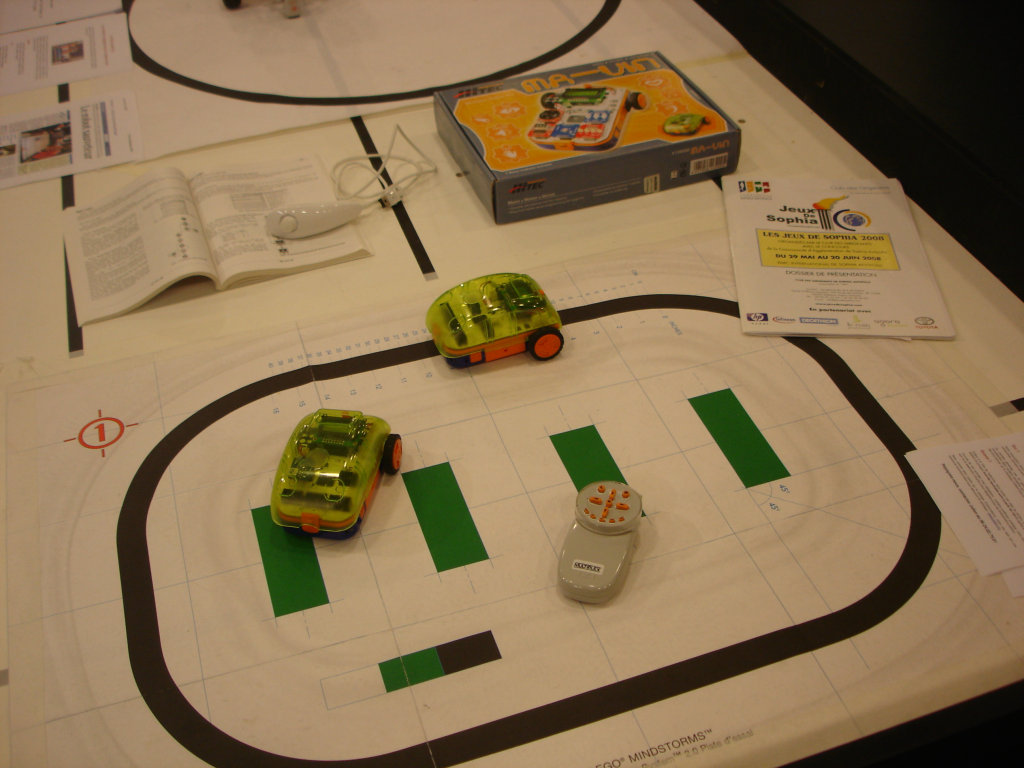
– ensuite le robot Lego : il est équipé de capteurs de lumière similaires aux Ma-vin, mais plus performant puisqu’il permet une mesure de distance. On peut alors expliquer les principes de l’émission/réception et de la différence entre valeur booléenne (tout ou rien) et analogique.
– le premier robot dont on voit l’intérieur : le robot Asuro.
– puisqu’on a commencé à voir l’électronique, les capteurs et les moteurs d’un robot, on embraye avec l’intérieur d’une imprimante : récupération de l’électronique, des roues, et bien sûr des moteurs.
