 PoBot
PoBot
 Architecture électronique
Architecture électroniqueNotre robot contient 4 cartes électroniques en tout et pour tout :
– 2 cartes CPU, à base d’ATMega32, qui ne sont autres que notre Carte Numérique Polyvalente
– 2 cartes drivers de moteur pas à pas, à base de L6208
Les 2 cartes CPU communiquent par liaison I2C. Les cartes drivers sont connectées au moyen d’une liaison à base d’I/O (clock, direction, enable). La CMUcam est reliée à la carte CPU slave via une liaison RS232.
L’ensemble s’agence comme illustré ci-dessous :
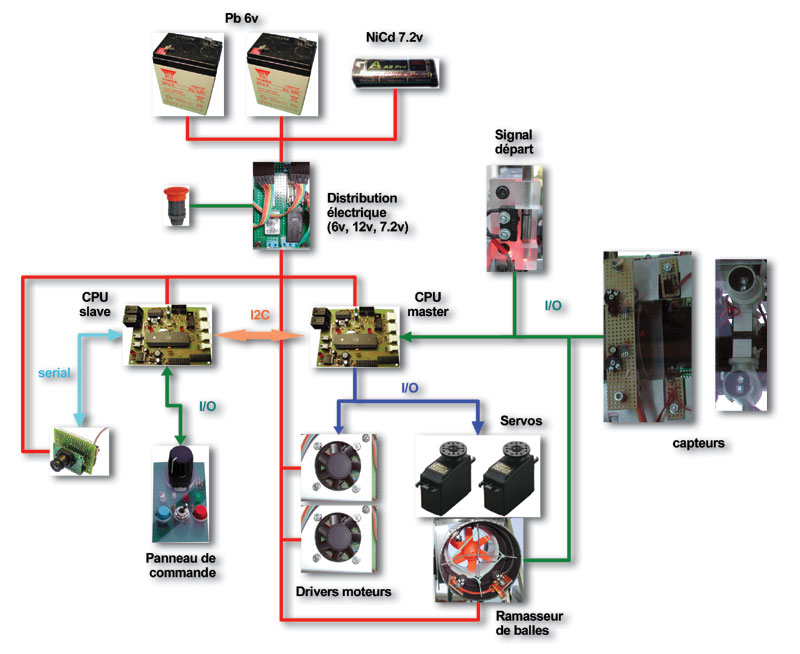
3 tensions électriques sont nécessaires :
– 7,2V fourni par un pack NiCd, destiné aux cartes logiques et à la CMUcam
– 6V fourni par un accu Pb, pour la turbine
– 12V fourni par un 2ème accu Pb, en série avec le précédent, pour les moteurs de propulsion
Ces trois tensions sont coupées par des relais commandés par l’arrêt d’urgence.
En termes de capteurs, il embarque :
– 2 SHARP IS471F dans la turbine, pour la détection de balle et l’identification de sa couleur
– 2 SHARP IS471F en bordure de la zone de dépose et travaillant en réflexion pour repérer la position de dépose par rapport au trou
– 2 SHARP IS471F en barrière pour détecter la présence de la balle dans la zone de dépose et sa chute dans le trou (pour plus de détails : lire l’article Dépose des balles)
– 2 HAMAMATSU S6986 pour l’identification de la couleur des trous et le calage du robot (pour plus de détail sur leur utilisation : lire l’article Détection de couleur)
– 2 fin de course en bumper arrière, pour le recalage de cap sur les bordures de terrain
– 2 fin de course pour le contrôle du déploiement du bras porte turbine
– un fin de course pour le jack de départ
Pour ce qui est des actionneurs :
– un servo pour le déploiement du bras porte turbine
– un variateur de vitesse pour le contrôle du régime de la turbine
– 2 servos pour le déploiement des bras déclencheurs de totem