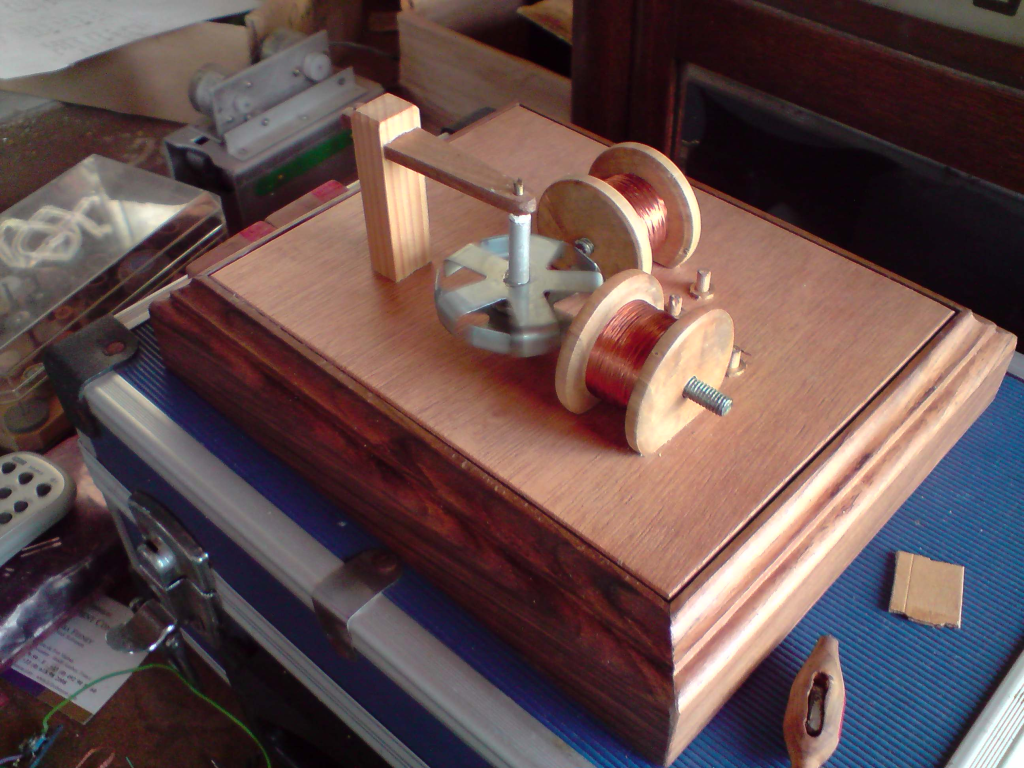
– et qui dit moteur dit explications d’Henri sur les moteurs électriques. Le moteur pas-à-pas et le moteur à courant continu sont expliquées sur des réalisations ’maison’ qui fonctionnent réellement.
– après avoir vu les principes, vu les composants, on passe au premier robot entièrement réalisé "à la main" : le Nanobot, un robot personnel réalisé avec des composants de récupération (moteurs de cd-rom, capteurs de souris, etc.)
– et on présente les robots de la Coupe de France

__3__
Mercredi 19
Une journée sans visites scolaires mais nous n’avons pas chômé pour autant : le public était au rendez-vous et nous avons eu beaucoup d’enfants, passionnés par nos démonstrations et qui posaient beaucoup de questions car ils avaient plus de temps que lorsqu’ils sont en groupe avec leur classe.
Premier jour ouvert à tous, nous recevons des ingénieurs des entreprises de la technopôle, pas forcément informés de la Fête de la Science mais venus à la bibliothèque ou à la vidéothèque et nous trouvant sur leur chemin. C’est l’occasion de sortir les démos un peu plus costaud, comme nos expériences sur les microprocesseurs Rabbit et le module RCM5700 que nous a proposé la société Matlog. Nous avons concocté un scénario utilisant notre tout nouvel analyseur logique (reçu mardi matin !) de Saleae qui permet de visualiser les trames envoyées par le Rabbit, et notamment mettre en évidence la synchronisation des tâches que permet le langage Dynamic C.
Nouveauté : les vidéos sont projetées sur le grand écran, ce qui n’est pas possible lors des visites scolaires à cause du bruit et de la baisse d’attention que cela provoquerait. En taille géante, nos robots sont impressionnants. Et il ne faut pas oublier le Big Dog qui fait toujours l’admiration des visiteurs, petits et même surtout les grands :
Pas d’incident majeur à noter, les démos tournent sans problèmes : le robot 2008 envoie toujours les balles dans les paniers, et même si on a quelque fois une vis qui se déserre, un coup de clé Allen et c’est réglé.
Bien sûr, les accus commencent à faiblir, et je ne parle pas uniquement des batteries des robots : debout à parler pendant toute une journée, ça affaiblit et la pause déjeuner est très appréciée !
Le cadre de la médiathèque est vraiment bien : l’équipe est sympathique au possible, et la salle suffisamment grande pour pouvoir expliquer 3 voire 4 ateliers en même temps sans se gêner.
Jeudi 20
Reprise des présentations aux classes d’établissements scolaires du département. Surtout des collèges. Certains ont déjà assisté à la conférence d’Eric sur la robotique le matin, donc sont très heureux de pouvoir voir fonctionner les systèmes qui leur ont été décrit plus tôt.
Les enfants sont très intéressés, et il y a des réactions intéressantes, positives dans tous les cas : ceux qui connaissent et qui sont content de montrer leurs connaissances en physique ou en technologie et ceux qui ne connaissent pas et sont ravis d’apprendre.
De manière générale, beaucoup d’admirations devant les robots et les présentations, et c’est ce qui nous fait le plus plaisir. La présentation des différents moteurs électriques par exemple est un grand succès.
Un autre succès : les livres et manuels techniques.

Vendredi 21
Dernière journée de visite des classes d’élèves et avant-dernière journée pour tous publics. Les classes se succèdent et nous ne voyons pas le temps passé. Surtout que nous recevons également les membres de l’association, actuels et anciens, ainsi qu’une délégation d’officiels venus inaugurer la Navette des Sciences.
Nous présentons ainsi aux représentants de la région, du département, de la ville de Valbonne et de la communauté d’agglomération (CASA) nos différents robots et leur expliquons les liens entre notre association, les établissements scolaires et les ingénieurs issus de différents domaines des sciences et techniques.
Une journée somme toute plus longue que les autres puisque nous faisons "nocturne" en terminant à 19h.
Samedi 22
Notre dernière journée ! La plus courte (10h-16h) mais la plus intense, puisque nous recevons tous les publics : les élèves déjà venus dans la semaine reviennent en famille, et nous accueillons également les personnes qui travaillaient la semaine.
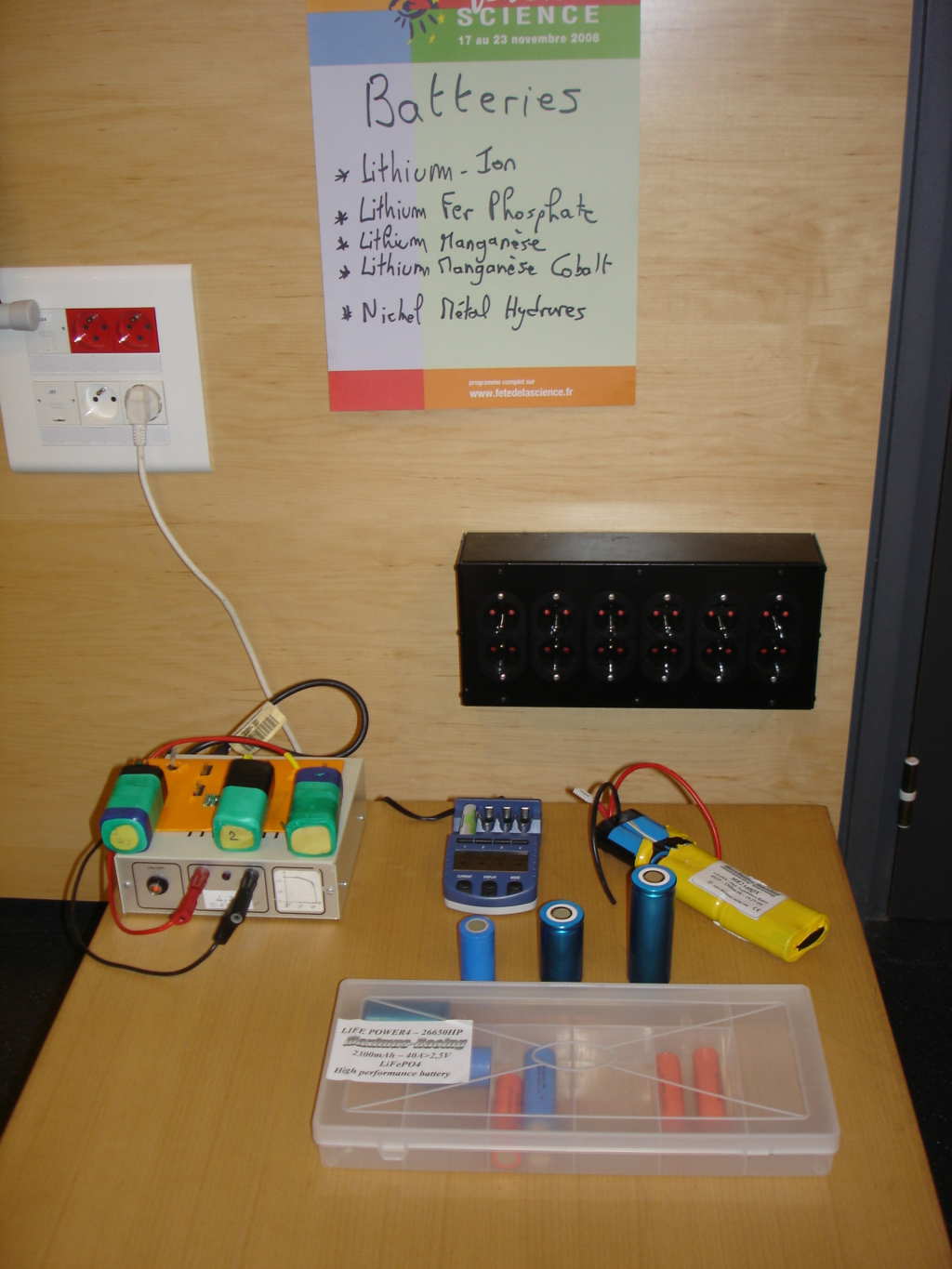
Avec l’expérience des fêtes de la science passées, nous nous préparons à des questions plus techniques et au vu des bonnes conditions de la salle de la médiathèque, nous installons une autre présentation qui intéressera beaucoup de visiteurs : les nouvelles technologies de batteries.
En plus des accus que nous utilisons dans nos robots (Plomb, Nickel-Cadmium, Lithium-Ion), une société niçoise (Maximus Racing) nous a prêté différents échantillons des technologies les plus modernes : Lithium Fer Phosphate (LiFePO4 ou A123), Lithium Manganèse et Lithium Manganèse Cobalt ! Merci à eux.
Conclusion
Je partage l’avis qu’Eric a formulé : ça a été une des éditions les plus réussies, d’une part grâce à la qualité de l’hébergement par la Médiathèque (taille et équipement du local, convivialité de l’équipe, etc.) et aussi car nous avons eu la visite de gens se rendant à la Médiathèque mais sans être au courant de notre exposition. Des visiteurs que nous n’aurions donc pas eus si nous avions été installés ailleurs.
Donc c’est une expérience à renouveler et nous serons là en 2009 !






Vos commentaires
# Le 19 novembre 2008 à 10:23, par mic En réponse à : Compte-rendu de la Fête de la Science 2008
En réponse à : Compte-rendu de la Fête de la Science 2008
Bonjour , vous dites que le robot Lego est equipé de capteurs de lumiére plus performant que ma-vin et qu’ils permettent de mesurer la distance . Ce ne serait plutôt pas des capteurs ultrasons , car des cateurs de lumiére ne mesurent pas la distance pour éviter les obstacles .
# Le 19 novembre 2008 à 14:35, par Julien H. En réponse à : Compte-rendu de la Fête de la Science 2008
En réponse à : Compte-rendu de la Fête de la Science 2008
Nous utilisons les capteurs de lumière pour estimer les distances après échantillonnages.
http://www.robotshop.ca/capteur-lumiere-nxt-lego-mindstorms-2.html
# Le 19 novembre 2008 à 19:48, par mic En réponse à : Compte-rendu de la Fête de la Science 2008
En réponse à : Compte-rendu de la Fête de la Science 2008
Bonsoir , en quoi les capteurs de lumière avec echantillonnages consistent ils ? car je ne connais pas cette technique .
# Le 19 novembre 2008 à 20:07, par Julien H. En réponse à : Compte-rendu de la Fête de la Science 2008
En réponse à : Compte-rendu de la Fête de la Science 2008
On utilise un capteur de lumière qui donne une valeur analogique (par exemple entre 0 et 1024, selon qu’il n’y a pas de lumière ou beaucoup de lumière).
On se met dans les conditions d’utilisation normales (éclairage et environnement). On place alors un obstacle (carton blanc) à chacune des distances qu’on souhaite reconnaître et on demande à un circuit électronique d’enregistrer chacune des valeurs correspondantes.
Lorsqu’on voudra connaitre la distance, on fera appel à ce circuit "mémoire" qui pourra nous donner une estimation basée sur la table des échantillons.
Voir la courbe analogique de ce capteur : Capteur de lumière ambiante
# Le 19 novembre 2008 à 23:10, par mic En réponse à : Compte-rendu de la Fête de la Science 2008
En réponse à : Compte-rendu de la Fête de la Science 2008
Merci pour l’explication des capteurs de lumiére , mais quels avantages par rapport aux ultrasons qui eux aussi permettent d’evaluer la distance des obstacles .Apparamment je trouve la mise en oeuvre moins simple que les sonars
# Le 20 novembre 2008 à 19:01, par Julien H. En réponse à : Compte-rendu de la Fête de la Science 2008
En réponse à : Compte-rendu de la Fête de la Science 2008
Je ne sais pas, je n’ai pas comparé. Le prix, la distance couverte, la simplicité de mise en oeuvre, etc..
A bien y réfléchir, le temps de réponse me semble meilleur avec les capteurs de lumière qu’avec des ultrasons. A vos calculettes.
Répondre à ce message